1.本发明属于图像识别技术领域,具体涉及消防机器人火源搜索方法及系统。
背景技术:
2.随着社会经济的快速发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,火灾事故发生的概率也相应提高。消防员在救火时需面对浓烟,高温,黑暗,有毒等灾害环境,直接入场会有较大的安全隐患。智慧消防机器人能够在极大程度上提高灭火的效率,抢夺灭火时间,抑制火势蔓延,减少财产损失和人员伤亡。
3.一部分现有技术对主要目标火源识别的速度较低,而丧失最佳救火时间;或者另一部分现有技术对对小目标火源识别率较低,容易导致火势扩散,且识别距离较近,不能满足智慧消防机器人远距离灭火需求;导致现有的消防机器人火源搜索方法不能有效平衡火源搜索的实时性和准确率。
技术实现要素:
4.本发明的目的在于提供一种消防机器人火源搜索方法及系统,有效平衡了火源搜索的实时性和准确率,辅助消防机器人执行及时有效的灭火行动。
5.为达到上述目的,本发明所采用的技术方案是:
6.本发明第一方面提供了一种消防机器人火源搜索方法,包括:
7.控制消防机器人的高清相机扫描火灾现场,获得扫描区域的实时高清图像;
8.将实时高清图像输入至训练好的初级深度学习模型中,对扫描区域内是否发生火灾进行初级检测;若检测到扫描区域内发生火灾,由实时高清图像中提取火灾区域坐标;
9.若未检测到扫描区域内未发生火灾,对实时高清图像进行冗余分割获取单元检测图像;
10.将单元检测图像输入至训练好的高级深度学习模型中,对扫描区域内是否发生火灾进行高级检测;若未检测到扫描区域内发生火灾,更换火灾现场中的扫描区域进行重新火源搜索;若检测到扫描区域内发生火灾,由单元检测图像中提取火灾区域坐标;
11.根据初级检测过程或高级检测过程中提取的火灾区域坐标控制消防机器人执行灭火行动。
12.优选的,对实时高清图像进行冗余分割获取单元检测图像的方法包括:
13.对实时高清图像进行第一次分割获得基础单元图像;
14.在实时高清图像提取2
×
2的基础单元图像矩阵,由2
×
2的基础单元图像矩阵中心提取重叠单元图像;将基础单元图像和重叠单元图像作为单元检测图像。
15.优选的,所述重叠单元图像和基础单元图像尺寸相同。
16.优选的,对实时高清图像进行第一次分割获得基础单元图像的方法包括:
17.将实时高清图像分割为2
×
2基础单元图像矩阵或者3
×
3基础单元图像矩阵。
18.优选的,相邻的两单元检测图像之间设有重叠区域。
19.优选的,所述初级深度学习模型和高级深度学习模型的训练方法包括:
20.采集火灾现场的历史高清图像,构建初级训练集;通过初级训练集对深度学习模型进行训练,获得检测准确率大于设定阈值a的初级深度学习模型;
21.将历史高清图像进行分割获得历史单元检测图像,构建高级训练集;通过高级训练集对深度学习模型进行训练,获得检测准确率大于设定阈值b的高级深度学习模型。
22.优选的,所述深度学习模型设置为高实时性模型,包括但不限于yolov3模型、yolov4模型或efficientdet模型。
23.本发明第二方面提供了一种消防机器人火源搜索系统,包括:
24.采集模块,用于控制消防机器人的高清相机扫描火灾现场,获得扫描区域的实时高清图像;
25.初级检测模块,用于将实时高清图像输入至训练好的初级深度学习模型中,对扫描区域内是否发生火灾进行初级检测;若检测到扫描区域内发生火灾,由实时高清图像中提取火灾区域坐标;
26.图像分割模块,用于若未检测到扫描区域内未发生火灾,对实时高清图像进行冗余分割获取单元检测图像;
27.高级检测模块,用于将单元检测图像输入至训练好的高级深度学习模型中,对扫描区域内是否发生火灾进行高级检测;若未检测到扫描区域内发生火灾,更换火灾现场中的扫描区域进行重新火源搜索;若检测到扫描区域内发生火灾,由单元检测图像中提取火灾区域坐标;
28.控制模块,根据初级检测过程或高级检测过程中提取的火灾区域坐标控制消防机器人执行灭火行动。
29.优选的,所述消防机器人上设有检测温度的红外线传感器;所述控制模块控制消防机器人的高清相机朝向温度升高方向移动扫描火灾现场。
30.优选的,所述所述高清相机分辨率为2k或4k。
31.本发明第三方面提供了电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现所述火源搜索方法的步骤。
32.与现有技术相比,本发明的有益效果:
33.本发明将实时高清图像输入至训练好的初级深度学习模型中,对扫描区域内是否发生火灾进行初级检测;若未检测到扫描区域内未发生火灾,对实时高清图像进行冗余分割获取单元检测图像;将单元检测图像输入至训练好的高级深度学习模型中,对扫描区域内是否发生火灾进行高级检测;通过先初级检测保证火源搜索的实时性,通过高级检测保证火源搜索的准确性,同时通过高级检索可以提升消防机器人检测灭火的距离,避免检测灭火的距离过近影响消防机器人工作。
34.本发明中对实时高清图像进行第一次分割获得基础单元图像;在实时高清图像提取2
