1.本发明属于餐具回收技术领域,尤其是涉及一种碗碟分类回收装置及方法。
背景技术:
2.在学校面对学生和老师等数量较大的群体时,就餐时间段内会同时产生大量的使用餐具需要回收、清洗和分类,但目前大多数餐具分类装置只提供餐具分类功能,餐具的清洗和回收仍需要人工完成,一定程度上仍显得费时,没有实现餐具清洗、分类、回收的一体化和智能化;另外市场上有一些碗碟分类是通过机械臂完成,机械臂通过计算机程序指令实现抓取,但机械臂进行分类时会有很多问题,用机械臂分类碗碟效率非常低,对于一些客流量高的餐厅或食堂,根本无法满足食堂对餐具分类的效率要求,且机械臂的维修成本较高,器件容易损坏,使用成本较高,不符合当前市场的要求;且目前大多数餐具清洗装置未提及到自动回收系统,就需要人员来进行看管和运输,若运输不及时,可能还会出现餐具回收箱溢出甚至摔坏餐具的现象;普通的餐具清洗装置的污水采用直接排放的方式,不仅污染了环境,还浪费了大量水资源。
技术实现要素:
3.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种碗碟分类回收装置,通过设置碗碟清洗单元、碗碟分类单元、以及碗碟收集单元,实现对碗碟的清洗、分类和回收功能;且三种功能的实现为流水线作业,提高了工作效率,装置维修成本较低,且便于维修和养护。
4.为解决上述技术问题,本发明采用的技术方案是:一种碗碟分类回收装置及方法,其特征在于:包括碗碟清洗单元、设置在所述碗碟清洗单元出口端的碗碟分类单元、以及设置在所述碗碟分类单元下方且用于对碗碟进行回收的碗碟收集单元;
5.所述碗碟清洗单元包括碗碟清洗箱体和设置在所述清洗箱体底部的污水收集结构;
6.所述碗碟分类单元包括竖向设置在碗碟清洗箱出口处的分类架和多条均设置在所述分类架上的分类通道,多条所述分类通道均水平布设在所述碗碟清洗箱的出口处,所述分类通道的宽度沿远离所述碗碟清洗箱的方向逐渐增加;所述分类通道由两条分类传送带组成;
7.所述碗碟收集单元包括设置在所述分类传送带下方的过渡收集架和水平设置在所述过渡收集架底部的碗碟收集结构;所述过渡收集架上设置有多个收集通道;所述碗碟收集结构包括水平设置在所述过渡收集架底部的底板、多个均水平布设在所述底板上的收集传送带和多个均设置在所述收集传送带上的收集箱。
8.上述的一种碗碟分类回收装置,其特征在于:所述碗碟清洗箱体包括水平设置的碗碟清洗箱和多个均竖向设置在所述碗碟清洗箱底部的支撑腿,多个所述支撑腿沿所述碗碟清洗箱的周向布设,所述碗碟清洗箱和多个所述支撑腿一体成型;所述碗碟清洗箱体内
设置有传送皮带,所述传送皮带的数量和腔体的数量相等且一一对应;所述传送皮带通过传送轴水平布设在所述碗碟清洗箱体内;所述碗碟清洗箱的底部和污水收集箱连通。
9.上述的一种碗碟分类回收装置,其特征在于:所述碗碟清洗箱为两端均开口的箱体,所述碗碟清洗箱包括由前向后依次水平布设的第一箱体构件、第二箱体构件、以及第三箱体构件,所述第一箱体构件、所述第二箱体构件、以及所述第三箱体构件均连通,所述第一箱体构件、所述第二箱体构件、以及所述第三箱体构件一体成型;所述第一箱体构件的截面为直角梯形结构,所述第一箱体构件的直角腰和所述第二箱体构件的底面平齐;所述第二箱体构件和所述第三箱体构件的截面均为长方形结构。
10.上述的一种碗碟分类回收装置,其特征在于:所述第一箱体构件的入口处设置有两个红外距离传感器,两个所述红外距离传感器对称布设在所述第一箱体构件的内侧壁上,所述红外距离传感器的输出端与控制器的输入端连接;所述第一箱体构件的顶部设置有多个第一清洗喷头;
11.所述第二箱体构件和所述第三箱体构件内竖向设置有多个分隔板,所述分隔板沿所述碗碟清洗箱的长度方向布设;所述分隔板将所述第二箱体构件和所述第三箱体构件均分成多个腔体,多个腔体的数量和所述分类通道的数量相等且一一对应;
