1.本发明属于人工浮鱼礁锚泊技术领域,特别涉及一种人工浮鱼礁锚泊装置及其布设方法。
背景技术:
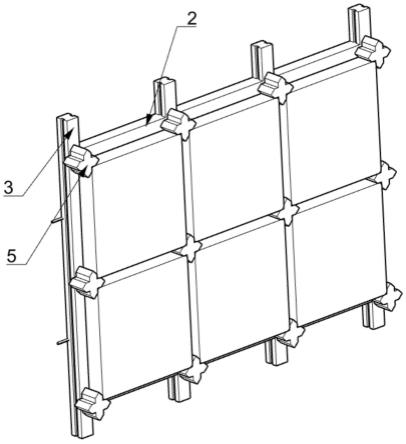
2.人工浮鱼礁是人为在海中设置的构造物,其目的是改善海域生态环境,营造海洋生物栖息的良好环境,为鱼类等提供繁殖、生长、索饵和庇敌的场所,达到保护、增殖和提高渔获量的目的,是通过锚泊于海底浮体及悬链的支撑而漂浮于海面的构造物。
3.目前,公开号为:cn109197723b的中国发明公开了一种牵拉式分层式人工柔性浮鱼礁,此发明公开了一种牵拉式分层式人工柔性浮鱼礁,包括由锚绳串接的浮球,浮球下方的锚绳上套设有铁环,铁环上下分别设有相对面相斥设置的磁铁a与磁铁b,铁环一端通过锚绳牵拉主缆绳,主缆绳上部分均布有浮鱼礁,主缆绳下部分串接有配重块,锚绳下端固定连接锚块,通过在锚绳下端采用锚块锚泊,上端串接浮球,使锚块上固定一串浮球串,浮球串自身就是一种良好的人工浮鱼礁,再牵拉一组框架式浮鱼礁,使得浮鱼礁整体牢固性性加大,进而提高安全性能,且投放便易,在铁环上下分别设置的相对面相斥设置的磁铁a与磁铁b,可以对铁环产生吸力,并通过铁环对浮鱼礁的沉浮高度进行限定,此装置,结构简单,经济环保,具有普及性、可群体投放性强。
4.现有的人工浮鱼礁锚泊装置在布设的时候有以下缺点:
5.1、不便于对大型人工浮鱼礁进行锚泊,人工对锚泊的位置精测困难,锚泊的位置无法精确到达指定位置;
6.2、同一种锚具无法同时用于泥沙海床和礁石海床。
技术实现要素:
7.本发明的目的在于针对现有的一种人工浮鱼礁锚泊装置及其布设方法,其优点是:
8.1、便于对大型人工浮鱼礁进行锚泊,可以进行无人精确锚泊;
9.2、该锚具可以同时用于泥沙海床和礁石海床。
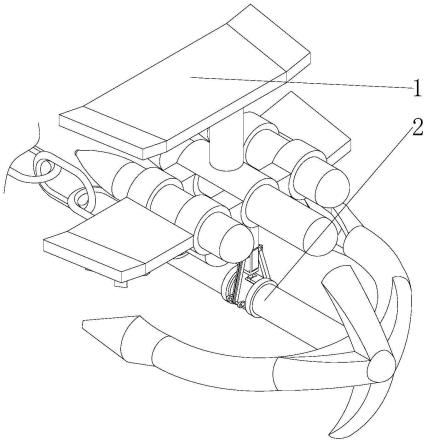
10.本发明的上述技术目的是通过以下技术方案得以实现的:一种人工浮鱼礁锚泊装置,包括运送机构、锚泊机构和控制系统,所述锚泊机构卡接在运送机构的底部,所述运送机构包括探测组件、投放组件、推进组件、转向组件和平衡组件,所述锚泊机构包括支撑组件和限位组件,所述投放组件栓接在探测组件的前侧,所述推进组件栓接在探测组件的后侧,所述转向组件栓接在探测组件的两侧,所述平衡组件栓接在探测组件的顶部,所述支撑组件卡接在投放组件的底部,所述限位组件栓接在支撑组件的前侧。
11.采用上述技术方案,通过设置运送机构可以在水中将锚泊机构运送到指定位置,增加了锚泊操作的精准性,锚泊机构可以同时应对泥沙海床和礁石海床,增加了锚泊时的稳定性,控制系统可以远程操控运送机构的行动轨迹,增加了锚泊操作的可控性。
12.本发明进一步设置为:所述探测组件包括气囊组、防水蓄电池、防水摄像头和信息中转器,所述防水蓄电池栓接在气囊组的底部,所述防水摄像头栓接在气囊组的底部,所述信息中转器单向电性连接在防水蓄电池的底部。
13.采用上述技术方案,通过设置探测组件,气囊组的浮力与锚泊机构的重力相同,可以抵消锚泊机构的重力,让运送机构漂浮在水中,在将锚泊机构放在指定位置后,气囊组会因为自身浮力将运送机构送到水面,以供人回收,并且防水摄像头可以对水中的情况进行实时录像,并将录像后的信息传输到控制系统中处理,再将处理后的信息传输到外用计算设备内供人参考,便于对水中的情况进行观察。
