1.本技术涉及激光超声的技术领域,尤其是涉及一种基于激光超声的残余应力分布检测方法及系统。
背景技术:
2.航空航天、航海和化工等领域中的工业产品,由于原材料、结构和加工工艺等限制,在加工完成后,零部件放置或运行过程中容易在结构表面及近表面产生损伤或缺陷,这些表面缺陷一旦产生可能会造成重大的经济损伤或事故,因此,对工件表面的残余应力分布检测十分重要。
3.超声检测作为目前主要的无损检测技术之一,具有易操作、检测能力强、适用范围广等优点,但是,有些零部件的表面会进行镀层、涂层或表面粗糙,利用传统的超声表面波对样品表面的残余应力进行检测,易受到零部件表面粗糙、镀层、涂层等表面微结构的影响,使得测量零部件残余应力位置发生误差,进而使得零部件表面残余应力分布检测的结果不准确。
技术实现要素:
4.为了降低待检测工件表面粗糙、表面涂层、表面镀层、表面微结构对残余应力检测精度的影响,提高待检测工件表面残余应力检测的准确性,本技术提供一种基于激光超声的残余应力分布检测方法及系统。
5.第一方面,本技术提供一种基于激光超声的残余应力分布检测系统,采用如下的技术方案:一种基于激光超声的残余应力分布检测系统,包括:激光超声激发探测模块,用于激发和测量待检测工件用的激光;激光调制模块,用于调制所述激光超声激发探测模块激发的激光同时生成多种频率的窄带超声表面波;扫描模块,用于规划多种频率的窄带超声表面波的路径信息,所述路径信息包括扫描路径和扫描方向;机械处理模块,用于基于所述路径信息调整所述多种频率的窄带超声表面波在所述待检测工件表面的检测位置,使得所述多种频率的窄带超声表面波检测位置重合;计算模块,用于基于所述路径信息、多频窄带超声表面波的穿透深度、多频窄带超声表面波速度和声弹性原理计算所述待扫描工件亚表面的残余应力分布;所述激光超声激发探测模块均与所述机械处理模块、所述激光调制模块、所述计算模块和所述扫描模块连接。
6.通过采用上述技术方案,利用扫描模块生成扫描路径和扫描方向,使得待检测工件实现更大面积的区域的检测,降低异常工件遗漏的可能性;利用激光调制模块调制激光同时生成多种频率的窄带超声表面波,减少了多次频率扫描的空间定位精度的影响,利用
不同深度的表面波和不同深度表面波移动方向的表面波速度结合声弹性原理计算待检测工件表面的残余应力,实现对待检测工件表面残余应力分布精准控制测量,降低待检测工件表面粗糙、表面涂层、表面镀层、表面微结构对残余应力检测精度的影响,提高待检测工件表面残余应力检测的准确性。
7.可选的,所述多频窄带超声表面波为双频超声窄带表面波。
8.可选的,所述激光调制模块包括双周期光学掩模,所述双周期光学掩模包括两种周期分布的光栅;所述双周期光学掩模用于生成双频窄带超声表面波,所述双频窄带超声表面波包括高频窄带激光超声表面波和低频窄带激光超声表面波。
9.通过采用上述技术方案,利用高频激光超声表面波检测待检测工件由于表面粗糙引起的表面波速度改变,利用低频激光超声表面波检测较深的应力分布,根据高频和低频双频窄带超声表面波不同的穿透深度差分,以消除表面粗糙度对残余应力测量结果的影响,获取待检测工件表面的应力分布;两种频率的激光通过双周期光学掩模激发,不仅降低两次频率的超声表面波扫描时位置可能不一致会引起的测量误差,提高了待检测工件测量残余应力的精度,同时也降低了扫描次数,提高了测量待检测工件残余应力的速度。
10.可选的,所述激光超声激发探测模块包括激光器、振镜、干涉仪、采集卡和控制单元;所述激光器与所述控制单元连接,所述激光器的发射端与所述振镜的输入端连接;所述控制单元还依次连接所述采集卡和所述干涉仪;所述干涉仪用于探测激光器发射至待检测工件的超声表面波;所述采集卡被配置为根据所述干涉仪探测的超声表面波获取超声表面波信号,并将获取到的超声表面波信号发送至所述控制单元;所述控制单元被配置为向所述机械处理模块发送控制指令,还被配置为根据所述采集卡发送的超声信号生成检测结果。