12.所述第二箱体构件内的两个腔体中均由前至后依次设置有清洗组件、消毒组件、以及第一烘干组件;所述清洗组件包括多个均设置在所述第二箱体构件的入口处且对称布设在所述腔体内侧壁上的第二清洗喷头、以及多个均设置在所述第二箱体构件顶部的第三清洗喷头;所述消毒组件包括多个均设置在所述腔体内侧壁上的紫外线消毒灯,多个所述紫外线消毒灯对称布设在所述腔体的内侧壁上;所述第一烘干组件设置在所述第二箱体构件的出口处,所述第一烘干组件包括多个均设置在所述腔体顶部的第一烘干口。
13.上述的一种碗碟分类回收装置,其特征在于:所述第三箱体构件内的两个腔体中均设置有第二烘干组件,所述第三箱体构件内的两个腔体出口处均设置有碗碟归正结构;所述第二烘干组件包括多个均设置在所述腔体顶部的第二烘干口;所述碗碟归正结构包括两个均设置在所述腔体出口处的碗碟归中组件,所述碗碟归中组件包括两个对称设置在所述腔体内的可调挡板,所述可调挡板通过液压闭门器控制。
14.上述的一种碗碟分类回收装置,其特征在于:所述污水收集结构包括设置在所述碗碟清洗箱底部的污水收集箱,所述污水收集箱的截面为直角梯形结构,所述污水收集箱的直角腰固定在所述碗碟清洗箱的底部;所述污水收集箱靠近所述第三箱体构件的端部竖向设置有过滤网;所述污水收集箱靠近所述第三箱体构件的端部连接有污水储存箱,所述污水储存箱通过连接管和所述污水收集箱连通。
15.上述的一种碗碟分类回收装置,其特征在于:所述分类架包括两个均竖向设置的分类架组件,两个所述分类架组件对称布设在所述碗碟清洗箱的出口处,两个所述分类架组件中,一个所述分类架组件通过固定耳安装在所述碗碟清洗箱上;另一个所述分类架组件和所述过渡收集架固定连接;两个所述分类架组件之间水平设置有安装杆,所述安装杆水平布设在所述收集箱的顶部,所述安装杆上设置有多个超声波传感器,多个所述超声波传感器沿所述安装杆的长度方向布设;所述超声波传感器的输出端与控制器的输入端连接;
16.所述分类架组件包括两个均竖向设置的支撑杆和转动连接在两个所述支撑杆之
间的第一转轴;所述分类传送带水平套设在两个所述第一转轴上。
17.上述的一种碗碟分类回收装置,其特征在于:所述过渡收集架包括斜向设置的收集板和两个均竖向设置在所述收集板底部的支撑板,所述收集板斜向下布设,所述收集板和两个所述支撑板一体成型,所述收集板和两个所述支撑板围成门字形结构;所述收集板上斜向设置有多个间隔板,多个所述间隔板沿所述收集板的长度方向均匀布设;所述间隔板的长度和所述收集板的宽度相等;所述间隔板将所述收集板分成多个收集通道。
18.上述的一种碗碟分类回收装置,其特征在于:所述过渡收集架的底部设置有电控箱,所述电控箱内设置有电机和电路板,所述电路板上集成有控制器和与所述控制器连接的存储器;所述电机和所述控制器的输出端连接。
19.本发明还提供了一种碗碟分类回收装置对碗碟进行分类回收的方法,其特征在于:包括以下步骤:
20.步骤一、数据存储:在存储器中存储收集箱所能存放碗碟的最大高度值;
21.步骤二、启动碗碟分类回收装置;当待清洗碗碟放入碗碟清洗箱内,红外距离传感器检测到信号时,控制器控制碗碟分类回收装置启动;
22.步骤三、清洗并烘干碗碟,过程如下;
23.步骤301、所述待清洗碗碟在所述第一箱体构件内时,所述第一清洗喷头对所述待清洗碗碟进行预清洗;
24.步骤302、所述待清洗碗碟移动至所述第二箱体构件的腔体内时,依次经过所述清洗组件、所述消毒组件、以及所述第一烘干组件,对所述待清洗碗碟进行清洗、消毒和预烘干;
25.步骤303、所述待清洗碗碟移动至所述第三箱体构件的腔体内时,先对所述待清洗碗碟进行烘干,再经由所述碗碟归正结构将所述待清洗碗碟进行归正,使归正后的所述待清洗碗碟的中心和所述分类通道的中心线重合;
26.步骤四、对碗碟分类;启动分类传送带,待分类碗碟在所述分类传送带的传送下在所述分类通道上移动,当所述待分类碗碟移动至下落位置时,所述待分类碗碟从分类通道上掉落至对应的收集通道上;其中,所述下落位置为所述分类通道的宽度不小于所述待分类碗碟的直径的位置;
27.步骤五、回收碗碟,过程如下;
28.步骤501、回收碗碟:掉落至所述收集通道上的所述待分类碗碟自由滑落至所述收集通道底部对应的收集箱内;
