1.本发明属于视觉领域目标定位系统设计领域,特别涉及一种基于矩阵特征值的特征点错误匹配率降低方法。
背景技术:
2.目前,基于视觉的相对测量包括对目标的姿态和位置进行确定,考虑视觉位姿测量技术在很多机器人、航天器导航等领域的应用,很多位姿解算方法被提出。通常,目标上面会存在很多特征点,位姿测量方案可以转变为透视特征点位姿求解问题,其中涉及三维点坐标和二维图像投影间的对应关系,但是由于光照、阴影等特性,在图像处理过程中会出现特征点错误匹配问题,但是存在错误匹配点会给位姿求解算法带来估计误差,通常错误匹配率越高,误差越大,因此,如何利用降低特征点错误匹配率,从而服务于目标位姿精确测量是当前视觉相对测量工程领域中亟待解决的问题。
技术实现要素:
3.针对在实际视觉目标定位任务中,由于图像处理算法引入的错误匹配问题会导致目标定位误差增大,本发明提供了一种基于特征值的特征点错误匹配率降低方法,通过对错误点批量处理,实现对特征点错误匹配率的降低。
4.为实现上述目的,本发明提供了一种基于矩阵特征值的特征点错误匹配率降低方法,其特征在于,包括如下步骤:
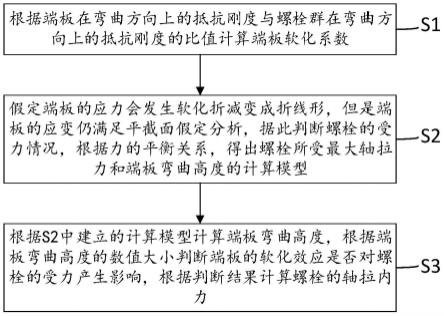
5.步骤s1:定义三维世界坐标到二维图像坐标投影过程,并初始化所有匹配点为正确点;
6.步骤s2:利用正确点将非线性系统转换为线性系统并定义误差函数,对二维图像坐标进行预测;
7.步骤s3:获取预测值和测量值图像坐标之间的误差,通过分析误差分布情况,确定错误点和正确点;
8.步骤s4:根据挑选出来的正确点重新按照步骤s2、步骤s3循环若干次数,从而不断降低特征点错误匹配率。
9.进一步地,所述步骤s1中对于三维世界坐标点pi=[p
ix
,p
iy
,p
iz
,1]
t
到二维图像坐标pi=[ui,vi,1]
t
投影的透视过程为:
[0010]
sipi=k[r|t]piꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0011]
其中,si表示第i个点的深度,k表示已知摄像机内部标定参数,r和t分别为旋转矩阵和位置向量:
[0012]
[0013]
定义矩阵如下:
[0014][0015]
进一步地,所述步骤s2具体包括:
[0016]
将公式(3)h矩阵写成向量h形式:
[0017]
h=[r
11
,r
21
,r
31
,t1,r
12
,r
22
,r
32
,t2,r
13
,r
23
,r
33
,t3]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0018]
已知有n对三维世界坐标点{pi=[p
ix
,p
iy
,p
iz
,1]
t
}
i=1,...,n
到二维图像坐标{pi=[ui,vi,1]
t
}
i=1,...,n
,然后利用直接线性变换推导公式(1)如下:
[0019]
mh=09×1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0020][0021]
其中0i×j代表i乘j的零矩阵,分别根据图像坐标u和v将矩阵m拆写成两个矩阵mu,mv:
[0022][0023]
首先利用mu矩阵定义一个基于特征值的误差函数:
[0024][0025]
其中为待求图像坐标预测值,符号代表使f(x)达到最小值的变量x的取值,det(x)代表矩阵x的行列式,设定:
[0026][0027]
其中代表矩阵zu第i到j行、第p到q列构成的矩阵,则以及分析得出
[0028]
对上述公式进行推导得到如下:
[0029][0030]
通过分析得到上述公式是以一个关于一元二次方程的平方,求取这个函数的最小值,计算二元一次方程判别式如下:
[0031][0032]
如果δu≤0,则公式(7)中误差函数的解为如果δu>0,则公式(7)中误差函数的解为
[0033]
