1.本发明涉及一种测试装置,具体是一种针对湿度驱动可变色人工肌肉的在不同湿度下形变能力与变色范围测试装置。
技术背景
2.应用于软体机器人的仿生人工肌肉材料得到广泛研究,而湿度变化是自然界中最普遍的环境因素,因此基于湿度驱动的人工肌肉实现更好仿生运动成为研究热点。
3.同时可变色的仿生类人工肌肉,如变色龙皮肤、蝴蝶翅膀等动物组织器官具有随着某些外界环境因素改变导致肌肉力学姿态变化产生颜色变化的能力,成为仿生人工肌肉一个研究领域,并且该类材料具有更高的仿生价值与应用前景,可以广泛应用于如军事侦察,环境勘探等领域。
4.cn113029776公开了一种人工肌肉性能测试平台;该装置由测试基架、安装在基架上的位移传感器、安装在基架上的力传感器、用于传递输出位移和输出力的信号传递器、信号发生模块和数据采集模块组成。cn10343919公开了一种针对ipmc人工肌肉材料综合性能测试的实验平台,主要由试样夹持模块、试样拉力测试模块、试样位移测试模块、进给模块等几部分构成。但是这两种测试装置无法对基于湿度驱动的人工肌肉进行性能测试,也无法对仿生类人工肌肉进行变色性能测试,导致后续应用研究难以开展。
技术实现要素:
5.本发明的目的是克服上述技术背景缺失,提供一种针对可变色湿度驱动人工肌肉的性能测试装置,该装置能够实时检测控制测试环境周围湿度、温度变化,并且能够准确测量仿生驱动器末端位移与颜色变化;同时能测定该人动肌肉的机械性能,还具有使用方便的特点。
6.本发明提供技术方案是:
7.一种针对湿度驱动可变色人工肌肉的性能测试装置,包括用于测量人工肌肉的末端位移与偏摆弧度的位移角度测量模块、用于读取分析数据的电脑;其特征在于:该装置还包括用于固定湿度驱动可变色人工肌肉的夹持平台、用于改变环境湿度温度的恒温加热台以及用于检测人工肌肉变色情况的颜色测量模块;各测量模块均分别与所述电脑电连接。
8.所述夹持平台包括放置在桌面且带有竖直杆件的底座、通过连接头定位在竖直杆件上以调节水平方向位移与旋转角度的连杆以及用于夹取人工肌肉的夹具。
9.所述恒温加热台包括用于盛放去离子水的玻璃培养皿以及对所述离子水加热的恒温加热装置,以通过加热去离子水实现对测试环境的温湿度改变。
10.所述位移角度测量模块包括测量人工肌肉末端位移的cmos激光位移传感器,该传感器固定在支架上且其发射的激光信号对准人工肌肉末端。
11.所述位移角度测量模块还包括测量人工肌肉角度偏转的量角器;所述量角器安装夹具上,以直接读取人工肌肉的相关偏转角度。
12.所述颜色测量模块包括光纤光谱仪、检测人工肌肉变色情况的光纤探头以及连通光纤光谱仪与光纤探头的石英光纤;光纤探头固定在人工肌肉正上方,以实现对人工肌肉变色情况检测。
13.所述恒温加热台输出温度范围在25℃-100℃。
14.本发明的有益效果是:
15.1)本发明通过光电、机电信号精确获得人工肌肉位移与变色数据,同时可以通过软件实时检测,便于观察与调整。
16.2)本发明通过夹具件对人工肌肉的测试时自由长度调整,通过连杆可对人工肌肉周向姿态进行调整,调节激光位移传感器与光纤在夹持平台上的位置,可保证激光位移传感器发出的激光准确照射到人工肌肉末端同时获得较为完整光谱信号,从而对激光位移传感器与光纤光谱仪进行校准,大大减小测量误差。
17.3)本发明使用方便,可以针对湿度驱动可变色人工肌肉进行精确测量,从而准确测试人工肌肉机电与光学性能,适合推广。
附图说明
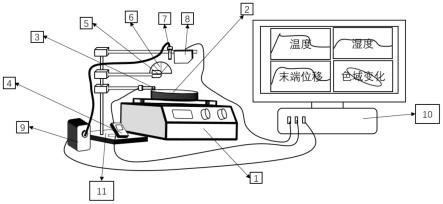
18.图1为本发明实施例的结构示意图。
19.图2为图1中湿度温度传感器的结构示意图。
20.图3为图1中颜色测量模块的结构示意图。
21.图4为图1中量角器的安装位置示意图。
22.图5为图1中激光位移传感器的结构示意图。
23.图6是本发明的操作流程示意图。
24.附图标记:
