1.本发明涉及一种泵控工作平台调平系统及云梯消防车,属于技术领域。
背景技术:
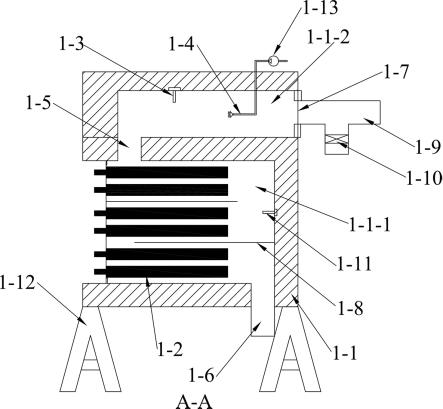
2.采用折叠臂架结构的云梯消防车,臂架再做俯仰运动时,安装与臂架末端的工作平台需要始终保持与地面平行方向,因此需要设置实时调平控制,如图1所示。
3.平台调平控制一般采用电液调平控制技术,即通过安装在工作平台内的倾角传感器实时检测平台倾角,当倾角超过某一角度(理论是0
°
,但实际根据调平精度一般在0.2-0.5度)时,调平电气控制系统会发出控制信号,控制液压系统驱动调平油缸运动,使工作平台向倾角为零的方向运动,从而始终保持与水平面平行。
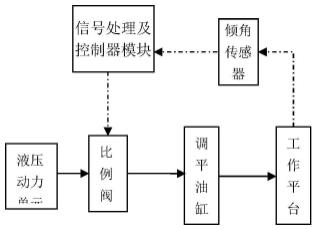
4.云梯消防车平台调平系统现有方案是阀控方式,即通过控制比例阀的开启大小和开启速度来驱动调平油缸运动,控制原理如图2。
5.现有方案的缺点:
6.(1)比例阀的死区和滞环特性影响工作平台调平速度;
7.(2)工作平台负载变化会影响比例阀流量变化,造成平台调平不稳定;
8.(3)液压系统温度变化会影响比例阀电磁铁电阻变化,从而影响调平精度;
9.(4)液压油经过比例阀会造成压力损失,系统效率低。
技术实现要素:
10.本发明的目的在于克服现有技术中的不足,提供一种泵控工作平台调平系统及云梯消防车,直接采用泵控系统,无需比例阀。直接通过液压伺服动力单元控制调平油缸的速度和精度。解决了现有系统的缺点,简化了调平系统元件组成,提高了云梯消防车工作平台调平性能。。
11.为达到上述目的,本发明是采用下述技术方案实现的:
12.第一方面,本发明提供了一种泵控工作平台调平系统,包括:
13.倾角传感器:安装在工作平台上,用于检测工作平台与水平面的倾角,生成倾角信号;
14.信号处理及控制器模块:与所述倾角传感器连接,用于将倾角信号进行信号处理,生成伺服电机转速的控制信号;
15.液压伺服动力单元:与所述信号处理及控制器模块连接,用于根据所述控制信号输出液压动力至所述调平油缸;
16.调平油缸:用于根据所述液压动力驱动工作平台旋转调平;
17.当倾角传感器检测到平台倾角大于0时,倾角传感器将该倾角信号传递到信号处理及控制器模块,对所述倾角信号进行信号处理后,输出控制信号驱动液压伺服动力单元运行,输出的液压动力直接驱动调平油缸运动。
18.进一步的,所述信号处理及控制器模块进行信号处理的方法包括:
19.传感器信号滤波:通过滤波器将传感器信号进行过滤,去掉噪音和振动。
20.零位角度信号标定:标定工作平台为水平时对应的传感器角度信号。
21.角度信号转换控制输出电压:将角度信号转换为控制伺服电机的电压信号。
22.进一步的,电压输出斜坡及大小范围调整:调整电压信号启停缓冲斜坡,防止电机启停冲击,得到作为控制信号的电压信号。
23.进一步的,所述信号处理及控制器模块通过液压伺服动力单元获取伺服电机转速反馈信号,通过倾角信号换算得到实际控制需求转速;
24.所述信号处理及控制器模块输出的控制信号大小由倾角传感器的倾角信号大小决定,同时通过液压伺服动力单元的伺服电机转速反馈信号进行补偿,以确保液压伺服动力单元输出流量稳定。
25.进一步的,通过液压伺服动力单元的伺服电机转速反馈信号进行补偿的方法包括:
26.采用控制输出多线段动态补偿方式,保障电机反馈转速和实际控制需求速度误差在允许范围内,公式如下:
27.v=(r1-r2)
×
px
28.其中v为控制输出电压,r1为实际控制需求转速,r2为电机反馈转速,px为多线段动态角度调整系数,此系数通过理论速度与实际测试速度补偿的矩阵选择值。
29.进一步的,所述倾角传感器为电子水平仪。
30.第二方面,本发明提供一种云梯消防车,包括如第一方面所述的泵控工作平台调平系统。
31.与现有技术相比,本发明所达到的有益效果:
32.(1)现有技术采用比例阀控制流量,本发明直接采用泵控制流量,取消了比例阀,因此就不存在“比例阀的死区和滞环特性影响工作平台调平速度”的缺点;
33.(2)工作平台负载变化,会导致液压系统压力变化,从而对现有系统中比例阀的流量输出造成影响,本发明取消了比例阀,流量只由泵的转速控制,与负载无关。因此消除了负载变化对流量的影响。
34.(3)现有系统中液压油温度变化会影响比例阀电磁铁电阻变化,电阻的改变引起电磁阀驱动电压变化,进而导致阀口开度变化,从而影响调平精度;本发明取消了比例阀,只要控制伺服电机转速稳定即可。消除了液压油温度变化对调平的影响。
35.(4)现有技术中,油泵输出定量的液压油,而通过比例阀来控制调平所需要的液压油,那么油泵输出多余的液压油全部通过高压溢流损失掉。而本发明取消了比例阀,通过控制泵的转速使输出的液压油刚好满足调平所需要的液压油,无多余的液压油损失,因为压力损失低,效率更高。