29.步骤502、检测收集箱内碗碟的高度:步骤401中收集箱上方的超声波传感器对该收集箱内的碗碟高度进行检测,当所述超声波传感器检测到的碗碟高度信号值不小于所述存储器中存储的存放碗碟的最大高度值时,启动所述收集传送带,将装满的所述收集箱从所述收集通道的底部移开,并将下一个所述收集箱移至所述收集通道的底部;
30.步骤六、碗碟分类回收装置休眠;当红外距离传感器继续检测到信号时,重复步骤三至步骤五;当红外距离传感器未检测到信号时,控制器控制碗碟分类回收装置休眠。
31.本发明与现有技术相比具有以下优点:
32.1、本发明通过设置碗碟清洗单元、碗碟分类单元、以及碗碟收集单元,实现对碗碟的清洗、分类和回收功能;且三种功能的实现为流水线作业,提高了工作效率,装置维修成
本较低,且便于维修和养护。
33.2、本发明通过利用设置在所述清洗箱体底部的污水收集结构,对清洗过碗碟的污水进行回收利用,避免大量水资源的浪费,实现了水资源的循环利用。
34.3、本发明中利用所述分类传送带围成的分类通道,通过对分类传送带间隙的调控,以由小到大的顺序,在分类通道的不同间隙里分离出对应碗碟尺寸的餐具,来达到对碗碟进行分类的效果,实现对碗碟按尺寸的划分,各种尺寸的碗碟通过分类通道的运输,省去了人工的搬运和分类,节省了人力,提高了分类效率。
35.4、本发明分类通道的不同尺寸区间和所述收集通道相对应,不同尺寸的碗碟在经由分类通道后到达对应的收集通道内,后续通过对收集箱的检测,能实时了解到收集箱内碗碟的堆放情况,能对已满的收集箱进行更换,加快了工作效率,减少对人力的消耗。
36.综上所述,本发明通过设置碗碟清洗单元、碗碟分类单元、以及碗碟收集单元,实现对碗碟的清洗、分类和回收功能;且三种功能的实现为流水线作业,提高了工作效率,装置维修成本较低,且便于维修和养护。
37.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
38.图1为本发明的结构示意图。
39.图2为本发明的后视图。
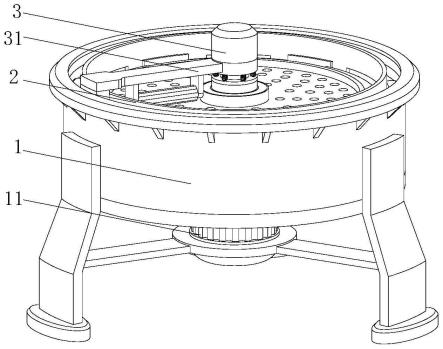
40.图3为本发明碗碟清洗单元的结构示意图。
41.图4为本发明碗碟归正结构和碗碟清洗箱的连接关系图。
42.图5为本发明的电路原理框图。
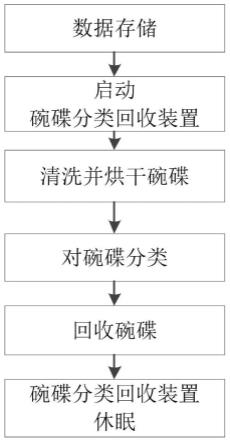
43.图6为本发明方法的流程框图。
44.附图标记说明:
45.1—碗碟清洗箱;
ꢀꢀꢀꢀꢀꢀꢀꢀ
2—支撑腿;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3—红外距离传感器;
46.4—第一清洗喷头;
ꢀꢀꢀꢀꢀꢀ
5—第二清洗喷头;
ꢀꢀꢀꢀꢀꢀ
6—第三清洗喷头;
47.7—紫外线消毒灯;
ꢀꢀꢀꢀꢀꢀ
8—第一烘干口;
ꢀꢀꢀꢀꢀꢀꢀꢀ
9—第二烘干口;
48.10—可调挡板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—液压闭门器;
ꢀꢀꢀꢀꢀꢀꢀ
12—污水收集箱;
49.13—过滤网;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14—第一转轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15—固定耳;
50.16—收集箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17—间隔板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18—收集板;
51.19—支撑板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20—底板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21—第二转轴;
52.22—分类传送带;
ꢀꢀꢀꢀꢀꢀꢀ
23—支撑杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24—电控箱;