11.可选的,所述机械处理模块包括机械臂、导光臂和机械控制器,所述机械臂与所述导光臂均匀所述机械控制器连接;所述机械臂与所述振镜、所述干涉仪和所述扫描模块连接;所述导光臂与所述激光器和所述振镜连接。
12.第二方面,本技术提供一种基于激光超声的残余应力检测方法,应用于第一方面所述的基于激光超声的残余应力分布检测系统,采用如下的技术方案:一种基于激光超声的残余应力分布检测及方法,应用于第一方面任一项所述基于激光超声的残余应力分布检测系统,包括:步骤s1,扫描模块扫描待检测工件,生成并显示所述待检测工件的扫描路径和扫描方向;步骤s2,激光超声激发探测模块发射激光;步骤s3,激光调制模块调节所述激光同时生成多频窄带超声表面波;步骤s4,按照路径信息扫描,采集所述多频窄带超声表面波沿着移动路径方向和扫描方向的表面波深度和表面波速度;步骤s5,通过所述路径信息、多频窄带超声表面波的穿透深度、多频窄带超声表面波速度和声弹性原理计算所述待扫描工件亚表面的残余应力分布。
13.通过采用上述技术方案,利用扫描模块生成扫描路径和扫描方向,使得待检测工
件实现更大面积的区域的检测,降低异常工件遗漏的可能性;利用激光调制模块调制激光同时生成多种频率的窄带超声表面波,减少了多次频率扫描的空间定位精度的影响,利用不同深度的表面波和不同深度表面波移动方向的表面波速度结合声弹性原理计算待检测工件表面的残余应力,实现对待检测工件表面残余应力分布精准控制测量,降低待检测工件表面粗糙、表面涂层、表面镀层、表面微结构对残余应力检测精度的影响,提高待检测工件表面残余应力检测的准确性。
14.可选的,所述多频窄带超声表面波为双频窄带超声表面波,所述激光调制模块调节所述激光生成多频窄带超声表面波包括:双周期光学掩模调节所述激光形成两种周期分布的光栅;调整所述两个周期分布的光栅的光栅宽度,获取高低双频窄带超声表面波。
15.通过采用上述技术方案,利用双频窄带超声表面波检测待检测工件由于表面粗糙引起的表面波速度改变和较深的应力分布,两种频率的激光通过双周期光学掩模激发,不仅降低两次频率的超声表面波扫描时位置可能不一致会引起的测量误差,提高了待检测工件测量残余应力的精度,同时也降低了扫描次数,提高了测量待检测工件残余应力的速度。
16.可选的,所述扫描模块扫描待检测工件,生成并显示所述待检测工件的待检测图像和扫描路径包括:通过双目相机扫描待检测工件,构建所述待检测工件的待检测图像;响应于用户的区域选择动作,选取待检测区域;基于所述检测区域的大小选取扫描方式,并生成扫描路径。
17.通过采用上述技术方案,根据扫描路径向激发超声表面波,实现更大面积的区域的检测,对待检测工件内边残余应力进行检测,降低异常工件遗漏的可能性。
18.可选的,所述扫描路径包括第一扫描路径和第二扫描路径,所述基于所述检测区域的大小选取扫描方式,并生成扫描路径包括:当所述扫描区域小于预设区域范围时,直接采用振镜按照预设第一扫描路径扫描;当所述扫描区域不小于预设区域范围时,建立点阵模型并自动规划第二扫描路径,其中所述点阵模型包括矩形阵列、圆形阵列和三角形阵列;控制所述机械臂按照所述第二扫描路径移动振镜至点阵,控制镜按照预设第一扫描路径扫描。
19.通过采用上述技术方案,根据待检测工件的大小选取不同的扫描方式,实现对待检测工件的快速扫描。
附图说明
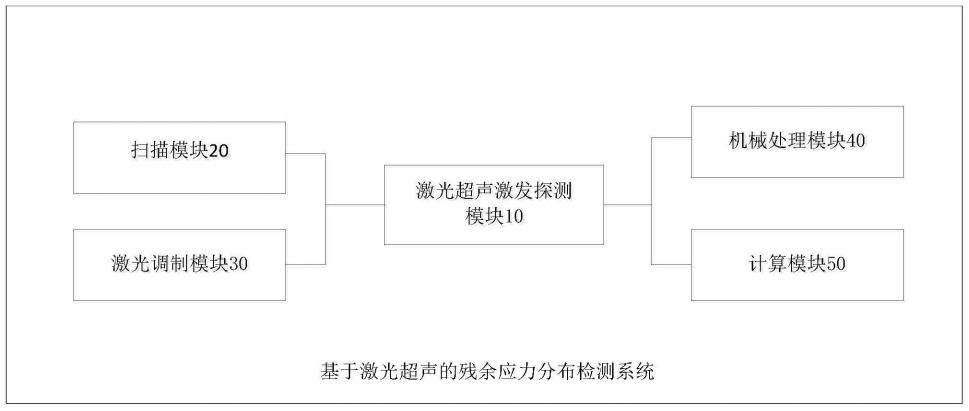
20.图1是本技术实施例基于激光超声的残余应力分布检测系统的结构框图。
21.图2是本技术实施例基于激光超声的残余应力分布检测系统的结构示意图。
22.图3是本技术实施例激光调制模块30生成双频窄带超声表面波的结构示意图。
23.图4是本技术实施例基于激光超声的残余应力分布检测方法的流程示意图。
