技术特征:
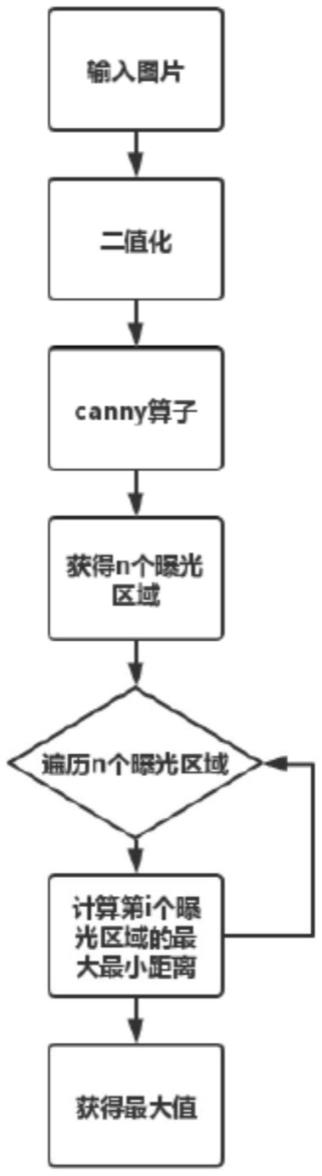
1.一种面向分层与连续相结合的打印的最大最小距离快速计算方法,其特征在于,包括以下步骤:步骤100、首先,在同一打印条件下,打印不同半径的圆柱体模型;找到没有成型异常现象的圆柱体模型最大半径,即为此打印条件下的树脂最大可填充距离,记为mfd;步骤200、遍历一个模型所有的切片图像;首先将切片图像二值化,随后对图片进行边缘提取,使用边界追踪算法获得图片中的所有外边界;根据外边界获得图片中所有相互独立的小曝光区域,其中第i个曝光区域的边界点集合记为vi;步骤300、遍历所有的曝光区域,获得每个曝光区域的最小外接矩形;利用曝光区域的外边界点,使用掩膜将当前曝光区域提取出来;判断当前曝光区域是否为实心区域,是则跳转到步骤400,否则跳转到步骤500;步骤400、对提取后的曝光区域进行细化,得到本区域的骨架点;计算骨架点与所有边界点的距离,获得最小值;找到所有骨架点对应最小值的最大值,即为此区域的最大最小距离;计算得到当前曝光区域的最大最小距离后跳转到步骤600;步骤500、提取后的曝光区域记为c;填充曝光区域,得到d;对d进行细化,得到骨架点;计算骨架点与所有外边界点的距离,获得最小值;其中,计算骨架点到外边界点的距离为两点相连直线在c所经过的白色区域的距离;找到所有骨架点对应最小值的最大值,即为此区域的最大最小距离;计算得到当前曝光区域的最大最小距离后跳转到步骤600步骤600、找到所有曝光区域的最大最小距离的最大值,则为当前切片图像的最大最小距离;将其与mfd进行比较得到切片图像对应层的打印决策。2.根据权利要求1所述方法,其特征在于,步骤100包括:在相同打印条件下打印不同半径的圆柱体模型,圆柱体模型的半径以0.5mm为间隔增加,直至打印模型出现树脂填充不足导致的模型中凹陷甚至出现白色区域的成型异常现象;将未出现成型异常现象的打印模型最大半径作为当前打印条件下树脂的最大可填充距离,即mfd。3.根据权利要求2所述方法,其特征在于:步骤200包括:首先,对输入图像,使用125作为阈值将图像二值化,使其像素值取值为0和255,记为a;其次,对图像进行高斯滤波,高斯核大小设为(3,3);使用canny算子对图像进行边缘化处理,阈值上限为250,阈值下限为100,记为b;然后,对b自上而下、自左而右地扫描图像中的像素点;以最新遇到的非零像素点为边界起点,按照八邻域追踪下一边界点;同样,以下一边界点为起点继续追踪,直至最后一个边界点;每遍历完一个完整边界,便继续以原始起点继续扫描图像;其中,已遍历边界及其内部不再扫描;以此得到图像中的所有外边界点;每一个外边界即对应一个独立的曝光区域;其中第i个曝光区域的边界点集合记为vi。4.根据权利要求1所述方法,其特征在于:步骤300包括:遍历当前曝光区域的所有边界点,记录下横坐标、纵坐标的最大值和最小值;以此可以确定曝光区域的最小外接矩形;其中,第i个曝光区域对应的最小外接矩形记为ti;使用步骤200中获取的vi来创建一个mask掩膜,将掩膜与a相乘,得到一个只留有第i个曝光区域的结果图像,并使用最小外接矩形ti裁剪出第i个曝光区域;根据曝光区域内部是否全部为白色曝光点分为实心区域和嵌套区域。
5.根据权利要求1所述方法,其特征在于:步骤400包括:记最小内接矩形ti中横坐标最小值为minx,纵坐标最小值为miny;将vi中所有点的横纵坐标分别减去minx、miny;重复以下迭代步骤直至结果图像中不再有像素点被删除:一次迭代分为两次子迭代;设p1为当前像素点,p2为p1上方的邻域像素,p3为p1右上方的邻域像素点,p4为p1右侧的邻域像素点,p5为p1右下方的邻域像素点,p6为p1下方的邻域像素点,p7为p1左下方的邻域像素点,p8为p1左侧的邻域像素点,p9为p1左上方的邻域像素点;第一次子迭代,删除满足以下所有条件:(1)2≤b(p1)≤6(2)a(p1)=1(3)p2*p4*p6=0(4)p4*p6*p8=0的像素点;其中,b(p1)代表当前像素点八邻域内非零像素点的个数,a(p1)代