1.本发明涉及数据挖掘和物流运输调度领域,特别涉及一种考虑多行程的一车两挂甩挂接驳运输方法。
背景技术:
2.集装箱运输是一种以集装箱为单位的长途运输方式,在整个物流运输链的前段和后段发挥着重要作用。甩挂运输是带有动力的牵引车拖带装有集装箱的挂车至目的地,将挂车甩下,返回原路时将其他装好货物的挂车拖回原地,或者开往下一个目的地的运输方式。在运输过程中,牵引车和挂车可以自由分离与连接,通过运输系统之间的合理调度与配置,缩短因装卸货物而造成的牵引车停滞时间,大大提高了牵引车辆的利用率。同时,实行甩挂运输可提高原有运输能力的2倍左右,它可以充分利用牵引车缩短作业周期,从而获得最佳经济效益。为了适应和满足当今全球贸易的运输需求,甩挂运输成为了集装箱运输接驳的一种最为重要的运输手段。
3.甩挂运输的快速发展及其在集装箱接驳运输中的广泛应用,大幅度提升了车运输效率,并且产生了良好的经济效益。然而,其本身在如下方面仍存在一些不足:
4.(1)目前,对于集装箱甩挂接驳运输的研究多集中在一车一挂问题,由于一车两挂问题具有独特的属性和特点,完全不同于一车一挂问题,故构建复杂度远高于一车一挂情形,目前针对一车两挂的研究也相对较少。
5.(2)相关的集装箱接驳运输问题研究大都假设车辆在计划期内只能执行一个行程的运输服务,而多行程的运输服务可以有效减少车辆的使用数量,降低固定成本的投入。
6.(3)一车一挂尽管较传统运输的运输效率有所提高,但仍然存在运输效率不够高的情况,这就导致运输成本及能源过度消耗的现象依然存在。
7.由此可见,针对一甩一挂的集装箱接驳运输方法的进一步优化对于降低物流成本、提高物流运输效率具有重要现实意义。
技术实现要素:
8.本发明的目的在于提供一种考虑多行程的一车两挂甩挂接驳运输方法,该方法引入多种状态变量,对挂车类型和数量进行刻画,解决多行程的构建问题,并基于状态变量构建非线性混合整数规划模型。针对非线性模型无法被直接求解的问题,对模型进行线性化处理,构建线性混合整数规划模型进行求解。该方法对于牵引车的挂车数量及执行运输任务的行程进行优化,提高集装箱甩挂接驳运输效率,降低运输成本。
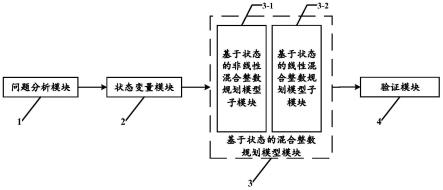
9.本发明是这样实现的:一种考虑多行程的一车两挂甩挂接驳运输方法包括如下模块:问题分析模块、状态变量模块、基于状态的混合整数规划模型模块、验证模块。其所述基于状态的混合整数规划模型模块包括:基于状态的非线性混合整数规划模型子模块、基于状态的线性混合整数规划模型子模块。
10.所述问题分析模块和状态变量模块相连,状态变量模块和基于状态的混合整数规
划模型模块相连,基于状态的混合整数规划模型模块和验证模块相连;基于状态的混合整数规划模型模块中,基于状态的非线性混合整数规划模型子模块和基于状态的线性混合整数规划模型子模块相连。
11.所述问题分析模块,对相关问题进行描述,确定拟解决问题目标。研究了考虑一车两挂甩挂接驳运输问题,牵引车可以拖带任意类型和数量的挂车,在不超过一车两挂限制的基础上,在一个运输任务周期内尽可能的执行多个行程的运输服务,以实现成本最小化。
12.所述状态变量模块,与一车一挂模式对比,分析所研究问题的难点,引入多种状态变量对挂车类型和数量进行刻画,解决行程的构建问题。
13.所述基于状态的混合整数规划模型模块包括基于状态的非线性混合整数规划模型子模块和基于状态的线性混合整数规划模型子模块,用于对集装箱甩挂接驳运输问题求解。
14.所述基于状态的非线性混合整数规划模型子模块中,构建基于状态的非线性混合整数规划模型(state-based mixed-integer non-linear programming model,模型sb-minlp),通过在建立模型中引入状态变量,对多行程一车两挂问题进行求解。
