技术特征:
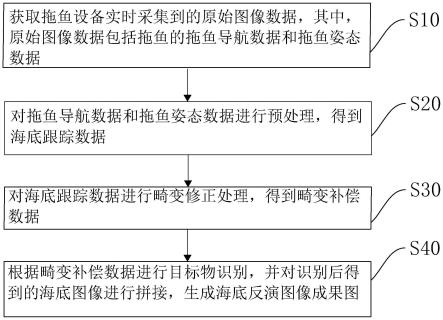
1.一种机器学习水深反演方法,其特征在于,所述机器学习水深反演方法包括:获取拖鱼设备实时采集到的原始图像数据,其中,所述原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据;对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据;对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据;根据所述畸变补偿数据进行目标物识别,并对识别后得到的海底图像进行拼接,生成海底反演图像成果图。2.根据权利要求1所述的机器学习水深反演方法,其特征在于,所述对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据,具体包括:将所述拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别的拖鱼转码数据;对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据;对所述回波强度数据进行量化处理,得到回波强度量化数据;根据所述回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。3.根据权利要求1所述的机器学习水深反演方法,其特征在于,所述对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据,具体包括:计算待探测目标物与探测拖鱼设备之间的横向距离,得到拖鱼当前位置和待探测目标物之间的横向距离数据;根据所述横向距离数据在所述原始图像数据进行像素点标记,得到像素点标记后的校正图像数据;对所述校正图像数据中的每个待探测目标物的像素点进行计算,得到所述校正图像数据中的每个待探测目标物的像素值;根据所述像素值对所述海底跟踪数据进行误差补偿,得到每个待探测目标物的畸变补偿数据。4.根据权利要求3所述的机器学习水深反演方法,其特征在于,所述根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图,具体包括:根据所述畸变补偿数据对探测目标物进行特征归类,得到符合海底目标物特征的目标物特征数据集;将所述目标特征数据集中对应的探测目标物位置在所述原始图像数据上进行标记,得到海底物质分布图集;按照所述横向距离数据对识别后的所述海底物质分布图集进行图像拼接处理,得到海底反演图像成果图。5.根据权利要求1所述的机器学习水深反演方法,其特征在于,在所述根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图之后,还包括:获取待测水域的侧视声呐图像数据和多波束测探数据;根据所述侧视声呐图像数据和多波束测探数据,对所述海底反演图像成果图进行数据
修正处理,得到修正后的海底地形数据;根据所述海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据。6.根据权利要求5所述的机器学习水深反演方法,其特征在于,所述根据所述海底地形数据对海底管线的位置进行标记,并根据标记结果计算与海底管线对应的管线埋深数据,具体包括:根据所述拖鱼导航数据,实时采集拖鱼设备所接收到的磁信号变化数据;根据所述磁信号变化数据获取海底管线的海底的铺设位置数据,并在所述海底地形数据中进行标记,得到管线铺设位置图像数据;获取管线铺设位置区域的沿线泥层数据,其中,所述沿线泥层数据包括泥层厚度数据和泥层障碍物数据;根据所述泥层厚度数据和泥层障碍物数据,对所述管线埋深数据进行误差补偿处理,得到符合所述管线铺设位置图像数据的实际管线埋深数据。7.一种机器学习水深反演装置,其特征在于,所述机器学习水深反演装置包括:数据获取模块,用于获取拖鱼设备实时采集到的原始图像数据,其中,所述原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据;数据处理模块,用于对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据;数据修正模块,用于对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据;反演图像生成模块,用于根据对所述畸变补偿数据进行目标物识别,并对识别后得到的海底图据进行拼接,生成海底反演图像成果图。8.根据权利要求7所述的机器学习水深反演装置,其特征在于,所述数据处理模块具体包括:数据解码子模块,用于将所述拖鱼导航数据和拖鱼姿态数据分别进行转码处理,得到可被计算机识别的拖鱼转码数据;数据平滑处理子模块,用于对拖鱼转码数据进行数据平滑处理,得到剔除异常数据后的回波强度数据;数据量化处理子模块,用于对所述回波强度数据进行量化处理,得到回波强度量化数据;海底跟踪子模块,用于根据所述回波强度量化数据,对水体区和海底回波区之间的分界区域进行海底跟踪,得到海底跟踪数据。9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述机器学习水深反演方法的步骤。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述机器学习水深反演方法的步骤。
技术总结
本申请涉及一种机器学习水深反演方法、装置、计算机设备以及存储介质,其方法包括获取拖鱼设备实时采集到的原始图像数据,其中,所述原始图像数据包括拖鱼的拖鱼导航数据和拖鱼姿态数据,对所述拖鱼导航数据和拖鱼姿态数据进行预处理,得到海底跟踪数据,对所述海底跟踪数据进行畸变修正处理,得到畸变补偿数据,根据所述畸变补偿数据进行目标物识别,并对识别后得到的海底图像进行拼接,生成海底反演图像成果图。本申请具有通过对拖鱼采集的原始图像数据进行预处理和畸变补偿处理,来提高海底反演图像成果图与海底实际情况的拟合程度,减少图像畸变对海底图像反演结果的误差影响的效果。响的效果。响的效果。
技术研发人员:于刚 王鑫 于景华 程继国 胡云朋
受保护的技术使用者:广州三海海洋工程勘察设计有限公司
技术研发日:2022.10.25
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。