14.本发明进一步设置为:所述投放组件包括前框架、防水机械夹和防滑垫圈,所述前框架栓接在气囊组表面的前侧,所述防水机械夹栓接在前框架的底部,所述防滑垫圈栓接在防水机械夹的内壁。
15.采用上述技术方案,通过设置投放组件,防水机械夹可以将锚泊机构抓握,并且在运送机构抵达指定位置后,经确认后松开锚泊机构,便于运输锚泊机构,并且防滑垫圈可以增加防水机械夹抓握锚泊机构时的稳定性。
16.本发明进一步设置为:所述推进组件包括后框架、主潜水推进器和主导流板,所述后框架栓接在气囊组表面的后侧,所述主潜水推进器栓接在后框架的底部,所述主导流板栓接在主潜水推进器的两侧。
17.采用上述技术方案,通过设置推进组件,主潜水推进器可以将运送机构在水中快速推动,并且主导流板可以增加主潜水推进器在推动时的稳定性。
18.本发明进一步设置为:所述转向组件包括副导流板、导流斜板和副潜水推进器,所述副导流板栓接在气囊组的两侧,所述导流斜板焊接在副导流板远离气囊组的一侧,所述副潜水推进器栓接在副导流板的底部。
19.采用上述技术方案,通过设置转向组件,副潜水推进器可以改变运送机构移动的方向,导流斜板和副导流板可以增加运送机构移动时的稳定性。
20.本发明进一步设置为:所述平衡组件包括支撑杆、尾翼和斜面翼,所述支撑杆栓接在气囊组的顶部,所述尾翼栓接在支撑杆的顶部,所述斜面翼焊接尾翼的两侧。
21.采用上述技术方案,通过设置平衡组件,斜面翼和尾翼能够大幅增加运送机构在水中推进的稳定性,并且与副导流板配合可以有效避免水中波流带来的意外位移。
22.本发明进一步设置为:所述支撑组件包括锚冠、锚杆和卡环,所述卡环的表面与防水机械夹的内壁卡接,所述锚杆焊接在卡环的内壁,所述锚冠焊接在锚杆的后侧。
23.采用上述技术方案,通过设置支撑组件,卡环可以增加投放组件在抓握锚杆时的稳定性,避免投放组件在抓握锚杆时发生意外位移。
24.本发明进一步设置为:所述限位组件包括锚臂、锚爪和十字副锚,所述锚臂焊接在锚杆的前侧,所述锚爪焊接在锚臂的两侧,所述十字副锚栓接在锚臂的前侧。
25.采用上述技术方案,通过设置限位组件,锚臂和锚爪可以在泥沙海床进行锚泊,锚爪能够铲入泥沙中将锚臂固定,十字副锚可以稳定的卡在礁石之间,能够同时对泥沙海床和礁石海床进行锚泊。
26.本发明进一步设置为:所述控制系统包括控制终端、供电模块、探测模块、推进模块、转向模块和投放模块,所述控制终端与供电模块单向电性连接,所述控制终端与探测模
块单向电性连接,所述推进模块与控制终端单向电性连接,所述转向模块与控制终端单向电性连接,所述投放模块与控制终端单向电性连接。
27.采用上述技术方案,通过设置控制系统,供电模块可以为控制系统整体提供电力,供电模块为防水蓄电池,控制终端能够分别对探测模块、推进模块、转向模块和投放模块进行操控,控制终端为信息中转器,探测模块可以对海中的情况进行探测,探测模块为防水摄像头,推进模块可以将运送机构推动,推进模块为主潜水推进器,转向模块可以改变运送机构的前进方向,转向模块为副潜水推进器,投放模块可以将锚泊机构放置在指定位置,投放模块为防水机械夹。
28.一种人工浮鱼礁锚泊装置的布设方法,包括以下步骤:
29.s1.运送锚到指定位置:将锚泊机构安装在运送机构的投放组件上,将运送机构放在水中并启动,使用控制系统操纵运送机构将锚泊机构运送到指定位置即可;
