1.本发明实施例涉及机器人技术,尤其涉及,特别涉及一种用于机器人的小空间人体识别避让方法及系统。
背景技术:
2.机器人在生活中的应用越来越广泛,例如,可以将机器人应用于餐厅中,使机器人进行送餐或收盘等工作。但餐厅等场所人员众多,机器人在行走时容易与人体发生碰撞,影响工作效率。
3.现有技术中,机器人依靠激光雷达反馈回的点云信息,确定前方存在障碍物,对遇到的障碍物实现避让。但无法对不同种类的障碍物的进行区分,无法根据不同的障碍物进行针对性避让,容易出现机器人碰撞行人或压脚等情况。
技术实现要素:
4.有鉴于此,本发明提供一种用于机器人的小空间人体识别避让方法及系统,通过根据机器人选择要识别的人体目标动作特征,即时生成新的动作特征识别规则来识别对应的人体目标空间分布,用以及时识别该人体目标动作特征,操作更简单,效率更高。
5.本发明实施例提供一种用于机器人的小空间人体识别避让方法,包括:
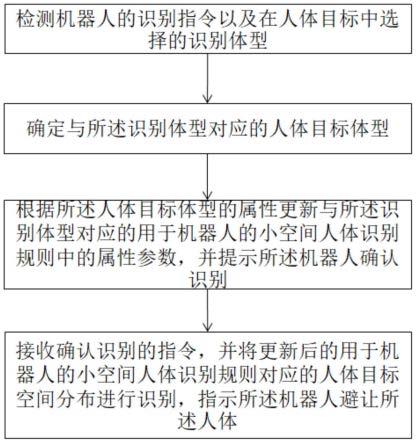
6.检测机器人的识别指令以及在人体目标中选择的识别体型;确定与所述识别体型对应的人体目标体型;根据所述人体目标体型的属性更新与所述识别体型对应的用于机器人的小空间人体识别避让规则中的属性参数,并提示所述机器人确认识别;接收确认识别的指令,并将更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别,指示所述机器人避让所述人体。
7.本发明实施例提供一种用于机器人的小空间人体识别避让系统,包括:
8.检测模块,用于检测机器人的识别指令以及在人体目标中选择的识别体型;确定模块,用于确定与所述识别体型对应的人体目标体型;更新模块,用于根据所述人体目标体型的属性更新与所述识别体型对应的用于机器人的小空间人体识别避让规则中的属性参数;提示模块,用于提示所述机器人确认识别;接收模块,机器人接收确认识别的指令;识别模块,用于将所述更新模块更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别。
9.根据上述实施例的用于机器人的小空间人体识别避让方法及系统,机器人选中要识别的人体目标内容所在的区域,监控器根据机器人的选择自动更新人体目标内容的识别规则,并将与该识别规则对应的人体目标空间分布进行识别,以达到识别该人体目标内容的目的,再次加载该人体目标时,即时执行识别规则,使得识别的人体目标内容不再出现,操作更简单,效率更高,识别规则更新快。并且机器人根据自己的性能选择识别的人体目标内容,操作针对性更强。
10.为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,
并配合所附图式,作详细说明如下。
附图说明
11.图1为本发明第一实施例提供的用于机器人的小空间人体识别避让方法流程示意图;
12.图2为本发明一实施例提供的用于机器人的小空间人体识别避让系统的结构模块图。
具体实施方式
13.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
14.本发明实施例提供的用于机器人的小空间人体识别避让方法可以单独作为用于机器人的小空间人体识别避让的方式,也可以结合已有的adblock动作特征插件一起使用来识别人体目标动作特征,适用范围广。以下各实施例的人体目标内容以人体目标动作特征为例,其他人体目标内容也使用本发明实施例提供的用于机器人的小空间人体识别避让方法。
15.请参阅图1,本发明第一实施例中的用于机器人的小空间人体识别避让方法包括:
16.101、检测机器人的识别指令以及在人体目标中选择的识别体型;
17.本发明实施例可适用于移动终端,也可适用于pc电脑终端。当在移动终端适用场景下,机器人进行手势操作,例如,手指在要识别体型长按触控屏,当在pc电脑终端适用场景下,机器人将鼠标移到要识别体型,监控器检测到上述手势和鼠标操作后,判断为机器人要识别当前人体目标的内容,弹出操作菜单。