15.所述基于状态的线性混合整数规划模型子模块中,针对非线性模型无法被直接求解的问题,对模型进行线性化处理,构建基于状态的线性混合整数规划模型(state-based mixed-integer linear programming model,模型sb-milp)。
16.所述验证模块,针对本发明所提出的sb-milp模型进行验证,通过与一车一挂甩挂运输模式对比,探索一车两挂甩挂运输在可拖带的挂车数量增加一个的情况下,运输效率以及运输成本的变化情况。
17.本发明具有以下优点:
18.(1)一车两挂甩挂运输相比一车一挂,在使用相同数量的牵引车情况下,增加了挂车数量,使得牵引车可以在单个行程内进行更多的运输服务,提高运输效率。
19.(2)多行程运输允许车辆在一个计划期内多次往返于客户和堆场之间进行运输作业,让车辆执行多行程运输服务,可以有效减少车辆的使用数量,降低固定成本的投入。
20.(3)本发明提出的sb-milp模型,针对非线性模型无法被直接求解的问题,对模型进行线性化处理,提高了模型的求解能力。
附图说明
21.图1为本发明实施例的模块结构示意图。
22.图中标记:1.问题分析模块;2.状态变量模块;3.基于状态的混合整数规划模型模块;4.验证模块;3-1.基于状态的非线性混合整数规划模型子模块;3-2.基于状态的线性混合整数规划模型子模块。
具体实施方式
23.实施例:
24.如图1所示,本发明提供了一种考虑多行程的一车两挂甩挂接驳运输方法,包含4个主模块,2个子模块,分别为:问题分析模块1、状态变量模块2、基于状态的混合整数规划模型模块3、验证模块4。其中基于状态的混合整数规划模型模块3包括:基于状态的非线性
混合整数规划模型子模块3-1、基于状态的线性混合整数规划模型子模块3-2。
25.所述问题分析模块1用于确定一车两挂甩挂接驳运输拟解决问题目标。该问题可描述为:
26.卡车公司有牵引车和挂车,负责集装箱接驳运输业务。一辆牵引车可以同时拖带两个挂车,牵引车和挂车可分离,在不超过可拖带的挂车数量限制的情况下,牵引车可以拖带任意类型和数量的挂车。每辆挂车上装载有一个集装箱,两者始终作为一个整体存在。挂车分为三类:装载进口货物的挂车(简称进口重挂)、装载出口货物的挂车(简称出口重挂)和空载的挂车(简称空挂)。有一组集合为i的进口任务和一组集合为o的出口任务需要由卡车公司来完成,每个任务包含一个第一阶段子任务和一个第二阶段子任务。记进口任务的第一和第二阶段子任务集合分别为i1和i2,记出口任务的第一和第二阶段子任务集合分别为o1和o2。进口第一阶段子任务要求从堆场为其对应的进口商送去一个进口重挂,第二阶段子任务则要求在集装箱被腾空以后,将空挂拖回堆场,或运至出口商。出口第一阶段子任务要求为其对应的出口商送去一个空挂,第二阶段子任务则要求在货物装载结束后,将出口重挂拖回堆场。
27.将牵引车返回或离开堆场视为一个虚拟子任务,记为0。牵引车在任意子任务位置i和j间行驶时间为τ
ij
。0对应的位置为堆场,进口子任务对应的位置为其进口商,出口子任务对应的位置为其出口商。任意三个子任务i、j和k之间,满足τ
ij
τ
jk
》τ
ik
。子任务i∈i1∪o1的集装箱装卸时间为pi,子任务i∈i2∪o2无集装箱装卸操作。
28.牵引车可以执行多个行程的运输任务,每个行程是指牵引车从堆场出发,执行若干运输子任务,然后返回堆场。牵引车返回堆场后将所有挂车甩下,恢复其最大拖带能力,以便在后续运输服务中可以一次性完成尽可能多的任务。
