技术特征:
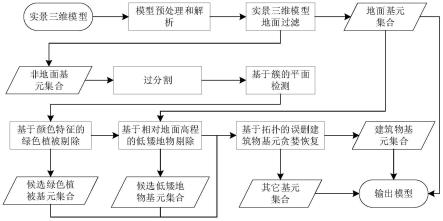
1.一种用于实景三维模型的建筑物提取方法,其特征在于,包括以下步骤:步骤1,实景三维模型预处理与解析,以将实景三维模型的所有瓦片拼接成一个的三维模型,并将实景三维模型解析为一个几何基元集合步骤2,分离实景三维模型的地面基元与非地面基元,将基元集合分离为地面基元集合和非地面基元集合步骤3,对非地面基元集合进行过分割,以将数量众多的基元聚类成一个个性质匀称、边界规整的k个簇的集合步骤4,对簇集合进行平面特征检测,从而快速生成一个个边界规整的l个平面的集合步骤5,对平面集合进行非建筑物平面贪婪剔除,剔除后得到建筑物主体结构平面集合和非建筑物平面集合步骤6,在经贪婪剔除后得到的建筑物主体结构平面集合所包含的所有基元的基础上,利用基元间的拓扑邻接关系进行贪婪恢复,以恢复在所述步骤5中被错误剔除的建筑物平面所包含的基元集合从而得到最终的顾及了完整性的建筑物基元集合从而得到最终的顾及了完整性的建筑物基元集合步骤7,输出或保存由构成的建筑物实景三维模型、由构成的非建筑物实景三维模型。2.根据权利要求1所述一种用于实景三维模型的建筑物提取建筑物提取方法,其特征在于:步骤2中采用基于面向基元的布料模拟方法分离实景三维模型的地面基元与非地面基元,具体实现方式如下;s201:将实景三维模型沿z坐标方向竖直翻转,即对集合中的所有基元的顶点的z坐标取相反值;s202:在翻转后的实景三维模型上方模拟一块由粒子构成的布料的下落,所有的构成布料的粒子的初始高度均为翻转后基元的最高点,初始水平位置由布料分辨率和实景三维模型的外包围盒确定,布料在重力的作用下缓慢下落;s203:当布料的粒子接触到实景三维模型后逐渐停止运动,布料与实景三维模型的接触通过基于射线求交的碰撞检测判断实现,若布料粒子当前竖直高度低于其与实景三维模型的碰撞点,将其设置为不可移动;s204:最终静止的布料形态近似为地形,随后计算每个基元到布料的欧式空间距离,若超过设定的阈值则将其添加到若在阈值之内则将其添加到3.根据权利要求1所述一种用于实景三维模型的建筑物提取方法,其特征在于:步骤3的具体实现方式如下;s301,综合考虑基元的空间邻近性特征、曲面特征和颜色特征,构建基元异质性距离公式d(
·
);s302,基于所述的基元异质性距离公式d(
·
),构建簇的异质性代价函数),构建簇的异质性代价函数并确定其约束条件,用于判断所有簇的异质性代价之和,式中
若r
ij
=1表示基元p
i
可表示一个簇的中心基元,且这个簇包含了所有满足r
ij
=0的非中心基元;j(r
ij
)的约束条件为其中i(
·
)是一个指数函数,k表示期待的簇的个数;d(p
i
,p
j
)表示第i个基元p
i
和第j个基元p
j
之间的异质性距离公式,n为基元的个数;s303,基于所述异质性代价函数j(
·
)及其约束条件,构建并求解能量优化函数)及其约束条件,构建并求解能量优化函数从而将实景三维模型过分割成一个性质均匀且边界规整的k个簇的集合从而将实景三维模型过分割成一个性质均匀且边界规整的k个簇的集合4.根据权利要求3所述一种用于实景三维模型的建筑物提取方法,其特征在于:基元异质性距离公式d(
·
)的计算方式如下;d(p
i
,p
j
)=μ1d
s
(p
i
,p
j
) μ2d
e
(p
i
,p
j
) μ3d
c
(p
i
,p
j
)式中,和和分别为归一化的两个基元之间的曲面特征差异距离、空间邻近性距离和颜色差异距离,μ1、μ2和μ3分别为三者对应的权重因子,三者的取值区间为[0,1];为p
i
的第q个顶点,若基元类型为三角形基元,则q最大为3,和分别为p
i
和p
j
的法向量,即p
i
和p
j
两基元之间的颜色差异距离d
c
(p
i
,p
j
)在cie lab线性色彩空间内计算,为基元p