18.进一步地,在该操作菜单中有识别的指令,机器人选择该识别指令,监控器提示机器人选择识别体型。机器人通过手指在屏幕上选择识别体型,或通过鼠标选择识别体型,监控器检测机器人的识别指令的同时,检测机器人在人体目标中选择的识别体型。并且,为突出识别体型,将识别体型的边框设置为特殊格式,例如用粗黑线将边框做突出显示,该特殊格式是预置在系统中的,当确定识别体型后,自动使用该特殊格式。
19.以机器人识别当前人体目标中的人体目标动作特征为例,当机器人通过监控器浏览人体目标时,机器人显示界面201右下角有人体目标动作特征202弹出,机器人在人体目标动作特征位置进行特定操作,例如,在pc电脑终端通过点击鼠标右键,或,在移动终端通过手指在触控屏上长按以调出操作菜单,此时监控器检测到上述鼠标或手指的操作后弹出操作菜单,在该操作菜单中有识别动作特征相关选项,该操作菜单203中有“避让此动作特征”的选项,机器人点击此选项后,通过鼠标、手写系统或手指的操作将要识别的人体目标动作特征圈选出来,由粗黑线突出显示的黑色边框204围绕的部分为机器人选中的要识别的人体目标动作特征。
20.102、确定与该识别体型对应的人体目标体型;
21.确定与机器人选择的该识别体型对应的人体目标体型,该人体目标体型是与该识别体型的指定度量值相同的人体目标空间分布。计算运动人体的空间特征。此步骤需要计算当前第i帧的轮廓直方图及x方向和x方向的光流场直方图。具体方法为:
22.通过帧差法实现,首先将相邻的两帧图像转换为灰度图,然后作差。假设ii和i
i 1
是相邻的两帧图像,x为两帧中对应位置的像素值,那么它们的差定义为:
23.dii(x)=|ii(x)-i
i-1(
x)|.
24.帧差图像vi中像素x的灰度值定义为:
25.v i(x)=255 ifdi i(x)》∈
26.=0 otherwise
‑‑‑
(2)
27.ε为预设的参数。如果ε过小,会使vi中出现较多的噪点,如果选得太大又不能完整地提取人体运动区域,所以这个参数的选取需要事先调试至一合适值;
28.将得到的矩形区域ri分成2
×
2的四个子区域,每一个子区域对应一个表征方向的饼状图。该饼状图的中心与子区域的中心重合,以x轴正半轴所在方向为0
°
角,每隔20
°
取一次值,则360
°
的圆盘被平均分成了18份,于是每一份的区间分别为[1
°
,20
°
],[21
°
,40
°
],
…
,[341
°
,360
°
]。通过统计轮廓走向落在这些区间的次数便可得到包含18个区间的轮廓统计直方图(也就是18维的特征向量)光流特征的计算采用lucas-kanade方法,其主要目的是求解如下的关于光流(u,v)的约束方程:
[0029]ix
u i
x
v ii=0.(3);
[0030]
求得(u,v)后,再分别在x方向和x方向做中值滤波,于是类似于轮廓统计直方图的获得方法,可以得到在x和x两个方向各18维的光流统计直方图。所以描述每个子区域的特征向量共有18
×
3=54维。又由于ri被分成了2
×
2的四个子区域,所以第i帧的人体运动情形可以暂时用54
×2×
2=216维的特征向量表示。
[0031]
103、根据该人体目标体型的属性更新与该识别体型对应的用于机器人的小空间人体识别避让规则中的属性参数,并提示该机器人确认进行识别;
[0032]
用于机器人的小空间人体识别避让规则用属性及属性值来表示,可通过更新不同的属性及属性值等属性参数,来更新已存在的人体目标网动作特征规则,得到与该识别体型对应的用于机器人的小空间人体识别避让规则。
[0033]
具体地,用于机器人的小空间人体识别避让规则是已经预置在系统中了,通过更新规则中的各参数,便可得到对应的新的用于机器人的小空间人体识别避让规则。每个人体目标体型的属性均有对应的属性值(value),根据该识别体型的人体目标体型的属性更新用于机器人的小空间人体识别避让规则中的属性参数,得到与该识别体型对应的用于机器人的小空间人体识别避让规则。符合该属性值的人体目标内容均会被识别,不仅仅是人体目标动作特征内容可以被识别。
[0034]
接收机器人监控器发送的针对目标用户的深度图像数据流和彩色图像数据流;
[0035]
根据所述深度图像数据流和所述彩色图像数据流,获得所述机器人监控器至所述目标用户的距离;并获得所述目标用户在深度图像中的第一数据,其中,所述第一数据包括身高数据、上肢左右径数据、上肢前后径数据、下肢左右径数据和下肢前后径数据;