36.(5)本发明通过液压伺服动力单元的伺服电机转速反馈信号进行补偿,确保液压伺服动力单元输出流量稳定。
附图说明
37.图1是云梯消防车工作平台示意图;
38.图2是电液调平阀控系统原理图;
39.图3是本发明方式原理图。
具体实施方式
40.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
41.相关术语:
42.比例阀死区:由于阀芯中位的遮盖和阀芯运动摩擦力的影响,导致驱动阀芯开启的电流信号需要达到某一个值之后阀芯才会突然打开,驱动信号从零到该值的区域称为比例阀死区。
43.比例阀滞环:驱动阀芯运动到同一个位置,在开启过程和关闭过程的电流信号大小不一致,两者的电流差值称为滞环。
44.实施例一:
45.本实施例提供一种泵控工作平台调平系统,主要包括液压伺服动力单元、信号处理及控制模块和调平油缸三部分。调平原理如3所示。
46.倾角传感器:安装在工作平台上,用于检测工作平台与水平面的倾角,生成倾角信号;
47.信号处理及控制器模块:与倾角传感器连接,用于将倾角信号进行信号处理,生成伺服电机转速的控制信号;
48.液压伺服动力单元:与信号处理及控制器模块连接,用于根据控制信号输出液压动力至调平油缸;
49.调平油缸:用于根据液压动力驱动工作平台旋转调平;
50.当倾角传感器检测到平台倾角大于0时,倾角传感器将该倾角信号传递到信号处理及控制器模块,对倾角信号进行信号处理后,输出控制信号驱动液压伺服动力单元运行,输出的液压动力直接驱动调平油缸运动。
51.当工作平台倾角传感器检测到平台倾角大于0时,倾角传感器将该信号传递到信号处理及控制器模块,经过信号处理后,信号处理及控制器模块输出控制信号驱动液压伺服动力单元运行,输出的液压动力直接驱动调平油缸运动。
52.控制器模块输出的驱动信号大小由倾角传感器的倾角信号大小决定,同时通过液压伺服动力单元的伺服电机转速反馈信号进行补偿,确保液压伺服动力单元输出流量稳定。
53.具体的,通过液压伺服动力单元的伺服电机转速反馈信号进行补偿的方法包括:
54.采用控制输出多线段动态补偿方式,保障电机反馈转速和实际控制需求速度误差在允许范围内,公式如下:
55.v=(r1-r2)
×
px
56.其中v为控制输出电压,r1为实际控制需求转速,r2为电机反馈转速,px为多线段动态角度调整系数,此系数通过理论速度与实际测试速度补偿的矩阵选择值。
57.需求速度是由调平角度确定的,比如调平要稳定到0.5度,那么就要控制输出流量满足油缸的转动速度,油缸转动速度慢了就会导致调平角度增大,平台可能倾斜了。油缸转动速度快了,可能就导致平台调过了。具体的实际控制需求转速与倾角信号的换算关系由
经验或者数据拟合得到。
58.具体倾角信号与需要速度的换算关系可以通过试验或者经验获得。
59.优选地,倾角传感器为电子水平仪。
60.现有技术采用比例阀控制流量,本发明直接采用泵控制流量,取消了比例阀,因此就不存在“比例阀的死区和滞环特性影响工作平台调平速度”的缺点;
61.工作平台负载变化,会导致液压系统压力变化,从而对现有系统中比例阀的流量输出造成影响,本发明取消了比例阀,流量只由泵的转速控制,与负载无关。因此消除了负载变化对流量的影响。
62.现有系统中液压油温度变化会影响比例阀电磁铁电阻变化,电阻的改变引起电磁阀驱动电压变化,进而导致阀口开度变化,从而影响调平精度;本发明取消了比例阀,只要控制伺服电机转速稳定即可。消除了液压油温度变化对调平的影响。
63.现有技术中,油泵输出定量的液压油,而通过比例阀来控制调平所需要的液压油,那么油泵输出多余的液压油全部通过高压溢流损失掉。而本发明取消了比例阀,通过控制泵的转速使输出的液压油刚好满足调平所需要的液压油,无多余的液压油损失,因为压力损失低,效率更高。
64.本发明通过液压伺服动力单元的伺服电机转速反馈信号进行补偿,确保液压伺服动力单元输出流量稳定。
65.实施例二:
66.本实施例提供一种云梯消防车,包括如实施例一所述的泵控工作平台调平系统。
67.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
68.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
69.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
70.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
71.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人
员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。