30.s2.放置锚并加固:使用控制系统操纵运送机构,让投放组件将锚泊机构放置在指定位置后,拉动锚泊机构并使用探测组件观察锚泊机构是否卡牢在海床上即可。
31.综上所述,本发明具有以下有益效果:
32.1、通过设置运送机构和控制系统,可以通过外用计算设备,来远程操纵控制系统控制运送机构在水中的移动方式,探测组件可以将在水中捕捉到的景象远程投射到外用计算设备供人观察,再通过推进组件和转向组件将运送机构移动到指定位置,达到了远程控制运送机构的作用,并且平衡组件可以让运送机构的移动保持平衡,再通过投放组件将锚泊机构投放到指定位置,达到了远程锚泊的效果;
33.2、通过设置锚泊机构,支撑组件可以与外用锚链连接,可以将锚泊机构与人工浮鱼礁连接,并且可以增加投放组件与支撑组件连接的稳定性,限位组件可以分别在泥沙海床和礁石海床固定,增加了锚泊的途径。
附图说明
34.图1是本发明的整体结构示意图;
35.图2是本发明的运送机构结构示意图;
36.图3是本发明的探测组件结构示意图;
37.图4是本发明的投放组件结构示意图;
38.图5是本发明的推进组件结构示意图;
39.图6是本发明的转向组件结构示意图;
40.图7是本发明的平衡组件结构示意图;
41.图8是本发明的支撑组件和限位组件结构示意图;
42.图9是本发明的控制系统图;
43.图10是本发明的布设方法图。
44.附图标记:1、运送机构;101、探测组件;1011、气囊组;1012、防水蓄电池;1013、防水摄像头;1014、信息中转器;102、投放组件;1021、前框架;1022、防水机械夹;1023、防滑垫圈;103、推进组件;1031、后框架;1032、主潜水推进器;1033、主导流板;104、转向组件;1041、副导流板;1042、导流斜板;1043、副潜水推进器;105、平衡组件;1051、支撑杆;1052、尾翼;1053、斜面翼;2、锚泊机构;201、支撑组件;2011、锚冠;2012、锚杆;2013、卡环;202、限
位组件;2021、锚臂;2022、锚爪;2023、十字副锚;3、控制系统;301、控制终端;302、供电模块;303、探测模块;304、推进模块;305、转向模块;306、投放模块。
具体实施方式
45.以下结合附图对本发明作进一步详细说明。
46.实施例1:
47.参考图1-9,一种人工浮鱼礁锚泊装置,包括运送机构1和控制系统3,运送机构1包括探测组件101、投放组件102、推进组件103、转向组件104和平衡组件105,投放组件102栓接在探测组件101的前侧,推进组件103栓接在探测组件101的后侧,转向组件104栓接在探测组件101的两侧,平衡组件105栓接在探测组件101的顶部,通过设置运送机构1和控制系统3,可以通过外用计算设备,来远程操纵控制系统3控制运送机构1在水中的移动方式,探测组件101可以将在水中捕捉到的景象远程投射到外用计算设备供人观察,再通过推进组件103和转向组件104将运送机构1移动到指定位置,达到了远程控制运送机构1的作用,并且平衡组件105可以让运送机构1的移动保持平衡,再通过投放组件102将锚泊机构2投放到指定位置,达到了远程锚泊的效果。