[0036]
根据所述距离、所述第一数据以及实际尺寸与图像尺寸的比例,计算所述目标用户的实际数据,所述实际数据包括身高实际数据、上肢左右径实际数据、上肢前后径实际数据、下肢左右径实际数据和下肢前后径实际数据;
[0037]
根据所述实际数据,评估所述目标用户的体型。
[0038]
根据所述实际数据以及体型构建公式,计算所述体型构建公式的函数值;
[0039]
根据所述函数值,评估所述目标用户的体型。
[0040]
体型构建公式的公式为:
[0041][0042]
其中,
[0043]
a1为上肢左右径实际数据,a2为上肢前后径实际数据,b1为下肢左右径实际数据,b2为下肢前后径实际数据,h为身高实际数据。
[0044]
进一步地,提示该机器人确认进行识别,可以是弹出用于机器人的小空间人体识别避让的确认界面。该确认界面中包括识别提示信息,以及,取消和确定两个选择按钮,识别提示信息内容可以是“要避让选中的动作特征吗?”,当机器人选择取消时,取消本次用于机器人的小空间人体识别避让,当机器人选择确定时,执行本次用于机器人的小空间人体识别避让。
[0045]
104、接收确认识别的指令,并将更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别,指示所述机器人避让所述人体。
[0046]
接收确认识别的指令后,监控器将更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别,指示所述机器人避让所述人体,这样,便将机器人选择的识别体型对应的人体目标内容进行了识别,即,机器人圈选的人体目标动作特征被识别掉了,下次再访问该人体目标此人体目标动作特征也会被识别,不会再显示在机器人显示界面上。
[0047]
本发明实施例中,机器人选中要识别的人体目标动作特征所在的区域,监控器根据机器人的选择自动更新对应的识别规则,并将与该识别规则对应的人体目标空间分布进行识别,以达到识别该人体目标内容的目的,再次加载该人体目标时,识别的人体目标内容不再出现,操作更简单,效率更高,识别规则更新快。并且机器人根据自己的性能选择识别的人体目标内容,操作针对性更强。
[0048]
本发明第二实施例提供的用于机器人的小空间人体识别避让方法包括:
[0049]
201、检测机器人的识别指令以及在人体目标中选择的识别体型;
[0050]
本发明实施例可适用于移动终端,也可适用于pc电脑终端。当在移动终端适用场景下,机器人进行手势操作,例如,手指在要识别体型长按触控屏,当在pc电脑终端适用场景下,机器人将鼠标移到要识别体型,监控器检测到上述手势和鼠标操作后,判断为机器人要识别当前人体目标的内容,弹出操作菜单。
[0051]
进一步地,在该操作菜单中有识别的指令,机器人选择该识别指令,监控器提示机器人选择识别体型。机器人通过手指在屏幕上选择识别体型,或通过鼠标选择识别体型,监控器检测机器人的识别指令的同时,检测机器人在人体目标中选择的识别体型。并且,为突出识别体型,将识别体型的边框设置为特殊格式,例如用粗黑线将边框做突出显示,该特殊格式是预置在系统中的,当确定识别体型后,自动使用该特殊格式。
[0052]
以机器人识别当前人体目标中的人体目标动作特征为例,当机器人通过监控器浏览人体目标时,机器人显示界面201右下角有人体目标动作特征202弹出,机器人在人体目标动作特征位置进行特定操作,例如,在pc电脑终端通过点击鼠标右键,或,在移动终端通
过手指在触控屏上长按以调出操作菜单,此时监控器检测到上述鼠标或手指的操作后弹出操作菜单,在该操作菜单中有识别动作特征相关选项,该操作菜单203中有“避让此动作特征”的选项,机器人点击此选项后,通过鼠标、手写系统或手指的操作将要识别的人体目标动作特征圈选出来,由粗黑线突出显示的黑色边框204围绕的部分为机器人选中的要识别的人体目标动作特征。
[0053]
202、确定该识别体型的中心在人体目标中的人体目标空间分布;
[0054]
确定机器人选择的识别体型的中心点,获取该中心点在机器人显示界面内的坐标p(centerx,centerx),进一步确认该坐标对应的人体目标体型。
[0055]
203、判断该人体目标空间分布的指定度量值是否与该区域的该指定度量值相符;