表当前像素点顺时针方向八邻域像素点0-1变化次数,p2*p4*p6=0代表像素点p2、p4、p6至少一点的像素值为0,p4*p6*p8=0代表像素点p4、p6、p8至少一点的像素值为0;第二次迭代删除满足以下所有条件:(1)2≤b(p1)≤6(2)a(p1)=1(3)p2*p4*p8=0(4)p2*p6*p8=0的像素点;其中,b(p1)代表当前像素点八邻域内非零像素点的个数,a(p1)代表当前像素点顺时针方向八邻域像素点0-1变化次数,p2*p4*p8=0代表p2、p4、p8至少一点的像素值为0,p2*p6*p8=0代表p2、p6、p8至少一点像素值为0;遍历细化结果图像中所有的骨架点,计算骨架点到vi中所有点的距离;记录每个骨架点到外边界点的距离最小值;根据上述结果,找到所有骨架点对应距离最小值的最大值即为此曝光区域的最大最小距离。6.根据权利要求1所述方法,其特征在于:步骤500包括:因为vi中存储的是裁剪前的曝光区域边界点坐标,所以无法直接使用;记最小内接矩形ti中横坐标最小值为minx,纵坐标最小值为miny;将vi中所有点的横纵坐标分别减去minx、miny;提取后的曝光区域记为c;填充曝光区域,得到图像d;重复以下迭代步骤直至d中不再有像素点被删除:一次迭代分为两次子迭代;设p1为当前像素点,p2为p1上方的邻域像素,p3为p1右上方的邻域像素点,p4为p1右侧的邻域像素点,p5为p1右下方的邻域像素点,p6为p1下方的邻域像素点,p7为p1左下方的邻域像素点,p8为p1左侧的邻域像素点,p9为p1左上方的邻域像素点;第一次子迭代,删除满足以下所有条件:(1)2≤b(p1)≤6(2)a(p1)=1(3)p2*p4*p6=0(4)p4*p6*p8=0的像素点;其中,b(p1)代表当前像素点八邻域内非零像素点的个数,a(p1)代表当前像素点顺时针方向八邻域像素点0-1变化次数,p2*p4*p6=0代表像素点p2、p4、p6至少一点的像素值为0,p4*p6*p8=0代表像素点p4、p6、p8至少一点的像素值为0;第二次迭代删除满足以下所有条件:(1)2≤b(p1)≤6(2)a(p1)=1(3)p2*p4*p8=0(4)p2*p6*p8=0的像素点;其中,b(p1)代表当前像素点八邻域内非零像素点的个数,a(p1)代表当前像素点顺时针方向八邻域像素点0-1变化次数,p2*p4*p8=0代表p2、p4、p8至少一点的像素值为0,p2*p6*p8=0代表p2、p6、p8至少一点像素值为0;遍历细化结果图像中所有的骨架点,计算骨架点到vi中所有点的距离;其中,计算骨架点到外边界点的距离为两点相连直线经过的白色区域的距离;具体计算方法为:计算骨架点与外边界点相连的直线方程;遍历直线经过的所有像素点,记录下所有像素值与前一像
素点不同的像素点,记为集合p;利用集合p中的交点将骨架点与外边界点相连的直线分成多个线段,求得经过白色区域的线段距离之和;找到所有骨架点对应最小值的最大值,即为此曝光区域的最大最小距离。7.根据权利要求1所述方法,其特征在于:步骤600包括:记录下所有曝光区域的最大最小距离,取最大值作为结果;结果与mfd的大小,如果结果大于mfd,则说明树脂无法及时填充,此切片图像对应层为分层打印;如果结果小于mfd,则说明树脂可以及时填充,对应层为连续打印。
技术总结
一种面向分层与连续相结合的打印的最大最小距离快速计算方法涉及图像处理技术领域。该方法包括如下步骤:图像预处理、图像曝光区域提取、计算量优化、最大最小距离计算、输出打印控制方案。现有算法存在两个主要缺陷:(1)无法计算复杂切片图像的最大最小距离(2)计算较大,计算速度慢。本发明可以获得精准的分层与连续相结合的打印控制方案,提高打印效率,同时具有可移植性。因此本发明具有一定的应用价值和意义。值和意义。值和意义。
技术研发人员:毋立芳 门泽宁 赵立东 姜梦成 项明力 石戈 李尊
受保护的技术使用者:北京工业大学
技术研发日:2022.10.07
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。