1.本发明涉及光控波束形成芯片自动控制技术领域。具体涉及一种基于并行爬山算法的光控波束形成芯片幅相自动控制方法。
背景技术:
2.近年来,随着微波光子技术和相控阵技术的高速发展,光控相控阵技术受到的注视日益增加。光控相控阵中光控波束形成芯片具有尺寸小、成本低、集成度高、兼容性高、大带宽、高速率等优点,而基于大规模光控波束形成芯片的使用如何快速自动化实现波束形成目标技术研究的一个重要方向。
3.在光控波束形成芯片中,需要为每个波束信号配备独立的幅相控制和反馈单元,而随着波束信号数量的增加,所需幅相控制器件增加,反馈网络也随之越来越繁复。因此,针光控波束形成芯片的控制方法也逐渐复杂。在算法设计过程中,设计复杂度高、可扩展性低、研发周期高、成本高,很大程度上限制了光控相控阵的广泛引用。为解决上述问题,本发明采用并行爬山算法实现波束形成芯片的自动控制技术。目前,还未见到采用自动控制技术实现波束形成芯片控制功能的相关报道。
4.由此可见,目前光控波束形成芯片标校与控制方法复杂、时间稳定性低、通道间幅相一致性的稳定性差等问题正在阻碍光控相控阵的广泛应用。
技术实现要素:
5.本发明提供基于并行爬山算法的光控波束形成芯片幅相自动控制方法,用以解决目前光控波束形成芯片标校与控制方法复杂度高、时间稳定性低、通道间幅相一致性的稳定性差等技术问题。
6.本发明提供基于并行爬山算法的光控波束形成芯片幅相自动控制方法,通过对波束形成网络中大规模光开关阵列依照目标指令及反馈参数同时进行自动控制及监测,实现通道间相位一致性的控制。并且通过延时线后光衰减器(voa)控制方法,实现对通道间幅度一致性的控制。此方法可以实时控制幅相一致性,且不随时间、环境变化而恶化。
7.本发明采用技术方案为:
8.一种基于并行爬山算法的光控波束形成芯片幅相自动控制方法,包括以下步骤:
9.(1)上位机接收指令,指令包括波束形成目标时延参数以及开关指令,并将指令组包传输给fpga数字处理模块;
10.(2)fpga数字处理模块接收到指令后进行解包,并随机选取一个控制参数,对控制模块下发控制数据;
11.(3)控制模块接收到控制数据后,向延时阵列输出控制信号;
12.(4)延时阵列中的光开关根据控制信号开始变换状态,延时阵列中的探测器监测光开关的状态,并通过反馈模块采集探测器的信号,反馈给fpga数字处理模块;
13.(5)fpga数字处理模块选定一个方向为步进的正方向,并设定大步进值作为当前
步进值;
14.(6)按当前步进值调整控制参数,同时判断调整后的控制参数是否超过控制数据范围,当超过控制范围时,方向取反;重新对控制模块下发控制数据,控制模块接收到控制数据后,向延时阵列输出控制信号;
15.(7)延时阵列中的光开关根据控制信号开始变换状态,延时阵列中的探测器监测光开关的状态,并通过反馈模块采集探测器的信号,反馈给fpga数字处理模块;
16.(8)fpga数字处理模块根据两次反馈数据,并结合波束形成目标时延参数,调整步进的方向,返回步骤(6)直至两次控制的反馈数据涵盖设定的最大值或最小值;
17.(9)在最后调整的步进范围内,设定小步进值作为当前步进值,返回步骤(6)直至完成目标获取;
18.(10)完成目标获取后,采集延时阵列后光衰减器阵列两端的反馈数据,以光衰减器前探测器反馈数据最小一路为基准控制其他路进行衰减,以光衰减器后探测器反馈数据为判断依据进行通道幅度一致性检验及控制反馈;
19.(11)对控制参数持续进行设定的小范围扰动,通过反馈数据判断最大或最小值对应控制参数是否有漂移,当出现漂移时重新进行反馈控制。
20.其中,步骤(8)具体为:
21.fpga数字处理模块根据两次反馈数据进行判断,如果步进后的反馈数据大于步进前的反馈数据,则将反馈数据与延时参数进行对比,如果延时参数中对应控制目标的反馈数据大于步进后的反馈数据,则方向不变,如果延时参数中对应控制目标的反馈数据小于步进后的反馈数据,则方向取反;返回步骤(6)直至两次控制的反馈数据涵盖最大值或最小值;
22.如果步进后的反馈数据小于步进前的反馈数据,则将反馈数据与延时参数进行对比,如果延时参数中对应控制目标的反馈数据大于步进后的反馈数据,则方向取反,如果延时参数中对应控制目标的反馈数据小于步进后的反馈数据,则方向不变;返回步骤(6)直至两次控制的反馈数据涵盖最大值或最小值。
23.本发明与背景技术相比具有如下特点:
24.1.本发明提出光控波束形成芯片幅相自动控制方法,可以通过控制、反馈及数据处理,实现光控波束形成芯片的控制自动化。相较已有光控波束形成芯片在使用前需进行耗时较长的标校操作,本发明提出的技术方案,自动化程度高、控制方法简单、可以实现短耗时波束形成目标实现。
25.2.本发明提出光控波束形成芯片幅相自动控制方法,在完成自动控制后,会实时反馈器件状态,并不停刷新控制参数,保证波束形成芯片内每一个器件工作在最佳状态。