24.图5是本技术实施例第一扫描路径的结构示意图。
25.附图说明:10、激光超声激发探测模块;101、激光器;102、振镜;103、干涉仪;104、
采集卡;105、控制单元;106、水冷机;20、扫描模块;201、双目相机;30、激光调制模块;40、机械处理模块;401、机械控制器;402、导光臂;403、机械臂;50、计算模块。
具体实施方式
26.以下结合附图对本技术作进一步详细说明。
27.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.另外,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,如无特殊说明,一般表示前后关联对象是一种“或”的关系。
29.下面结合说明书附图对本技术实施例作进一步详细描述。
30.本技术实施例提供一种激光超声的进出残余应力检测系统,如图1所示该系统包括激光超声激发探测模块10、扫描模块20、激光调制模块30、机械处理模块40和计算模块50,所述激光超声激发探测模块10均与所述机械处理模块40、所述激光调制模块30、所述计算模块50和所述扫描模块20连接。
31.其中,激光超声激发探测模块10,用于激发测量待检测工件用的超声表面波。如图2所示,激光超声激发探测模块10包括激光器101、振镜102、干涉仪103、采集卡104和控制单元105,激光器101与控制单元105连接,在本实施例中,激光器101可以为nd:yag激光器,控制单元105用于控制激光器101的工作状态;激光器101的发射端与振镜102的输入端连接,振镜102用于照射扫描待检测工件,激光器101产生的激光通过振镜102投影在待检测工件,利用激光调制模块20对激光进行调制同时生成多种频率的窄带超声表面波,本实施例中,利用激光调制模块20形成双周期热栅,生成双频窄带超声表面波;控制单元105还与采集卡104连接,采集卡104与干涉仪103连接,所述干涉仪103用于探测待检测工件的双频窄带超声表面波;所述采集卡104被配置为根据所述干涉仪103探测的双频窄带超声表面波获取超声表面波信号,并将获取到的超声表面波信号发送至所述控制单元105;所述控制单元105被配置为向所述机械处理模块40发送控制指令,还被配置为根据所述采集卡104发送的超声表面波信号生成检测结果。激光超声激发探测模块10将激光调制模块30调制的双频窄带激光超声表面波的信号检测结果发送至计算模块50,通过数据处理计算得到双频窄带激光超声表面波传播速度,进而结合声弹性理论计算待检测工件表面残余应力分布。
32.激光超声激发探测模块10进一步包括水冷机106,水冷机106分别与激光器101和控制单元105连接,用于超声表面波检测过程中对激光器101的冷却降温,降低高温环境对激光器101的工作性能及稳定性造成干扰。
33.激光调制模块30,用于调制所述激光超声激发探测模块10激发的激光同时生成多种频率的窄带超声表面波;所述多频窄带超声表面波为双频超声窄带表面波,所述激光调制模块30包括双周期光学掩模,所述双周期光学掩模包括两种周期分布的光栅;所述双周期光学掩模用于生成双频窄带超声表面波,所述双频窄带超声表面波包括高频窄带激光超声表面波和低频窄带激光超声表面波,高频窄带激光超声表面波用于检测待检测工件表面
粗糙度引起的表面速度改变,低频窄带激光超声表面波用于检测较深的应力分布。如图3所示,出示了一种激光调制模块30生成双频窄带超声表面波的结构示意图,图中粗线部分为透光部分,由子单元构成高频窄带激光超声表面波λ0,五个子单元构成低频窄带激光超声表面波λ1,即利用双周期光学掩模可在待检测工件同时生成不同入射深度的表面波,根据高频和低频双频窄带超声表面波不同的穿透深度差分,降低两次频率的超声表面波扫描时位置可能不一致引起的测量误差,以消除表面粗糙度对残余应力测量结果的影响,提高了待检测工件测量残余应力的精度,同时也降低了扫描次数,提高了测量待检测工件残余应力的速度。