25.1.恒温加热台,2.玻璃培养皿,3.湿度温度传感器探头,4.湿度温度传感器本体,5-1.夹具,5-2.固定螺丝,5-3.人工肌肉,6.量角器,7.光纤探头,8.激光位移传感器,9.光纤光谱仪,10.电脑,11.夹持平台。
具体实施方式
26.以下结合附图所示的实试例进一步说明。
27.如图所示的针对可变色湿度驱动人工肌肉性能测试装置,包括夹持平台11、恒温加热台1、位移角度测量模块、颜色测量模块以及电脑10。
28.所述夹持平台包括放置在检测台面的底座、固定在底座上的竖直杆件、通过连接头(常规部件)连接在竖直杆件上并且可以绕水平方向位移与旋转的水平连杆以及其固定在水平连杆用于夹取人工肌肉5-3的夹具5-1(夹具为常规部件,也可用常规的文具夹子)。旋松螺丝5-2后可将人工肌肉5-3放入夹具5-1中,之后拧紧螺丝5-2,可实现对人工肌肉固定;通过调整水平连杆、连接头与夹持平台11间距离,可实现人工肌肉在水平方向位置调整。通过竖直杆件的调整实现人工肌肉的竖直高度变化,通过竖直杆件的旋转可调整人工肌肉的姿态。通过对水平、竖直与绕轴旋转姿态调整,进行传感器与测验样品的位置校准,可得到合适的测试位置与实验数据。
29.所述恒温加热台由恒温加热台1(外购的常规产品)与玻璃培养皿2构成,其中在玻
璃培养皿盛装适量去离子水,通过恒温加热台对去离子水进行蒸发,从而实现对测验环境湿度改变。湿度温度传感器探头3安装在最低杆上,最低杆水平布置并且也通过一连接头连接在竖直杆件上(图中可知是位于水平连杆的下方);湿度温度传感器探头位于最低杆的悬垂端并且伸入玻璃培养皿敞口的内侧,以利于准确测得测验环境湿度数据,然后将数据传回至湿度温度传感器本体4进行读取。
30.所述位移角度测量模块由量角器6、激光位移传感器8与构成。激光位移传感器安装在水平布置的最高杆上,最高杆也通过一连接头连接在竖直杆件上并且位于水平连杆的上方;通过最高杆的高度调整,使得激光位移传感器能准确照射至人工肌肉末端,从而对激光位移传感器进行校准,减小测量误差;作为优选,所述激光位移传感器采用cmos激光位移传感器。所述电脑10与激光位移传感器8通过数据线相连接,用于实时显示人工肌肉位移数据,便于观察。量角器固定在夹具上,通常使其圆心与夹具末端对齐后再通过胶水与夹具粘结固定;当人工肌肉在湿度驱动下偏摆达到稳定值后,可以通过量角器6直接读取得到人工肌肉偏转角度,也可以通过拍摄方式展示人工肌肉弯曲性能,从而实现对人工肌肉机械形变性能多样化数据,便于分析与应用展开。
31.所述颜色测量模块由光纤探头7、光纤与光纤光谱仪9组成。光纤探头也固定在最高杆上,由光纤传递检测数据给光纤光谱仪进行检测;通过对光纤探头角度的调整可使得光纤探头的检测范围能够覆盖人工肌肉自由长度部分;通过实验校准,可获得光纤光谱仪对人工肌肉的变色数据。所述电脑10与光纤光谱仪9通过数据线相连接,可以实时显示人工肌肉变色时光谱数据。
32.本发明的使用方式如下:
33.如图6所示,使用时,先打开湿度温度传感器进行校准。进一步,用夹具夹紧可变色湿度驱动人工肌肉,通过调节夹持平台使得其处于合适高度与姿态。再进一步启动激光位移传感器与光纤光谱仪,使得激光能够照射至人工肌肉末端,光纤光谱仪能读取人工肌肉自由长度内颜色情况,完成校准。再进一步,启动恒温加热台,基于对去离子水的蒸发实现测试环境湿度改变,观察电脑端数据,即温湿度传感器提供温度、湿度的数据,cmos激光位移传感器提供末端位移数据,光纤光谱仪提供色域变化数据,实现对可变色湿度驱动人工肌肉位移形变与颜色变化的精确测量,通过读取量角器角度变化得到人工肌肉偏摆角度,从而准确建立湿度变化与形变和变色间关系模型,为可变色的仿生软体机器人等领域研究奠定基础。
34.最后需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有多个变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。