1.本发明属于吊挂设备技术领域,涉及一种多电机输送装置及其同步控制方法和吊挂设备。
背景技术:
2.在吊挂齿条的运输线中,需要使用到多台电机带动运输。现有技术中,当一条线体运行,各电机之间总会出现不同步的现象。电机上的齿轮带动齿条沿线体运行,当多电机不同步运行时,整条线体的齿条中的各部分会相互产生拉扯的力,此时对电机、齿条等都会造成较大的磨损,容易出现故障且影响运行效率。
3.可见,现有技术存在一定的缺陷。
技术实现要素:
4.本发明针对现有技术存在的上述问题,提供一种多电机输送装置,本发明所要解决的技术问题是:如何使多个电机同步运行。
5.本发明的目的可通过下列技术方案来实现:
6.一种多电机输送装置,其特征在于,所述多电机输送装置包括主控制器和至少两个电机,各电机电连接有用于控制该电机转速的从控制器,各从控制器与所述主控制器电连接,所述电机具有输出轴,所述输出轴的一端固定有齿轮,输出轴的另一端固定有光栅片,所述电机的外壳上还设置有霍尔传感器。
7.其工作原理是:光栅片随着电机的输出轴转动而转动,设定电机转动一圈的时间为x,那么在x/2或x/4时间检测电机的转动角度是否为1/2周(180
°
)或1/4周(90
°
)。检测时,霍尔定0位,光栅片计数,通过光栅片和霍尔传感器来确定电机的转动角度,若电机转动角度过大或过小,则通过对应的从控制器自动减慢或增加电机转速,不断调整电机的转动速度,使多电机始终保持同步运行。
8.本发明的另一个目的在于,提供一种吊挂设备,其特征在于,所述吊挂设备包括上述的多电机输送装置。
9.本发明的再一个目的在于,提供一种多电机输送装置的同步控制方法,其特征在于,所述控制方法包括如下步骤:
10.s1:主控制器发出脉冲信号,使各电机同步时序,从控制器接收信号后控制相应的电机按预设的角度进行转动;
11.s2:电机运行过程中各从控制器校验脉冲时序,若出现偏差,与该电机连接的从控制器自动进行矫正;
12.s3:若主控制器更改了电机的运行速度,从控制器先计算该脉冲周期匹配的角度,然后在相应的脉冲周期内,控制对应的电机以相应的角度进行转动。
13.多电机输送装置中的各电机安装在线体中,各电机通过光栅片和霍尔传感器来确定电机的转动角度,若电机转动角度过大或过小,则通过对应的从控制器自动减慢或增加
电机转速,不断调整电机的转动速度,使多电机始终保持同步运行。
14.本控制方法使整个线体中的多个电机能够自动调整转速,实现多电机同步运行,多电机同步带动齿条运行,当所有电机自动调整为相同转速时,能尽量减少电机与齿条间的拉扯磨损,可以更好的保护电机,增加电机与线体的使用寿命,减少故障率。此外,多电机同步运行可以更加流畅的带动齿条,提高运行效率。
15.此控制方法采用多电机同步技术,可以在设计上提高线长(现有技术中,由于多电机不同步,传动效率受到影响,线体长度也受到限制),提升整场布局能力,满足更高的需求。
16.在上述的一种多电机输送装置的同步控制方法中,在步骤s1中,主控制器输出24v高电平至所有从控制器,并启动所有电机从相同的起点开始运行,当主控制器输出低电平时,从控制器控制电机停止,所有的电机停止在相同的位置。
17.本控制方法中,通过主控制器输出24v高电平使电机启动,主控制器输出低电平,使电机停止。
18.在上述的一种多电机输送装置的同步控制方法中,所有的从控制器的反馈信号相串联,所述反馈信号连接的终端电机接低电平,当电机正常启动时,所述反馈信号处于导通状态,当所有的反馈信号都导通时,则有低电平输入至主控制器,若有的电机没有运行,则反馈信号为高电平。
19.本控制方法中,所有的从控制器的反馈信号相串联,能够保证多电机可以同时启动,当任何一个电机出现故障时,使其他电机停止运行,提高安全性。
20.在上述的一种多电机输送装置的同步控制方法中,所述脉冲信号为5ms的方波信号。
21.在上述的一种多电机输送装置的同步控制方法中,所述5ms的脉冲方波通过rs485芯片转换成差分信号传输,从控制器接收端匹配rs485芯片把接收到的差分信号重新转换成脉冲方波,并传输至从控制器的cpu。
22.本控制方法采用5ms的脉冲方波,使用rs485芯片实现脉冲信号和差分信号的转换,即使传输的距离远时,也能够很好的增加传输时的抗干扰性能,通过信号转换的方式增强信号传输性能,保证多带电机之间的信号进行稳定的传输。
23.与现有技术相比,本发明的优点如下:
24.1.本控制方法使整个线体中的多个电机能够自动调整转速,实现多电机同步带动齿条运行,当所有电机自动调整为相同转速时,能尽量减少电机与齿条间的拉扯磨损,可以更好的保护电机,增加电机与线体的使用寿命,减少故障率。
25.2.多电机同步运行可以更加流畅的带动齿条,提高运行效率。