26.3.本发明提出光控波束形成芯片幅相自动控制方法,基于结构简单、扩展性高的控制算法,因此对光控波束形成芯片的兼容性高。当切换光控波束形成芯片后,只需修正芯片组成规模等参数,即可完成新的光控波束形成芯片自动控制。
27.4.本发明提出光控波束形成芯片幅相自动控制方法,对器件状态进行实时反馈控制,因此,针对环境、碰撞、芯片恶化等影响器件参数的问题兼容性极高。在系统状态发生变化后,可以自动切换到最佳状态,非常适用于无人操作的工作环境。
28.5.本发明提出光控波束形成芯片幅相自动控制方法,对通道间幅度一致性进行实
时反馈控制,大幅提高光控波束形成芯片通道幅度一致性,保障了波束形成准确性。
附图说明
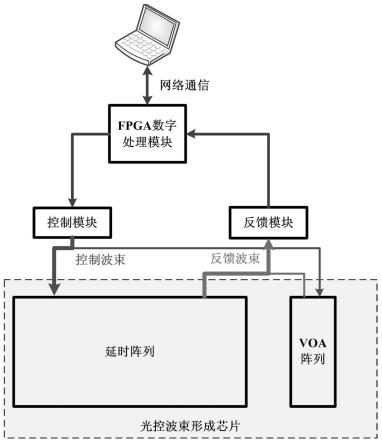
29.图1为基于并行爬山算法的光控波束形成芯片幅相自动控制方法控制系统组成结构图。
30.图2为基于并行爬山算法的光控波束形成芯片幅相自动控制中光控波束形成芯片结构图。
具体实施方式
31.波束形成芯片多通道幅相自动反馈控制系统结构如图1所示,包括上位机、fpga数字处理模块、控制模块、反馈模块以及受控的光波束形成芯片,光波束形成芯片包括延时阵列和voa阵列。
32.系统工作流程为,通过上位机与用户进行指令交互,输入波束形成延时参数后,通过网络接口将指令打包为数据包传输给fpga数字处理模块。fpga数字处理模块接收指令后,通过基于反馈参数的并行爬山算法,通过控制模块实现对光控波束形成芯片的控制。其中反馈参数为光控波束形成芯片中探测器输出信号,经反馈模块对信号进行采集后传输给fpga数字处理模块。
33.系统中光控波束形成芯片架构如图2所示包含延时阵列以及voa阵列两部分,延时阵列由多条光延时线组成,每条延时线具备多个光开关和光延时单元,并且每个光开关后集成一个片上探测器用以进行控制结构反馈。
34.一种基于并行爬山算法的光控波束形成芯片幅相自动控制方法,包括以下步骤:
35.(1)上位机接收指令,指令包括波束形成目标时延参数以及开关指令,并将指令组包传输给fpga数字处理模块;
36.(2)fpga数字处理模块接收到指令后进行解包,并随机选取一个控制参数,对控制模块下发控制数据;
37.(3)控制模块接收到控制数据后,向延时阵列输出控制信号;
38.(4)延时阵列中的光开关根据控制信号开始变换状态,延时阵列中的探测器监测光开关的状态,并通过反馈模块采集探测器的信号,反馈给fpga数字处理模块;
39.(5)fpga数字处理模块选定一个方向为步进的正方向,并设定大步进值作为当前步进值;
40.(6)按当前步进值调整控制参数,同时判断调整后的控制参数是否超过控制数据范围,当超过控制范围时,方向取反;重新对控制模块下发控制数据,控制模块接收到控制数据后,向延时阵列输出控制信号;
41.(7)延时阵列中的光开关根据控制信号开始变换状态,延时阵列中的探测器监测光开关的状态,并通过反馈模块采集探测器的信号,反馈给fpga数字处理模块;
42.(8)fpga数字处理模块根据两次反馈数据,并结合波束形成目标时延参数,调整步进的方向,返回步骤(6)直至两次控制的反馈数据涵盖设定的最大值或最小值;具体为:
43.fpga数字处理模块根据两次反馈数据进行判断,如果步进后的反馈数据大于步进前的反馈数据,则将反馈数据与延时参数进行对比,如果延时参数中对应控制目标的反馈
数据大于步进后的反馈数据,则方向不变,如果延时参数中对应控制目标的反馈数据小于步进后的反馈数据,则方向取反;返回步骤(6)直至两次控制的反馈数据涵盖最大值或最小值;
44.如果步进后的反馈数据小于步进前的反馈数据,则将反馈数据与延时参数进行对比,如果延时参数中对应控制目标的反馈数据大于步进后的反馈数据,则方向取反,如果延时参数中对应控制目标的反馈数据小于步进后的反馈数据,则方向不变;返回步骤(6)直至两次控制的反馈数据涵盖最大值或最小值。
45.(9)在最后调整的步进范围内,设定小步进值作为当前步进值,返回步骤(6)直至完成目标获取;
46.(10)完成目标获取后,采集延时阵列后光衰减器阵列两端的反馈数据,以光衰减器前探测器反馈数据最小一路为基准控制其他路进行衰减,以光衰减器后探测器反馈数据为判断依据进行通道幅度一致性检验及控制反馈;
47.(11)对控制参数持续进行设定的小范围扰动,通过反馈数据判断最大或最小值对应控制参数是否有漂移,当出现漂移时重新进行反馈控制。
48.由此可见,本发明所提供的技术方案中,实现光控波束形成芯片的自动控制,通过基于反馈的自动控制技术,省去标校时间,大幅提高波束形成实现速度。同时,由于本发明提供技术方案对器件进行实时监测,通过反馈参数同步进行控制,保证了光控波束形成芯片工作时通道间幅相一致性,具有简单快速自动化、易于拓展、通道间幅相一致性高、抗干扰能力强等优点。具有非常广泛的应用价值与实用性技术效果。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。