29.问题的目标是在运输计划期,0,h]内,以最小的总运输成本完成所有运输任务。总运输成本由牵引车固定使用成本和进行运输作业的行驶成本组成。该问题可描述为图g=(n,a)。其中,n=i1∪i2∪o1∪o2∪{0}为节点集合,a={(i,j)|i∈n,j∈n,i≠j}\{(δ(j),j)|j∈i1∪o1}为弧集。其中,δ(j)表示第一阶段子任务j对应的第二阶段子任务。
30.所述状态变量模块2通过引入状态变量对挂车类型和数量进行刻画,解决行程的构建问题。
31.为方便后续构建模型,将本发明提出模型所用到的集合、符号和参数进行统一说明,如表1所示:
32.表1相关参数说明
[0033][0034]
牵引车可以同时拖带多种类型、多数量的挂车,且只会在子任务节点处甩下或者挂上一个特定类型的挂车。所以,当牵引车离开节点时,除甩下或挂上的挂车对应的类型外,其余类型的挂车数量不会发生变化。另外,牵引车访问两个节点的方式有直接访问和经由堆场间接访问两种方式,不同的访问方式对应不同的挂车数量变化情况,两种访问方式下挂车数量变化情况如表2所示,为数学模型的构建提供支撑。
[0035]
表2直接访问和间接访问情形下挂车数量变化情况
[0036][0037]
所述基于状态的混合整数规划模型模块3包括基于状态的非线性混合整数规划模型子模块3-1、基于状态的线性混合整数规划模型子模块3-2,用于对集装箱甩挂接驳运输问题求解。
[0038]
所述基于状态的非线性混合整数规划模型子模块3-1通过引入状态变量和决策变量来构建非线性混合整数规划模型。
[0039]
牵引车在访问进口第一阶段子任务节点时可以拖带两个进口重挂,一个进口重挂,也可能不拖带进口重挂。在前两种情形下,牵引车可以直接访问对应的子任务节点,而在后一种情形中,牵引车首先需要返回堆场进行相关甩挂操作,然后再次从堆场出发,访问对应的子任务节点。在两种不同的情形中,挂车数量变化方式不同。针对进口重挂的上述三种情形,引入如下三种状态变量:
[0040][0041][0042]
[0043]
同一时刻,牵引车就进口重挂的状态只能是和三种状态中的一种。
[0044]
针对空挂,引入如下三种状态变量:
[0045][0046][0047][0048]
同一时刻,牵引车就空挂的状态也只能是和三种状态中的一种。
[0049]
针对所有类型挂车,引入如下状态变量:
[0050][0051]
以上引入的状态变量在数学模型中充当辅助变量。除此之外,引入如下决策变量:
[0052][0053]
牵引车在弧(i,j)∈a上行驶时拖带的进口重挂数量。
[0054]
牵引车在弧(i,j)∈a上行驶时拖带的出口重挂数量。
[0055]
牵引车在弧(i,j)∈a上行驶时拖带的空挂数量。
[0056]
zi:牵引车开始服务节点i∈n\{0}的时间。
[0057]
t
ij
:牵引车在弧(i,j)∈a,i≠0,j≠0上的转换时间。
[0058]
目标函数最小化总运输成本(牵引车固定使用成本和运输作业行驶成本),非线性混合整数规划模型的目标函数如下所示:
[0059]
minα1∑
j∈n\*0}
x
0j
α2∑
i∈n\*0}
∑
j∈n\*0}\*i}
t
ij
α2(∑
i∈n\*0}
τ
0i
x
0i
∑
i∈n\{0}
τ
i0
x
i0
)
ꢀꢀ
公式(1)
[0060]
目标函数(1)最小化总运输成本,包括牵引车固定使用成本和运输作业行驶成本。其中,∑
j∈n\{0}
x
0j
是使用的牵引车数量,α1是单个牵引车固定使用成本,∑
i∈n\{0}
∑
j∈n\*0}\*i}
t
ij
是牵引车在非出发和返回弧上的总行驶时间,∑
i∈n\*0}
τ
0i
x
0i
和∑
i∈n\*0}
τ
i0
x
i0
分别是牵引车在出发和返回弧上的总行驶时间,α2是牵引车单位行驶时间成本。
[0061]
非线性混合整数规划模型的基本约束如下所示:
[0062][0063][0064][0065][0066]
公式(2)保证每一个子任务节点被访问一次,其中,代表弧(i,j)∈a。公式
(3)实现输入流和输出流的平衡,保证牵引车访问节点j后离开该节点,其中,代表弧(j,k)∈a。公式(4)限定牵引车可同时拖带的挂车总数量。公式(5)保证牵引车返回堆场时不拖带进口重挂,离开堆场时不拖带出口重挂,其中代表在返回弧(0,i)∈a上行驶时拖带的进口重挂数量,代表在出发弧(0,i)∈a上行驶时拖带的出口重挂数量。
[0067]
开始服务时间约束如下所示:
[0068][0069][0070][0071]
公式(6)对牵引车先后访问的两个节点的开始服务时间建立关系,保证开始服务时间的连续性,其中,m是足够大的正数。公式(7)限定服务开始时间的范围。τ
0i
是牵引车对节点的最早开始服务时间,该时间不早于牵引车从堆场行驶到该节点位置的时间。h-τ
i0
是最晚开始服务时间,该时间保证牵引车可以在计划期结束前返回堆场,h代表计划期长度。公式(8)对同一任务的两个子任务建立开始服务时间关系,其中,δ(i)表示第一阶段子任务节点i∈i1∪o1对应的第二阶段子任务节点。
[0072]
状态变量约束公式如下所示:
[0073][0074][0075][0076][0077][0078][0079]
公式(9)-(11)建立针对进口重挂数量的状态变量。当牵引车在弧(i,j)∈a上行驶,且没有拖带进口重挂,即x
ij
=1,时,由公式(9)可得相反,当时,不等式左半部分小于等于0,而右半部分小于等于0.5。结合的范围,可得按照类似方式,当x
ij
=1,时,由公式(10)可得而当时,可得当x
ij
=1时,公式(11)变成表示牵引车在弧(i,j)∈a上针对进口重挂只有一种状态。所以,当时,而当时,如此,便可用于表示牵引车是否拖带一个进口重挂的状态。公式(12)-(14)分别建立针对空挂数量的状态变量和
[0080]
进口重挂数量约束如下所示:
[0081]
[0082][0083][0084]
公式(16)保证牵引车从堆场出发对进口第一阶段子任务进行服务时拖带进口重挂,x
0i
表示牵引车在堆场0和子任务i的出发弧上,表示牵引车在弧(0,i)∈a上行驶时拖带的进口重挂数量。对于公式(17),牵引车在访问节点j∈o1前,如果没有拖带空挂,即则需要先返回堆场拖带空挂。牵引车在离开堆场时只拖带空挂,所以牵引车离开节点j∈o1时拖带的进口重挂数相反,进口重挂数量不变,即公式(18)描述牵引车访问节点j∈i2∪o2时进口重挂数量变化情况。当时,牵引车需要返回堆场甩下所有挂车,空牵引车离开堆场,所以牵引车离开节点j∈i2∪o2时拖带的进口重挂数为0。相反,当时,进口重挂数量保持不变。
[0085]
出口重挂数量约束如下所示:
[0086][0087][0088][0089]
出口重挂需要从出口商处运至堆场,所以牵引车离开堆场时不会拖带出口重挂。基于此事实,当或时,即当牵引车返回堆场后重新离开堆场时,由公式(19)-(21)可得,牵引车离开节点j∈i1∪o1∪i2时拖带的出口重挂数为0,即而当或时,牵引车拖带的出口重挂数保持不变。
[0090]
空挂数量约束如下所示:
[0091][0092][0093][0094][0095]
公式(22)确保在时,在时,公式(23)保证牵引车访问出口第一阶段子任务时拖带着空
挂。
[0096]
当时。公式(24)保证牵引车在访问节点j∈i2后拖带的空挂数量为1,而在时,保证牵引车拖带的空挂数量加1。公式(25)保证在时即不拖带空挂,在时空挂数量保持不变。
[0097]