53.25—控制器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26—安装杆;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
27—超声波传感器;
54.28—收集传送带;
ꢀꢀꢀꢀꢀꢀꢀ
29—存储器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30—侧板;
55.31—分隔板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32—连接带;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33—连接管;
56.34—传送皮带;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35—传送轴。
具体实施方式
57.如图1至图5所示,本发明包括碗碟清洗单元、设置在所述碗碟清洗单元出口端的碗碟分类单元、以及设置在所述碗碟分类单元下方且用于对碗碟进行回收的碗碟收集单
元;
58.所述碗碟清洗单元包括碗碟清洗箱体和设置在所述清洗箱体底部的污水收集结构;
59.所述碗碟分类单元包括竖向设置在碗碟清洗箱1出口处的分类架和多条均设置在所述分类架上的分类通道,多条所述分类通道均水平布设在所述碗碟清洗箱1的出口处,所述分类通道的宽度沿远离所述碗碟清洗箱1的方向逐渐增加;所述分类通道由两条分类传送带22组成;
60.所述碗碟收集单元包括设置在所述分类传送带22下方的过渡收集架和水平设置在所述过渡收集架底部的碗碟收集结构;所述过渡收集架上设置有多个收集通道;所述碗碟收集结构包括水平设置在所述过渡收集架底部的底板20、多个均水平布设在所述底板20上的收集传送带28和多个均设置在所述收集传送带28上的收集箱16。
61.实际使用时,通过设置碗碟清洗单元、碗碟分类单元、以及碗碟收集单元,实现对碗碟的清洗、分类和回收功能;且三种功能的实现为流水线作业,提高了工作效率,装置维修成本较低,且便于维修和养护。
62.本发明通过利用设置在所述清洗箱体底部的污水收集结构,对清洗过碗碟的污水进行回收利用,避免大量水资源的浪费,实现了水资源的循环利用。
63.本发明中利用所述分类传送带22围成的分类通道,通过对分类传送带22间隙的调控,以由小到大的顺序,在分类通道的不同间隙里分离出对应碗碟尺寸的餐具,来达到对碗碟进行分类的效果,实现对碗碟按尺寸的划分,各种尺寸的碗碟通过分类通道的运输,省去了人工的搬运和分类,节省了人力,提高了分类效率。
64.本发明分类通道的不同尺寸区间和所述收集通道相对应,不同尺寸的碗碟在经由分类通道后到达对应的收集通道内,后续通过对收集箱16的检测,能实时了解到收集箱16内碗碟的堆放情况,能对已满的收集箱16进行更换,加快了工作效率,减少对人力的消耗。
65.需要说明的是,所述底板20的两端均水平设置有第二转轴21,所述收集传送带28套设在所述第二转轴21上;
66.如图1、图2和图3所示,本实施例中,所述碗碟清洗箱体包括水平设置的碗碟清洗箱1和多个均竖向设置在所述碗碟清洗箱1底部的支撑腿2,多个所述支撑腿2沿所述碗碟清洗箱1的周向布设,所述碗碟清洗箱1和多个所述支撑腿2一体成型;所述碗碟清洗箱体内设置有传送皮带34,所述传送皮带34的数量和腔体的数量相等且一一对应;所述传送皮带34通过传送轴35水平布设在所述碗碟清洗箱体内;所述碗碟清洗箱1的底部和污水收集箱12连通。
67.实际使用时,所述碗碟清洗箱1的底部开设有漏水口和污水收集箱12连通,清洗碗碟的污水可通过漏水口流入所述污水收集箱12内进行回收利用。所述传送皮带34设置在所述漏水口的上方,清洗碗碟的污水从传送皮带34的间隙漏入所述漏水口处,进而流入污水收集箱12内。