×
2的基础单元图像矩阵,由2
×
2的基础单元图像矩阵中心提取重叠单元图像;将基础单元图像和重叠单元图像作为单元检测图像;通过提取重叠单元图像可以避免火源图像分割后影响检测结果,提高火源搜索的准确性。
附图说明
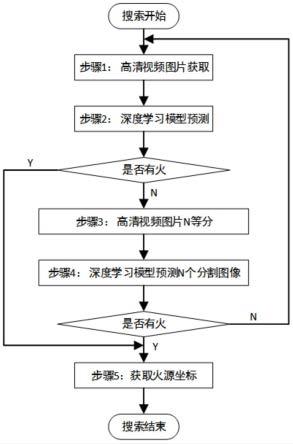
35.图1是本发明实施例一提供的一种消防机器人火源搜索方法的流程图;
36.图2是本发明实施例一提供的实时高清图像的分割图。
具体实施方式
37.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
38.实施例一
39.如图1所示,本发明第一方面提供了一种基于巡检视频的隐患检测方法,包括:
40.对初级深度学习模型和高级深度学习模型进行训练,方法包括:
41.采集火灾现场的历史高清图像,构建初级训练集;通过初级训练集对深度学习模型进行训练,获得检测准确率大于设定阈值a的初级深度学习模型;
42.将历史高清图像进行分割获得历史单元检测图像,构建高级训练集;通过高级训练集对深度学习模型进行训练,获得检测准确率大于设定阈值b的高级深度学习模型;所述深度学习模型设置为高实时性模型,包括但不限于yolov3模型、yolov4模型或efficientdet模型。
43.控制消防机器人的高清相机扫描火灾现场,获得扫描区域的实时高清图像;
44.将实时高清图像输入至训练好的初级深度学习模型中,对扫描区域内是否发生火灾进行初级检测;若检测到扫描区域内发生火灾,由实时高清图像中提取火灾区域坐标;根据初级检测过程提取的火灾区域坐标控制消防机器人执行灭火行动,通过先初级检测保证火源搜索的实时性,避免因搜索时间太久丧失最佳救火时间。
45.若未检测到扫描区域内未发生火灾,如图2所示,对实时高清图像进行分割获取单元检测图像的方法包括:
46.对实时高清图像进行第一次分割获得基础单元图像;将实时高清图像分割为2
×
2基础单元图像矩阵,将实时高清图像分为4等分;或者,将实时高清图像分割为3
×
3基础单元图像矩阵,将实时高清图像分为9等分。
47.在实时高清图像提取2
×
2的基础单元图像矩阵,由2
×
2的基础单元图像矩阵中心提取重叠单元图像;本实施例提供的图像分割方法能够避免较大火源图像被分割;所述重叠单元图像和基础单元图像尺寸相同;将基础单元图像和重叠单元图像作为单元检测图像,通过提取重叠单元图像可以避免火源图像分割后影响检测结果,提高火源搜索的准确性;
48.将单元检测图像输入至训练好的高级深度学习模型中,对扫描区域内是否发生火灾进行高级检测;若未检测到扫描区域内发生火灾,更换火灾现场中的扫描区域进行重新火源搜索;若检测到扫描区域内发生火灾,由单元检测图像中提取火灾区域坐标;
49.根据高级检测过程中提取的火灾区域坐标控制消防机器人执行灭火行动;通过高级检测保证火源搜索的准确性,同时通过高级检索可以提升消防机器人检测灭火的距离,避免检测灭火的距离过近影响消防机器人工作。
50.实施例二
51.一种消防机器人火源搜索系统,本实施例提供的系统可以应用于实施例一所述的
方法,火源搜索系统包括:
52.采集模块,用于控制消防机器人的高清相机扫描火灾现场,获得扫描区域的实时高清图像;
53.初级检测模块,用于将实时高清图像输入至训练好的初级深度学习模型中,对扫描区域内是否发生火灾进行初级检测;若检测到扫描区域内发生火灾,由实时高清图像中提取火灾区域坐标;
54.图像分割模块,用于若未检测到扫描区域内未发生火灾,对实时高清图像进行冗余分割获取单元检测图像;
55.高级检测模块,用于将单元检测图像输入至训练好的高级深度学习模型中,对扫描区域内是否发生火灾进行高级检测;若未检测到扫描区域内发生火灾,更换火灾现场中的扫描区域进行重新火源搜索;若检测到扫描区域内发生火灾,由单元检测图像中提取火灾区域坐标;
56.控制模块,根据初级检测过程或高级检测过程中提取的火灾区域坐标控制消防机器人执行灭火行动。
57.优选的,所述消防机器人上设有检测温度的红外线传感器;所述控制模块控制消防机器人的高清相机朝向温度升高方向移动扫描火灾现场。
58.实施例三
59.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现实施例一所述火源搜索方法的步骤。
60.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
61.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
62.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
63.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
64.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。