所述基于状态的线性混合整数规划模型子模块3-2针对常用的求解器无法求解子模块3-1所提出的非线性数学模型的问题,对模型的非线性约束进行线性化处理,构建基于状态的线性混合整数规划模型(state-based mixed-integer linear programming model,模型sb-milp),描述如下:
[0098]
对非线性约束公式(17)-(22)、(24)和(25)进行线性化。其中,公式(17)可以线性化为:
[0099][0100][0101]
当时,即牵引车没有拖带空挂时,公式(30)变成时,即牵引车没有拖带空挂时,公式(30)变成结合的变量范围,可得相反,当时,公式(30)变成结合公式(29),可得
[0102]
按照类似原理,可对其他非线性约束进行如下线性化操作:
[0103][0104][0105][0106][0107][0108][0109][0110][0111]
最终,目标函数(1)、公式(2)-(16)、(23)-(25)和线性化的(26)-(35)构成所谓的基于状态的线性混合整数规划模型(state-based mixed-integer linear programming model,模型sb-milp)。
[0112]
所述验证模块4针对本发明所提出的sb-milp模型进行验证,通过与一车一挂甩挂
运输模式对比,探索一车两挂甩挂运输在可拖带的挂车数量增加一个的情况下,运输效率以及运输成本的变化情况。
[0113]
实验所用算例名称形式为r#-d,其中,r表示随机算例,#为算例编号,d表示一车两挂。本模块基于算例r1-d至r16-d进行实验,通过与一车一挂甩挂运输模式对比,探索一车两挂甩挂运输在可拖带的挂车数量增加一个的情况下,运输效率以及运输成本的变化情况。
[0114]
实验程序使用的编程语言为c ,相关的实验在配置为pentium(r)dual-core 2.10ghz,2.00gb ram的电脑上进行。采用visual studio 2010调用cplex(12.6.1版本,32位)的方式进行数学模型的求解测试,其中,cplex采用深度优先搜索策略,以避免过快出现内存不足现象,每个算例的求解时间设定为3600秒。设定计划期长度h=16小时,每辆牵引车的固定使用成本,α1=10/个,牵引车的单位时间行驶成本α2=1/小时。
[0115]
使用模型sb-milp求解测试算例,将其结果与一车一挂甩挂研究结果进行对比。表3列出了关于牵引车使用数量和总运输成本的信息。结果显示,在使用相同数量的牵引车情况下,一车两挂模式的行驶时间普遍少于一车一挂模式的行驶时间。行驶时间减少量普遍大于13%。相比一挂模式,行驶时间的平均节约量为27.16%。这是因为,在可拖带的挂车数量增加后,单个牵引车的装载容量增加,牵引车可以在单个行程内进行更多的运输服务,避免了频繁返回堆场进行甩挂作业。基于此,两挂模式的总运输成本也普遍低于一车一挂运输成本。最大和最小的运输成本降幅分别为22.32%(算例r3-d)和5.98%(算例r12-d)。运输成本的平均降幅达到13.40%。以上结果表明,一车两挂甩挂运输可在一车一挂甩挂运输的基础上,进一步降低运输成本。
[0116]
表3一车两挂甩挂运输与一车一挂甩挂运输对比
[0117][0118]
综上,本发明涉及的一种考虑多行程的一车两挂甩挂接驳运输方法,该方法对于牵引车的挂车数量及执行运输任务的行程进行优化,提高集装箱甩挂接驳运输效率,降低运输成本。在使用相同数量的牵引车情况下,增加了挂车数量,使得牵引车可以在单个行程内进行更多的运输服务,提高运输效率。同时,考虑多行程运输,以有效减少车辆的使用数
量,降低固定成本的投入。
[0119]
对所公开的实施例的所述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。