34.扫描模块20,用于扫描待检测工件,构建待检测图像;还用于按照所述检测图像中选择的待检测区域规划所述激光超声激发探测模块10的路径信息,其中,路径信息包括扫描路径和扫描方向;扫描模块20包括双目相机201,双目相机201与控制单元105连接,在构建待检测图像之后,将待检测图像发送至控制单元105。
35.机械处理模块40,用于基于所述路径信息调整所述多种频率的窄带超声表面波在所述待检测工件表面的检测位置,使得所述多种频率的窄带超声表面波检测位置重合;机械处理模块40包括机械臂403、导光臂402和机械控制器401,所述机械臂403与所述导光臂402均与所述机械控制器401连接;所述机械臂403与所述振镜102、所述干涉仪103和所述扫描模块20连接;所述导光臂402与所述激光器101和所述振镜102连接。
36.机械控制器401接收控制单元105发送的机械臂403控制指令,控制机械臂403对振镜102、干涉仪103和双目镜进行移动,机械控制器401接收控制单元105的导光臂402壁控制指令,控制导光臂402对激光器101进行移动,使得激光超声激发探测模块10对待检测工件中扫面路径中的位置的超声表面波进行检查,通过机械处理模块40可以调整表面波传播方向,从而改变检测的应力方向。
37.计算模块50,用于基于所述路径信息、多频窄带超声表面波的穿透深度、多频窄带超声表面波速度和声弹性原理计算所述待扫描工件亚表面的残余应力分布;计算模块50包括算法处理平台,计算模块50接收激光超声激发探测模块10发送的超声表面波信号检测结果和扫描模块20发送的扫描路径。
38.另外,该系统还包括软件控制平台,用于实现上述模块统一的控制界面,实现激光器101、干涉仪103、导光臂402、机械臂403、双目相机201及其他外部辅助设备的控制与监控以及对待检测工件扫描路径和残余应力分布的可视化显示。
39.以上为本技术实施例中系统的介绍,下面通过方法实施例,对本技术所述的方案进行进一步说明。
40.一种基于激光超声的残余应力分布检测方法,应用于上述基于激光超声的残余应力分布检测系统,如图4所示,该方法包括:步骤s1,扫描模块20扫描待检测工件,生成并显示所述待检测工件扫描路径和扫描方向;在本实施例中,待检测工件可以包括金属、陶瓷或复合材料。
41.具体的,首先通过双目相机201扫描待检测工件,对待检测工件的形貌、位置进行测量,构建所述待检测工件的待检测图像;并将待检测图像在软件控制平台的用户显示界面进行显示。
42.其次,响应于用户的在软件控制平台的区域选择动作,选取待检测区域;用户可以通过软件控制平台的鼠标、键盘、触摸屏等方式触发区域选择按键,以产生选取待检测区触发操作,软件控制平台响应于选取待检测区触发操作,选取待检测区域。
43.之后,基于所述检测区域的大小选取扫描方式,并生成扫描路径,其中,扫描路径包括第一扫描路径和第二扫描路径。
44.当所述扫描区域小于预设区域范围时,直接采用振镜102按照预设第一扫描路径扫描;如图5所示,第一扫描路径可以采用由待检测区域中间向边缘逼近的方式,还可以采用依次横向扫描、依次纵向扫描等方式。
45.当所述扫描区域不小于预设区域范围时,将待检测区域离散为预设大小的扫描网格,再将扫描网格进一步离散化为扫面点,建立点阵模型并自动规划第二扫描路径,其中所述点阵模型包括矩形阵列、圆形阵列和三角形阵列;如果扫描区域为矩形区域,则一般划分为正方形或者矩形的区域;如果扫描区域不是非矩形区域,中心区域一般划分为正方形或者矩形的区域,边缘区域一般划分为三角形。
46.最后,机械控制单元105控制所述机械臂403按照所述第二扫描路径移动振镜102至点阵,控制振镜按照预设第一扫描路径扫描,实现对激光超声激发探测模块10的精准控制。