48.如图3所示,探测组件101包括气囊组1011、防水蓄电池1012、防水摄像头1013和信息中转器1014,防水蓄电池1012栓接在气囊组1011的底部,防水摄像头1013栓接在气囊组1011的底部,信息中转器1014单向电性连接在防水蓄电池1012的底部,通过设置探测组件101,气囊组1011的浮力与锚泊机构2的重力相同,可以抵消锚泊机构2的重力,让运送机构1漂浮在水中,在将锚泊机构2放在指定位置后,气囊组1011会因为自身浮力将运送机构1送到水面,以供人回收,并且防水摄像头1013可以对水中的情况进行实时录像,并将录像后的信息传输到控制系统3中处理,再将处理后的信息传输到外用计算设备内供人参考,便于对水中的情况进行观察。
49.如图4所示,投放组件102包括前框架1021、防水机械夹1022和防滑垫圈1023,前框架1021栓接在气囊组1011表面的前侧,防水机械夹1022栓接在前框架1021的底部,防滑垫圈1023栓接在防水机械夹1022的内壁,通过设置投放组件102,防水机械夹1022可以将锚泊机构2抓握,并且在运送机构1抵达指定位置后,经确认后松开锚泊机构2,便于运输锚泊机构2,并且防滑垫圈1023可以增加防水机械夹1022抓握锚泊机构2时的稳定性。
50.如图5所示,推进组件103包括后框架1031、主潜水推进器1032和主导流板1033,后框架1031栓接在气囊组1011表面的后侧,主潜水推进器1032栓接在后框架1031的底部,主导流板1033栓接在主潜水推进器1032的两侧,通过设置推进组件103,主潜水推进器1032可以将运送机构1在水中快速推动,并且主导流板1033可以增加主潜水推进器1032在推动时的稳定性。
51.如图6所示,转向组件104包括副导流板1041、导流斜板1042和副潜水推进器1043,副导流板1041栓接在气囊组1011的两侧,导流斜板1042焊接在副导流板1041远离气囊组1011的一侧,副潜水推进器1043栓接在副导流板1041的底部,通过设置转向组件104,副潜水推进器1043可以改变运送机构1移动的方向,导流斜板1042和副导流板1041可以增加运送机构1移动时的稳定性。
52.如图7所示,平衡组件105包括支撑杆1051、尾翼1052和斜面翼1053,支撑杆1051栓
接在气囊组1011的顶部,尾翼1052栓接在支撑杆1051的顶部,斜面翼1053焊接尾翼1052的两侧,通过设置平衡组件105,斜面翼1053和尾翼1052能够大幅增加运送机构1在水中推进的稳定性,并且与副导流板1041配合可以有效避免水中波流带来的意外位移。
53.如图8所示,控制系统3包括控制终端301、供电模块302、探测模块303、推进模块304、转向模块305和投放模块306,控制终端301与供电模块302单向电性连接,控制终端301与探测模块303单向电性连接,推进模块304与控制终端301单向电性连接,转向模块305与控制终端301单向电性连接,投放模块306与控制终端301单向电性连接,通过设置控制系统3,供电模块302可以为控制系统3整体提供电力,供电模块302为防水蓄电池1012,控制终端301能够分别对探测模块303、推进模块304、转向模块305和投放模块306进行操控,控制终端301为信息中转器1014,探测模块303可以对海中的情况进行探测,探测模块303为防水摄像头1013,推进模块304可以将运送机构1推动,推进模块304为主潜水推进器1032,转向模块305可以改变运送机构1的前进方向,转向模块305为副潜水推进器1043,投放模块306可以将锚泊机构2放置在指定位置,投放模块306为防水机械夹1022。