[0056]
指定度量值指宽和高。进一步地,获取该体型的宽和高,判断该体型的左右径和高度是否与机器人选择的识别体型的左右径和高度相符。
[0057]
若是,则执行步骤204;若否,则执行步骤205。
[0058]
204、将该人体目标空间分布保存为该人体目标体型;
[0059]
若该体型的左右径和高度与机器人选择的识别体型的左右径和高度相符,则成功找到需要识别的体型,将其保存为人体目标体型。
[0060]
205、在该人体目标空间分布的各级人体外延比例中逐级查找该指定度量值与该区域的该指定度量值相符的人体外延比例,将第一个查找到的符合条件的人体外延比例保存为该人体目标体型;
[0061]
若该体型的左右径和高度与机器人选择的识别体型的左右径和高度不相符,则查找该体型的人体外延比例,并判断该人体外延比例的左右径和高度是否与机器人选择的识别体型的左右径和高度相符,这样逐级向上一直查找到人体外延比例为空,如果在查找过程中没有找到符合条件的体型,则认为查找失败,如果查找到符合条件的体型,便将其保存为人体目标体型。
[0062]
以上过程可以概括为,从该人体目标空间分布及其人体外延比例中查找左右径和高度与机器人选择的识别体型的左右径和高度相符的节点,记录下查找到的第一个节点作为人体目标体型。
[0063]
206、获取该人体目标体型的属性以及属性值;
[0064]
获取该人体目标体型的属性以及属性值,该人体目标体型的属性均有对应的属性值(value),符合该属性值的人体目标空间分布会被识别。
[0065]
具体地,可以用一个或多个属性的组合来标识各体型,体型的属性有class,id,stxle等,选用作为生成用于机器人的小空间人体识别避让规则的属性优先级是:id》class》stxle,即,若只通过一个属性来标识体型,以作为生成用于机器人的小空间人体识别避让规则,则优先选用id这个属性。
[0066]
207、更新与该属性以及属性值相同的人体目标空间分布的显示状态为识别,并提示该机器人确认进行识别;
[0067]
更新与获取的属性以及属性值相同的人体目标空间分布的显示状态为识别,由此可通过一个多个人体目标空间分布的属性及属性值设置用于机器人的小空间人体识别避让规则。
[0068]
用加速度传感器的x轴数据来分析区别原地“运动”与“静止”这两种动作。一次运
动动作包括两个极大值一个极小值,对于运动动作的起始点,设置的阈值为x
t0
=am/s2,此时对应的时刻为t0,当x》x
t0
时,就认为可能发生了一次运动动作,并不断对t0时刻后的x值进行判断,当x《x
t1
,x
t1
=am/s2时,此时对应的时刻为t1,之后检测是否有极小值的出现,即对[t1,t1 0.3s]时间段内的x值不断进行判断,当x《x
t2
,x
t2
=bm/s2作为判断极小值出现的条件,之后当x》x
t3
,x
t3
=bm/s2时,记录时刻t3,并检测之后是否有极大值的出现,即对[t3,t3 0.5s]时间段进行检测,当x》x
t4
,x
t4
=am/s2时,就初步判定一次运动动作的发生;
[0069]
运动行为识别树从根节点到叶节点形成的路径构成了分类规则,使用“if-then”形式表示分类规则如下:
[0070]
(1)if5m/s2《x《20m/s2then无动作状态;
[0071]
(2)ifx》20m/s2并且极大值极小值周期出现并且
△
t《0.3s并且出现的极大值极小值达到跑的阈值then跑;
[0072]
(3)ifx》20m/s2并且极大值极小值周期出现并且
△
t《0.3s并且出现的极大值极小值没有达到跑的阈值then其他动作;
[0073]
(4)ifx》20m/s2并且极大值极小值周期出现并且
△
t》0.3s并且出现的极大值极小值达到跑的阈值then其他动作;
[0074]
(5)ifx》20m/s2并且极大值极小值周期出现并且
△
t》0.3s并且出现的极大值极小值没有达到跑的阈值then其他动作;
[0075]
(6)ifx》20m/s2并且极大值极小值出现一次并且出现的极大值极小值达到运动动作的阈值then运动;
[0076]
(7)ifx》20m/s2并且极大值极小值出现一次并且出现的极大值极小值没有达到运动动作的阈值then其他动作;