68.本实施例中,所述碗碟清洗箱1为两端均开口的箱体,所述碗碟清洗箱1包括由前向后依次水平布设的第一箱体构件、第二箱体构件、以及第三箱体构件,所述第一箱体构件、所述第二箱体构件、以及所述第三箱体构件均连通,所述第一箱体构件、所述第二箱体构件、以及所述第三箱体构件一体成型;所述第一箱体构件的截面为直角梯形结构,所述第
一箱体构件的直角腰和所述第二箱体构件的底面平齐;所述第二箱体构件和所述第三箱体构件的截面均为长方形结构。
69.本实施例中,所述第一箱体构件的入口处设置有两个红外距离传感器3,两个所述红外距离传感器3对称布设在所述第一箱体构件的内侧壁上,所述红外距离传感器3的输出端与控制器25的输入端连接;所述第一箱体构件的顶部设置有多个第一清洗喷头4;
70.所述第二箱体构件和所述第三箱体构件内竖向设置有多个分隔板31,所述分隔板31沿所述碗碟清洗箱1的长度方向布设;所述分隔板31将所述第二箱体构件和所述第三箱体构件均分成多个腔体,多个腔体的数量和所述分类通道的数量相等且一一对应;
71.所述第二箱体构件内的两个腔体中均由前至后依次设置有清洗组件、消毒组件、以及第一烘干组件;所述清洗组件包括多个均设置在所述第二箱体构件的入口处且对称布设在所述腔体内侧壁上的第二清洗喷头5、以及多个均设置在所述第二箱体构件顶部的第三清洗喷头6;所述消毒组件包括多个均设置在所述腔体内侧壁上的紫外线消毒灯7,多个所述紫外线消毒灯7对称布设在所述腔体的内侧壁上;所述第一烘干组件设置在所述第二箱体构件的出口处,所述第一烘干组件包括多个均设置在所述腔体顶部的第一烘干口8。
72.实际使用时,所述红外距离传感器3的主要作用是为了检测是否有碗碟进入所述第一箱体构件内;当长时间传感器没有检测到碗碟的投放时,系统会进入休眠模式,直到有碗碟再次投递时才会开始工作。所述第一清洗喷头4、所述第二清洗喷头5、以及所述第三清洗喷头6均与外界的水箱或者水源连接,所述第一清洗喷头4和所述第二清洗喷头5中喷出的水中混合了一定比例的碱性洗涤剂。所述第三清洗喷头6中喷出的水为清水,对碗碟进行最后的清洗。餐具经过紫外线消毒灯7的照射之后,可对其进行杀菌消毒。所述第一烘干口8需要外接热风机对所述第二箱体构件内的碗碟进行吹干,除去水分。
73.本实施例中,所述第三箱体构件内的两个腔体中均设置有第二烘干组件,所述第三箱体构件内的两个腔体出口处均设置有碗碟归正结构;所述第二烘干组件包括多个均设置在所述腔体顶部的第二烘干口9;所述碗碟归正结构包括两个均设置在所述腔体出口处的碗碟归中组件,所述碗碟归中组件包括两个对称设置在所述腔体内的可调挡板10,所述可调挡板10通过液压闭门器11控制。
74.实际使用时,所述第二烘干口9需要外接热风机对所述第三箱体构件内的碗碟进行吹干,除去水分。所述碗碟归正结构对碗碟进行归中的工作是对碗碟进行分类前的准备工作,是为了使碗碟的中心能够准确无误进入传送带中,采用四个可调挡板10对碗碟的中心进行纠正。两个可调挡板10组成一个出口,当碗碟碰到可调挡板10时,对可调挡板10进行压缩,在达到对应直径时,碗碟会通过可调挡板10准确进入传送带上。
75.本实施例中,所述污水收集结构包括设置在所述碗碟清洗箱1底部的污水收集箱12,所述污水收集箱12的截面为直角梯形结构,所述污水收集箱12的直角腰固定在所述碗碟清洗箱1的底部;所述污水收集箱12靠近所述第三箱体构件的端部竖向设置有过滤网13;所述污水收集箱12靠近所述第三箱体构件的端部连接有污水储存箱,所述污水储存箱通过连接管33和所述污水收集箱12连通。
76.实际使用时,过滤网13可以过滤清洗污水中体积较大的固体垃圾,对残渣进行定期的清理,以防过滤网13发生堵塞,导致处理过程受阻。过滤网13选用的是mbr工艺中的过滤膜,利用mbr工艺可以有效的分离废水中的大分子油脂与有机物,使回收水中的各项指标
达到国家管理标准,大幅度降低了餐饮行业的废水处理成本,减少了本装置由于污水残渣处理不当而引起的相关机械故障,延长机械的使用寿命,减少对资源的损耗。