54.使用过程简述:将锚泊机构2安装在防水机械夹1022上,再将气囊组1011放置在水中,防水蓄电池1012会为控制系统3供电,之后再用外用计算设备对控制终端301下达指令,控制终端301会分别对探测模块303、推进模块304、转向模块305和投放模块306发出指令,推进模块304会启动主潜水推进器1032,将气囊组1011向前推动,转向模块305会启动副潜水推进器1043,让副潜水推进器1043来调整气囊组1011的前进方向,将气囊组1011的移动方向修正为目标位置,探测模块303会启动防水摄像头1013,防水摄像头1013可以将水中的情况实时录像,并将图像信息传输到信息中转器1014中,信息中转器1014会将信息远程传输到外用计算设备中供人参考,在气囊组1011移动到指定位置后,投放模块306会启动防水机械夹1022,将锚泊机构2松开,让锚泊机构2下落到指定位置即可,之后气囊组1011会因为失去锚泊机构2的重量而向水面上浮,在运送机构1浮在水面上时,使用者可以将运送机构1回收利用。
55.实施例2:
56.参考图1-8,一种人工浮鱼礁锚泊装置,包括锚泊机构2,锚泊机构2卡接在运送机构1的底部,锚泊机构2包括支撑组件201和限位组件202,支撑组件201卡接在投放组件102的底部,限位组件202栓接在支撑组件201的前侧,通过设置锚泊机构2,支撑组件201可以与外用锚链连接,可以将锚泊机构2与人工浮鱼礁连接,并且可以增加投放组件102与支撑组件201连接的稳定性,限位组件202可以分别在泥沙海床和礁石海床固定,增加了锚泊的途径。
57.如图8所示,支撑组件201包括锚冠2011、锚杆2012和卡环2013,卡环2013的表面与防水机械夹1022的内壁卡接,锚杆2012焊接在卡环2013的内壁,锚冠2011焊接在锚杆2012的后侧,通过设置支撑组件201,卡环2013可以增加投放组件102在抓握锚杆2012时的稳定性,避免投放组件102在抓握锚杆2012时发生意外位移。
58.如图8所示,限位组件202包括锚臂2021、锚爪2022和十字副锚2023,锚臂2021焊接在锚杆2012的前侧,锚爪2022焊接在锚臂2021的两侧,十字副锚2023栓接在锚臂2021的前侧,通过设置限位组件202,锚臂2021和锚爪2022可以在泥沙海床进行锚泊,锚爪2022能够铲入泥沙中将锚臂2021固定,十字副锚2023可以稳定的卡在礁石之间,能够同时对泥沙海
床和礁石海床进行锚。
59.使用过程简述:在运送机构1将锚泊机构2放在泥沙海床上,让锚臂2021上的锚爪2022会与泥沙海床接触,并将锚爪2022铲入泥沙海床中即可,在运送机构1将锚泊机构2放在礁石海床上时,让十字副锚2023卡在礁石海床的礁石之间,并让十字副锚2023与礁石卡牢即可,锚杆2012上的锚冠2011则可以提前与外用锚链连接,从而让锚泊机构2通过锚链将人工浮鱼礁限位,将多个该锚泊机构2分别与多个外用锚链连接,再将锚泊机构2分布在远离人工浮鱼礁四个方向并固定即可。
60.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。