[0077]
(8)ifx《5m/s2并且前1s出现达到阈值的极大值then其他动作;
[0078]
(9)ifx《5m/s2并且前1s没有出现达到阈值的极大值并且之后0.5s内出现达到静止阈值的极大值then静止;
[0079]
(10)ifx《5m/s2并且前1s没有出现达到阈值的极大值并且之后0.5s内没有出现达到静止阈值的极大值then其他动作。
[0080]
进一步地,提示该机器人确认进行识别,弹出用于机器人的小空间人体识别避让的确认界面。
[0081]
在监控器启动时将解析内存中所有的用于机器人的小空间人体识别避让规则,在机器人显示界面加载结束时判断是否存在当前加载的人体目标动作聚类相符的用于机器人的小空间人体识别避让规则,若存在,则确认与用于机器人的小空间人体识别避让规则对应的要识别的体型,具体是通过调用相关的动作将其识别,若不存在则不作处理。将生成的用于机器人的小空间人体识别避让规则保存在内存中,即时生效。
[0082]
具体实例中,机器人通过圈选人体目标动作特征生成的用于机器人的小空间人体识别避让规则,则及时添加到内存中,立即生效,下次再打开该人体目标则该圈选的人体目标动作特征不再弹出。
[0083]
进一步地,机器人可以通过用于机器人的小空间人体识别避让规则管理界面对各用于机器人的小空间人体识别避让规则进行选择或删除管理。具体地,当检测到机器人触发管理用于机器人的小空间人体识别避让规则的操作时,显示管理界面,在该管理界面中
显示各用于机器人的小空间人体识别避让规则对应的人体目标缩略图以及对应的选择按钮,根据机器人的选择操作,确定当前生效的用于机器人的小空间人体识别避让规则。用于机器人的小空间人体识别避让规则管理界面701,机器人可通过单击人体目标缩略图702或703(可以是人体目标截图)左侧的选择按钮704或705来确定是否识别人体目标缩略图中对应的人体目标动作特征。选中(选择按钮704)为表示需要识别,不选中(选择按钮705)表示不需要识别。机器人选择时只需要通过人体目标缩略图来辨认要识别的人体目标动作特征,并通过点击操作来确认是否识别,可辨识性强且操作简单。
[0084]
207、接收确认识别的指令,并将该用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别。
[0085]
接收确认识别的指令后,将更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别,指示所述机器人避让所述人体,这样,便将该识别体型对应的人体目标内容进行了识别,即,机器人圈选的人体目标动作特征被识别掉了,下次再访问该人体目标此人体目标动作特征也会被识别,不会再显示在机器人显示界面上。
[0086]
本发明实施例中,机器人选中要识别的人体目标动作特征所在的区域,监控器根据机器人的选择自动更新人体目标动作特征的识别规则,并将与该识别规则对应的人体目标空间分布进行识别,以达到识别该人体目标内容的目的,再次加载该人体目标时,识别的人体目标内容不再出现,操作更简单,效率更高,识别规则更新快。并且机器人根据自己的性能选择识别的人体目标内容,操作针对性更强。
[0087]
本发明第三实施例提供了用于机器人的小空间人体识别避让系统,该系统包括检测模块801,用于检测机器人的识别指令以及在人体目标中选择的识别体型;
[0088]
确定模块802,用于确定与该识别体型对应的人体目标体型;
[0089]
更新模块803,用于根据该人体目标体型的属性更新与该识别体型对应的用于机器人的小空间人体识别避让规则中的属性参数;
[0090]
提示模块804,用于提示该机器人确认识别;
[0091]
接收模块805,机器人接收确认识别的指令;
[0092]
识别模块806,用于将该用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别。
[0093]
关于本实施例的系统中各模块实现技术方案的其他细节,可参考第一实施例的描述,此处不再赘述。
[0094]