47.步骤s2,激光超声激发探测模块10向所述待检测区域发射激光;步骤s3,激光调制模块30调节所述激光同时生成多频窄带超声表面波;并且,激光超声激发探测模块10接收所述激光探测的双频的窄带激光超声表面波;其中,同时生成多频窄带超声表面波为双频窄带超声表面波,具体包括通过双周期光学掩模调节所述激光形成两种周期分布的光栅;调整所述两个周期分布的光栅的光栅宽度,以获取双频窄带超声表面波;步骤s4,按照规划路径扫描所述待检测区域,采集所述超声表面波沿着移动路径方向的表面波深度和表面波速度;在本实施例中,通过激光调制模块30调节激光器101发射的激光,从而在待检测工件中同时产生不同深度的超声表面波(例如λ0、λ1,其中λ0为高频窄带激光超声表面波,λ1低频窄带激光超声表面波),激光器101发射激光,通过振镜102照射在待检测工件上,机械处理模块40按照扫描路径移动振镜102,使得干涉仪103同时获得激光在扫描路径上移动方向的超声表面波λ0和λ1,干涉仪103将探测的表面波λ0和λ1的表面波信号发送至采集卡104得到超声表面波信号;采集卡104将沿着扫描路径移动方向上不同深度的超声表面波发送至控制单元105。
48.步骤s5,计算模块50通过所述路径信息、双频窄带超声表面波的穿透深度、双频窄带超声表面波速度和声弹性原理计算所述待扫描工件表面的残余应力分布。
49.在本实施例中,计算模块50接收激光超声激发探测模块10发送的不同深度的超声表面波信号检测结果和移动方向。
50.需要说明的是,表面波的波速、波长、频率的关系公式为:c=λf其中,c为超声表面波速度(m/s),λ超声表面波波长(nm),f为超声表面波频率(mhz)。
51.表面波的入射深度公式为:h=2aλ其中,h为超声表面波的入射深度(mm),α为修正系数。
52.结合声弹性原理,残余应力的计算公式为:σ-σ0=k(t-t0) 或δσ=kδt,式中:δσ
‑‑‑‑
残余应力的变化量(应力差),σ=σ-σ0,δt
‑‑‑
传播时间的变化量(声时差),t=t-tok
‑‑
应力系数,与被待检测工件的材料和探头间距有关,可通过拉伸试验标定获得。
53.在本实施例中,例如待检测工件表面同时激发波长分别为λ0、λ1的激光超声表面波,h1、h2分别为该激光超声表面波的入射深度。根据声弹性理论,即可分别待检测工件内部h1、h2的残余应力σ1、σ2。对两种频率的激光超声表面波h1、h2的残余应力进行逐差处理,即可分别得到h1、h2 h1、两个梯度深度的残余应力,分别为σ1、σ2 σ1,以此类推其它双频窄带超声表面波不同穿透深度的残余应力分布。
54.本发明提供的一种基于激光超声的残余应力分布检测方法及系统,利用扫描模块20构建并可视化待检测工件的待检测图像,根据选取的待检测区域生成扫描路径和扫描方向,利用激光调制模块30调整激光超声激发探测模块10发射的激光,从而同时形成高频和低频多种窄带激光超声,降低待检测工件表面粗糙引起的测量误差,利用表面波的不同穿透深度和表面波移动方向上的表面波速度结合声弹性原理计算待检测工件表面的残余应力分布,实现对待检测工件表面残余应力分布精准控制测量,适用于复杂曲面构件、体积小和表面粗糙的构件等,提高测量残余应力分布的精准性。
55.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的申请范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离前述申请构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中申请的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。