i
在cie lab空间中的平均纹理颜色值。5.根据权利要求4所述一种用于实景三维模型的建筑物提取方法,其特征在于:使用三角形基元的三个顶点v1,v2和v3的空间坐标计算该基元的法向量:平均颜色纹理值的计算方法为:在adobe rgb色彩空间中计算基元p
i
在y方向的空间范围及扫描线条数,从上到下,对于任意一条扫描线,将基元的所有边与该扫描线求交,从左到右,将求交得到的横坐标排序,扫描线奇数次交到的边是入边,偶数次交到的边是出边;之后,插值计算在入边和出边之间的扫描线上像素的空间坐标,使用重心坐标法计算基元内部所有像素点的uv坐标,其u和v坐标分别为元内部所有像素点的uv坐标,其u和v坐标分别为其中s
a
为像素点的坐标与基元的v1和v2顶点构成的三角形的面积、s
b
为像素点与基元的v1和v3顶点构成的三角形的面积、s
c
为像素点与基元的v2和v3顶点构成的三角形的面积,u1、u2、u3、v1、v2和v3分别为v1,v2和v3的uv坐标,s
t
=s
a
s
b
s
c
;在所有uv坐标被求解后,使用uv坐标从基元对应的纹理图像中获取纹理值,并取所有纹理值的平均值作为基元的纹理值,之后将adobe rgb色彩空间转换为cie lab色彩空间。6.根据权利要求3所述一种用于实景三维模型的建筑物提取方法,其特征在于:选用自下向上的基于合并的能量最小化方法求解能量优化函数,以将中除中心基元集合外的每个基元按照映射函数将其分配到各个簇中,其
中中d(p
j
,cp
i
)为基元p
j
与基元cp
i
之间的异质性距离,并使每个基元与其分类的簇中心基元的异质性距离总体之和最小;自下向上的基于合并的能量最小化方法,具体为,首先在能量优化函数e(r
ij
)上添加正则化项,即:式中,λ是一个正则化参数,正则化参数λ的初始值设为每个基元与其相邻基元之间的最低异质性距离值的中值,之后每次迭代以两倍增长;刚开始,设置所有的基元均为簇的中心基元,不断两两自下向上合并,直至簇的数量下降为k为止。7.根据权利要求1所述一种用于实景三维模型的建筑物提取方法,其特征在于:步骤4的具体实现方式如下;s401:对簇集合选取集合中的一个簇作为一个平面s
m
的种子簇,并将该种子簇从集合簇集合中移除,其中平面s
m
是由簇集合的一个子集合构成;s401中,对集合中的每一个簇计算其质心,之后对所有的簇质心计算曲率,并按质心曲率从小到大对排序,之后从簇集合中按顺序选取种子簇;s402:计算该种子簇周围的n1个邻近簇的集合对于中的每个邻近簇,根据余弦相似性度量准则判断其是否与种子簇有相同性质,若满足余弦相似性度量准则,即似性度量准则判断其是否与种子簇有相同性质,若满足余弦相似性度量准则,即则将该邻近簇并入到种子簇所在的平面s
m
,同时从集合移除该邻近簇,若不满足余弦相似性度量准则,则不对该簇进行任何操作,式中θ为角度阈值,表示簇,d
s
表示余弦相似性度量;s403:将所述s402过程中新并入到平面s
m
的簇逐个作为平面s
m
的新的种子簇,迭代执行所述步骤s402,直至中没有簇满足余弦相似性度量准则;s404:迭代执行s401-s403过程,直至为空,保存每个迭代过中检测到的平面s
m
以构成候选平面特征集合s,对候选平面特征集合s进行后处理,移除s中簇的个数小于n2的候选平面,以剩下的候选平面作为最终的平面检测结果。8.