77.本实施例中,所述分类架包括两个均竖向设置的分类架组件,两个所述分类架组件对称布设在所述碗碟清洗箱1的出口处,两个所述分类架组件中,一个所述分类架组件通过固定耳15安装在所述碗碟清洗箱1上;另一个所述分类架组件和所述过渡收集架固定连接;两个所述分类架组件之间水平设置有安装杆26,所述安装杆26水平布设在所述收集箱16的顶部,所述安装杆26上设置有多个超声波传感器27,多个所述超声波传感器27沿所述安装杆26的长度方向布设;所述超声波传感器27的输出端与控制器25的输入端连接;
78.所述分类架组件包括两个均竖向设置的支撑杆23和转动连接在两个所述支撑杆23之间的第一转轴14;所述分类传送带22水平套设在两个所述第一转轴14上。
79.本实施例中,所述过渡收集架包括斜向设置的收集板18和两个均竖向设置在所述收集板18底部的支撑板19,所述收集板18斜向下布设,所述收集板18和两个所述支撑板19一体成型,所述收集板18和两个所述支撑板19围成门字形结构;所述收集板18上斜向设置有多个间隔板17,多个所述间隔板17沿所述收集板18的长度方向均匀布设;所述间隔板17的长度和所述收集板18的宽度相等;所述间隔板17将所述收集板18分成多个收集通道。
80.实际使用时,两个所述支撑板19之间还竖向设置有侧板30,所述侧板30和所述支撑板19一体成型。实际使用时,每个所述收集通道的底部均设置有一个收集箱16,当位于所述收集通道底部的收集箱16堆满时,所述收集传送带28转动,带动收集满的收集箱16移开,将下一个空的收集箱16移动至该所述收集通道的底部继续进行堆放;堆放满的所述收集箱16则由工作人员进行后续处理。
81.本实施例中,所述过渡收集架的底部设置有电控箱24,所述电控箱24内设置有电机和电路板,所述电路板上集成有控制器25和与所述控制器25连接的存储器29;所述电机和所述控制器25的输出端连接。
82.实际使用时,所述电机用于控制所述第一转轴14、所述第二转轴21和传送轴35,所述电机通过连接带32和所述第一转轴14连接,所述电机通过连接带和所述第二转轴21连接。
83.如图1至图6所示的一种碗碟分类回收装置对碗碟进行分类回收的方法,包括以下步骤:
84.步骤一、数据存储:在存储器29中存储收集箱16所能存放碗碟的最大高度值;
85.步骤二、启动碗碟分类回收装置;当待清洗碗碟放入碗碟清洗箱1内,红外距离传感器3检测到信号时,控制器25控制碗碟分类回收装置启动;
86.步骤三、清洗并烘干碗碟,过程如下;
87.步骤301、所述待清洗碗碟在所述第一箱体构件内时,所述第一清洗喷头4对所述待清洗碗碟进行预清洗;
88.步骤302、所述待清洗碗碟移动至所述第二箱体构件的腔体内时,依次经过所述清洗组件、所述消毒组件、以及所述第一烘干组件,对所述待清洗碗碟进行清洗、消毒和预烘干;
89.步骤303、所述待清洗碗碟移动至所述第三箱体构件的腔体内时,先对所述待清洗碗碟进行烘干,再经由所述碗碟归正结构将所述待清洗碗碟进行归正,使归正后的所述待
清洗碗碟的中心和所述分类通道的中心线重合;
90.步骤四、对碗碟分类;启动分类传送带22,待分类碗碟在所述分类传送带22的传送下在所述分类通道上移动,当所述待分类碗碟移动至下落位置时,所述待分类碗碟从分类通道上掉落至对应的收集通道上;其中,所述下落位置为所述分类通道的宽度不小于所述待分类碗碟的直径的位置;
91.步骤五、回收碗碟,过程如下;
92.步骤501、回收碗碟:掉落至所述收集通道上的所述待分类碗碟自由滑落至所述收集通道底部对应的收集箱16内;
93.步骤502、检测收集箱内碗碟的高度:步骤401中收集箱16上方的超声波传感器27对该收集箱16内的碗碟高度进行检测,当所述超声波传感器27检测到的碗碟高度信号值不小于所述存储器29中存储的存放碗碟的最大高度值时,启动所述收集传送带28,将装满的所述收集箱16从所述收集通道的底部移开,并将下一个所述收集箱16移至所述收集通道的底部;
94.步骤六、碗碟分类回收装置休眠;当红外距离传感器3继续检测到信号时,重复步骤三至步骤五;当红外距离传感器3未检测到信号时,控制器25控制碗碟分类回收装置休眠。
95.以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。