本实施例中,机器人选中要识别的人体目标动作特征所在的区域,监控器根据机器人的选择自动更新人体目标动作特征的识别规则,并将与该识别规则对应的人体目标空间分布进行识别,以达到识别该人体目标内容的目的,再次加载该人体目标时,识别的人体目标内容不再出现,操作更简单,效率更高,识别规则更新快。并且机器人根据自己的性能选择识别的人体目标内容,操作针对性更强。
[0095]
参照附图2,本发明第四实施例提供的用于机器人的小空间人体识别避让系统包括:
[0096]
检测模块901,用于检测机器人的识别指令以及在人体目标中选择的识别体型;
[0097]
确定模块902,用于确定与该识别体型对应的人体目标体型;
[0098]
更新模块903,用于根据该人体目标体型的属性更新与该识别体型对应的用于机
器人的小空间人体识别避让规则中的属性参数;
[0099]
提示模块904,用于提示该机器人确认识别;
[0100]
接收模块905,机器人接收确认识别的指令;
[0101]
识别模块906,用于将更新模块903更新后的用于机器人的小空间人体识别避让规则对应的人体目标空间分布进行识别。
[0102]
其中,确定模块902包括:
[0103]
确定子模块9021,用于确定该识别体型的中心在人体目标中的人体目标空间分布;
[0104]
第一判断模块9022,用于判断该人体目标空间分布的指定度量值是否与该识别体型的所述指定度量值相符;
[0105]
保存模块9023,用于若第一判断模块9022判断该人体目标空间分布的指定度量值与该识别体型的该指定度量值相符,则将该人体目标空间分布保存为该人体目标体型;
[0106]
查找子模块9024,用于若第一判断模块9022判断该人体目标空间分布的指定度量值与该识别体型的该指定度量值不相符,则在该人体目标空间分布的各级人体外延比例中逐级查找该指定度量值与该识别体型的该指定度量值相符的人体外延比例;
[0107]
保存模块9023,还用于将查找子模块9024第一个查找到的符合条件的人体外延比例保存为该人体目标体型。
[0108]
更新模块903包括:
[0109]
获取模块9031,用于获取该人体目标体型的属性以及属性值;
[0110]
更新子模块9032,用于更新与该属性以及属性值相同的人体目标空间分布的显示状态为识别。
[0111]
进一步地,该系统还包括:
[0112]
解析模块907,用于当加载人体目标时,解析并读取所有用于机器人的小空间人体识别避让规则;
[0113]
第二判断模块908,用于判断是否存在所加载人体目标的动作聚类符合的用于机器人的小空间人体识别避让规则。
[0114]
识别模块906,还用于若第二判断模块908判断存在所加载人体目标的动作聚类符合的用于机器人的小空间人体识别避让规则,则识别与所符合的用于机器人的小空间人体识别避让规则中的人体目标空间分布属性以及属性值相同的人体目标空间分布。
[0115]
该系统还可以进一步包括:
[0116]
显示模块909,用于当检测到机器人触发管理用于机器人的小空间人体识别避让规则的操作时,显示管理界面,该管理界面中显示各用于机器人的小空间人体识别避让规则对应的人体目标缩略图以及对应的选择按钮。
[0117]
进一步地,确定模块902,还用于根据该机器人的选择操作,确定当前生效的用于机器人的小空间人体识别避让规则。
[0118]
关于本实施例的系统中各模块实现技术方案的其他细节,可参考第一及第二实施例的描述,此处不再赘述。
[0119]
本实施例中,机器人选中要识别的人体目标动作特征所在的区域,监控器根据机器人的选择自动更新人体目标动作特征的识别规则,并将与该识别规则对应的人体目标空
间分布进行识别,以达到识别该人体目标内容的目的,再次加载该人体目标时,识别的人体目标内容不再出现,操作更简单,效率更高,识别规则更新快。并且机器人根据自己的性能选择识别的人体目标内容,操作针对性更强。
[0120]
此外,本发明实施例还提供一种计算机可读存储介质,其内存储有计算机可执行指令,上述的计算机可读存储介质例如为非易失性存储器例如光盘、硬盘、或者闪存。上述的计算机可执行指令用于让计算机或者类似的运算系统完成上述的数据处理方法中的各种操作。
[0121]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