26.3.本控制方法采用多电机同步技术,可以在设计上提高线长,提升整场布局能力,满足更高的需求。
附图说明
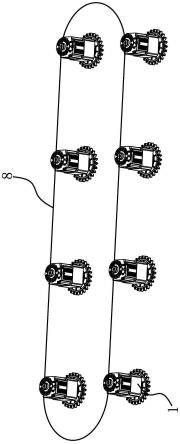
27.图1是本多电机输送装置安装在线体上的示意图;
28.图2是电机的结构示意图;
29.图3是本多电机输送装置的工作原理框图;
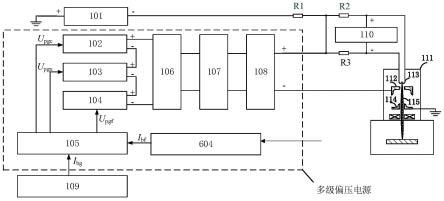
30.图4是多电机输送装置的线路图。
31.图中:1电机,2主控制器,3从控制器,4输出轴,5齿轮,6光栅片,7霍尔传感器,8线体,9同步信号输入端,10电机启停信号输出端,11电机故障信号输入端,12电机信号线。
具体实施方式
32.以下是本发明的具体实施例,并结合附图对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
33.如图1-4所示,本多电机输送装置包括主控制器2和至少两个电机1,各电机1电连接有用于控制该电机1转速的从控制器3,各从控制器3与主控制器2电连接,电机1具有输出轴4,输出轴4的一端固定有齿轮5,输出轴4的另一端固定有光栅片6,电机1的外壳上还设置有霍尔传感器7。图4中,电机信号线12将各电机1相串联。
34.光栅片6随着电机1的输出轴4转动而转动,设定电机1转动一圈的时间为x,那么在x/2或x/4时间检测电机1的转动角度是否为1/2周(180
°
)或1/4周(90
°
)。检测时,霍尔定0位,光栅片6计数,通过光栅片6和霍尔传感器7来确定电机1的转动角度,若电机1转动角度过大或过小,则通过对应的从控制器3自动减慢或增加电机1转速,不断调整电机1的转动速度,使多电机1始终保持同步运行。
35.本发明还提供一种吊挂设备,该吊挂设备包括上述的多电机输送装置。
36.本发明还提供一种多电机输送装置的同步控制方法,该控制方法包括如下步骤:
37.s1:主控制器2发出脉冲信号,使各电机1同步时序,从控制器3接收信号后控制相应的电机1按预设的角度进行转动;
38.s2:电机1运行过程中各从控制器3校验脉冲时序,若出现偏差,与该电机1连接的从控制器3自动进行矫正;
39.s3:若主控制器2更改了电机1的运行速度,从控制器3先计算该脉冲周期匹配的角度,然后在相应的脉冲周期内,控制对应的电机1以相应的角度进行转动。
40.多电机输送装置中的各电机1安装在线体8中,各电机1通过光栅片6和霍尔传感器7来确定电机1的转动角度,若电机1转动角度过大或过小,则通过对应的从控制器3自动减慢或增加电机1转速,不断调整电机1的转动速度,使多电机1始终保持同步运行。
41.本控制方法使整个线体8中的多个电机1能够自动调整转速,实现多电机1同步运行,多电机1同步带动齿条运行,当所有电机1自动调整为相同转速时,能尽量减少电机1与齿条间的拉扯磨损,可以更好的保护电机1,增加电机1与线体8的使用寿命,减少故障率。此外,多电机1同步运行可以更加流畅的带动齿条,提高运行效率。
42.此控制方法采用多电机1同步技术,可以在设计上提高线长(现有技术中,由于多电机不同步,传动效率受到影响,线体长度也受到限制),提升整场布局能力,满足更高的需求。
43.优选的,在步骤s1中,主控制器2输出24v高电平至所有从控制器3,并启动所有电机1从相同的起点开始运行,当主控制器2输出低电平时,从控制器3控制电机1停止,所有的电机1停止在相同的位置。
44.本控制方法中,通过主控制器2输出24v高电平使电机1启动,主控制器2输出低电平,使电机1停止。
45.优选的,所有的从控制器3的反馈信号相串联,反馈信号连接的终端电机1接低电平,当电机1正常启动时,反馈信号处于导通状态,当所有的反馈信号都导通时,则有低电平输入至主控制器2,若有的电机1没有运行,则反馈信号为高电平。
46.本控制方法中,所有的从控制器3的反馈信号相串联,能够保证多电机1可以同时启动,当任何一个电机1出现故障时,使其他电机1停止运行,提高安全性。
47.优选的,脉冲信号为5ms的方波信号。
48.优选的,5ms的脉冲方波通过rs485芯片转换成差分信号传输,从控制器3接收端匹配rs485芯片把接收到的差分信号重新转换成脉冲方波,并传输至从控制器3的cpu。
49.本控制方法采用5ms的脉冲方波,使用rs485芯片实现脉冲信号和差分信号的转换,即使传输的距离远时,也能够很好的增加传输时的抗干扰性能,通过信号转换的方式增强信号传输性能,保证多带电机1之间的信号进行稳定的传输。
50.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。