其次利用mv矩阵定义另一个基于特征值的误差函数:
[0034][0035]
其中为待求图像坐标预测值,定义并定义:
[0036][0037]
其中代表矩阵zv第i到j行、第p到q列构成的矩阵,则以及分析得出对公式(7)进行推导得到如下:
[0038][0039]
分析可知上述公式是以一个关于一元二次方程的平方,求取这个函数的最小值,计算二元一次方程判别式如下:
[0040][0041]
如果δv≤0,则公式(11)中误差函数的解为如果δv>0,则公式
(11)中误差函数的解为
[0042]
进一步地,所述步骤s3具体包括:
[0043]
结合和得到偏移序列和并定义如下和分别对应的距离误差
[0044][0045]
其中σu是由误差序列计算得到的标准差,σv是由误差序列计算得到的标准差。利用设定阈值δ,如果第i个点同时满足条件和则认为是正确点,反之则认为是错误点,最终从序列{pi}
i=1,...,n
和{pi}
i=1,...,n
中挑选出正确点。
[0046]
进一步地,所述步骤s4中通过步骤s2利用正确点重新构造矩阵mu和mv进行上述s2和s3操作,设定循环次数并在每次循环中通过阈值δ乘以消减因子ρ更新阈值δ,最终实现基于矩阵特征值对错误匹配率的不断降低。
[0047]
本发明的有益效果:
[0048]
1)本发明考虑了错误点和正确点的误差分布情况,设计了一种基于矩阵特征值的特征点错误匹配率降低方法;
[0049]
2)本方法避免了传统特征点错误匹配中位姿求解方法,简化了特征点错误匹配流程。
附图说明
[0050]
图1为本发明实施例的基于矩阵特征值的特征点错误匹配率降低方法流程图;
[0051]
图2为本发明实施例的相机投射投影模型示意图;
[0052]
图3为本发明实施例的特征点错误匹配率降低仿真。
具体实施方式
[0053]
下面结合附图和实施例进一步描述本发明,应该理解,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0054]
如图1所示,本实施例的一种基于矩阵特征值的特征点错误匹配率降低方法,包括如下步骤:
[0055]
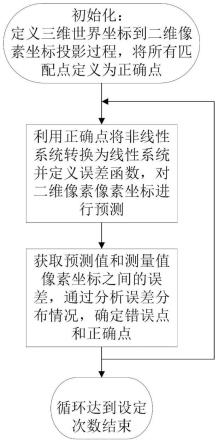
s1:进行初始化,定义三维世界坐标到二维像素坐标投影过程,将所有匹配点定义为正确点,具体包括:
[0056]
设定相机内参矩阵k为单位矩阵i3×3,对于三维世界特征点pi=[p
ix
,p
iy
,p
iz
,1]
t
满足条件p
ix
∈[-2,2],p
iy
∈[-2,2],p
iz
∈[-2,2],旋转矩阵r任意给定,位置向量设定[0.1,0.1,6]
t
,利用相机投影原理可以求得二维图像坐标pi=[ui,vi,1]
t
,设定150正确匹配点{pi}
i=1,...,150
和{pi=[ui,vi,1]
t
}
i=1,...,150
,设定错误匹配点数量为150,则错误匹配率为
50%,错误匹配点的产生规则如下,三维世界特征点仍满足条件但是相对应的pj=[uj,vj,1]
t
满足条件:
[0057]
uj∈[min{ui,i=1,...,150},max{ui,i=1,...,150}]
[0058]
和
[0059]
vj∈[min{vi,i=1,...,150},max{vi,i=1,...,150}]
[0060]
对于三维世界特征点pi=[p
ix
,p
iy
,p
iz
,1]
t
到二维图像坐标pi=[ui,vi,1]
t
投影的透视过程如图2所示,具体来说,坐标系o
w-x
wywzw
为世界坐标系,o
c-xcyczc表示相机参考坐标系,投影过程如下:
[0061]
sipi=k[r|t]piꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0062]
其中,si表示第i个点的深度,k表示已知摄像机内部标定参数,r和t分别为旋转矩阵和位置向量:
[0063][0064]
定义矩阵如下:
[0065][0066]
初始化300对特征点匹配为正确匹配点。
[0067]
步骤s2:利用正确点将非线性系统转换为线性系统并定义误差函数,对二维像素的像素坐标进行预测,具体包括:
[0068]
将公式(3)h矩阵写成向量h形式:
[0069]
h=[r
11
,r
21
,r
31
,t1,r
12
,r
22
,r
32
,t2,r
13
,r
23
,r
33
,t3]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0070]
已知有300对三维世界坐标点{p=[p
ix
,p
iy
,p
iz
,1]
t
}
i=1,...,300
到二维图像坐标{pi=[ui,vi,1]
t
}
i=1,...,300
,然后利用直接线性变换推导公式(1)如下
[0071]
mh=09×1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0072]
其中m是由正确匹配点组成,如下所示:
[0073][0074]
其中0i×j代表i乘j的零矩阵,根据图像坐标u和v将矩阵m拆写成两个矩阵mu,mv:
[0075][0076]
首先利用mu矩阵定义一个基于特征值的误差函数:
[0077][0078]
其中为待求图像预测值,符号代表使f(x)达到最小值的变量x的取值,det(x)代表矩阵x的行列式,设定:
[0079][0080]
其中代表矩阵zu第i到j行、第p到q列构成的矩阵,则以及分析得出对上述公式进行推导得到如下
[0081][0082]
通过分析可知上述公式是以一个关于一元二次方程的平方,求取这个函数的最小值,计算二元一次方程判别式如下:
[0083][0084]
如果δu≤0,则公式(7)中误差函数的解为如果δu>0,则公式(7)中误差函数的解为
[0085]
其次利用mv矩阵定义另一个基于特征值的误差函数:
[0086][0087]
其中为待求图像预测值,定义得:
[0088][0089]
其中代表矩阵zv第i到j行、第p到q列构成的矩阵,则以及分析得出对公式(7)进行推导得到如下:
[0090][0091]
分析可知上述公式是以一个关于一元二次方程的平方,求取这个函数的最小值,计算二元一次方程判别式如下:
[0092][0093]
如果δv≤0,则公式(11)中误差函数的解为如果δv>0,则公式(11)中误差函数的解为
[0094]
步骤s3:获取预测值和测量值像素坐标之间的误差,通过分析误差分布情况,确定错误点和正确点,具体包括:
[0095]
结合和得到误差序列和并定义如下和分别对应的距离误差
[0096][0097]
其中σu是由误差序列计算得到的标准差,σv是由误差序列计算得到的标准差。给定阈值δ=3,如果第i个点同时满足条件和则认为是正确点,反之则认为是错误点,最终可以从序列{pi,pj}和{pi,pj}中挑选出正确点。
[0098]
步骤s4:通过步骤s2利用正确点重新构造矩阵mu和mv进行上述s2、s3操作,并利用步骤s3重新挑选正确点,设定循环次数为30次并在每次循环中通过阈值δ乘以消减因子ρ=0.9更新阈值δ,最终实现基于矩阵特征值对错误匹配率的不断降低。
[0099]
采用本实施例的方法获得的特征点错误匹配率降低方法仿真结果分别如图3所示。由图3可知,随着迭代次数的增加,特征点错误匹配率降低,成功率增加。
[0100]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0101]
对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以对本发明的实施例做出若干变型和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。