根据权利要求1所述一种用于实景三维模型的建筑物提取方法,其特征在于:步骤5的具体实现方式如下;首先,基于颜色特征的剔除绿色植被,具体为:计算每个平面中所有基元的纹理值,并取其平均值作为该平面的纹理值,计算每个平面的过绿减过红指数:exg-exr=3g-2.4r-b,其中,r,g和b分别为该平面的颜色分量;之后,使用最大类间方差法自动计算exg-exr的最佳剔除阈值t,若平面的exg-exr大于阈值t,则将其视为绿色植被平面并将其剔除;然后,利用相对地面高程滤除低矮地物,具体为:计算步骤3中分离的地面基元集合中的每个地面基元的质心,并建立kdtree空间索引结构;计算每个平面中每个基元的相对地面高程值,即基元质心高程值与其最邻近k3个地面基元质心的平均高程值之间的差值,其k3邻近的地面基元质心通过kdtree空间索引结构检索;以一个平面内所有基元的相对地面高程的最大值作为该平面的相对地面高程值,若该平面的相对面高程值小于阈值k4,则将其视为低矮地物平面并将其剔除,剔除后得到建筑物主体结构平面集合和非建筑物平面集合9.根据权利要求1所述一种用于实景三维模型的建筑物提取方法,其特征在于:步骤6
的具体实现方式如下;对于每个搜索与其拓扑邻接的基元集合将中的基元标记为建筑物基元,即同理,对于中每个基元搜索其拓扑邻接的基元并标记为建筑物,不断递归搜索,直至中每个基元均搜索出其所有的拓扑可达的基元;其中,与p
i
拓扑邻接的基元为与p
i
共用顶点的基元,或者为与p
i
共用边的基元;为防止中存在极小部分非建筑物基元而导致的非建筑物基元被大范围误恢复,对集合在空间上对拓扑关系均匀分块,遍历基元在其所在分块上的所有拓扑可达的基元,以防止非建筑物基元被过度误恢复。10.一种用于实景三维模型的建筑物提取装置,其特征在于,包括如下模块:实景三维模型解析模块:用于输入实景三维模型,将获取的实景三维模型的所有瓦片拼接成一个的三维模型,并将实景三维模型解析为一个几何基元集合;地面过滤模块:用于输入地面过滤的参数和基元集合,将输入的基元集合分离成地面基元集合和非地面基元集合;过分割模块:用于输入过分割的参数和基元集合,将输入的基元集合聚类成一个个性质均匀、边界规整的簇的集合;平面特征检测模块:用户输入平面特征检测的参数和簇或者基元集合,将输入的簇集合或者基元集合聚类成一个个边界规整的平面集合;非建筑物平面贪婪剔除模块:用于输入贪婪剔除参数和非地面基元集合,贪婪地剔除非建筑物基元,以得到代表建筑物主体结构的集合和非建筑物平面集合;建筑物基元贪婪恢复模块:用于输入贪婪恢复的参数、代表建筑物主体结构的集合和非建筑物平面集合,基于基元间的拓扑邻接关系,对建筑物主体结构集合进行贪婪恢复,恢复在非建筑物平面贪婪剔除模块中被误删的建筑物基元,得到最终的顾及了性的建筑物基元集合;输入模块:用于输入模型保存的路径,输出建筑物实景三维模型和非建筑物实景三维模型。11.一种电子设备,包括分布式存储器、处理器以及在存储器中可在处理器中运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现如权利要求要求1至9中任一项所述一种用于实景三维模型的建筑物提取方法的步骤。12.一种计算机可读存储介质,储存有计算机软件指令,其特征在于:所述计算机软件指令实现权利要求1至9中任一项所述一种用于实景三维模型的建筑物提取方法的步骤。
技术总结
本发明公开了一种用于实景三维模型的建筑物提取方法、装置及设备,本发明首先将实景三维模型解析为一个基元集合,对基元集合进行地面基元过滤后,采用双向贪婪策略,首先对非地面集合基元进行贪婪剔除绿色植被、低矮建筑物、城市家具、汽车等非建筑物基元,以得到代表建筑物主体结构的基元集合。之后,在残缺的建筑物主体结构基础上,利用基元之间的拓扑邻接关系对误删的建筑物基元进行贪婪恢复。本发明实现了从实景三维模型中自动提取结构完整的、无基元残缺的建筑物,且具备极高的召回率以及较高的自动化程度,极大缩短了实景三维模型的对象化、单体化工作的工作量和成本。单体化工作的工作量和成本。单体化工作的工作量和成本。
技术研发人员:乐鹏 于大宇 梁哲恒 庞亚菲
受保护的技术使用者:广东南方数码科技股份有限公司
技术研发日:2022.10.08
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。