技术特征:
1.一种车道线特征检测方法,其特征在于,包括以下步骤:s1、获取目标区域的图像信息,并按行将所述图像信息其分隔多组像素集;s2、选取其中一行像素集,建立该组像素集的亮度分布图;s3、获取亮度分布图中每组波峰的高度h及宽度w,计算高度与宽度比值,记为该组波峰的高宽比;s4、判断高宽比大于第一预设阈值时,标记该组波峰为车道线特征波,获取所述特征峰波内所有像素点为车道线特征点;s5、重复步骤s3-s4,获取所有车道线特征波内的车道线特征点;s6、重复步骤s2-s5,获取所有像素集的车道线特征点,将车道线特征点进行反演成像,输出车道线特征图。2.根据权利要求1所述的一种车道线特征检测方法,其特征在于:所述建立该组像素集的亮度分布图,包括以下步骤:s2-1、获取所述像素集内的所有像素点,s2-2、获取像素点的亮度信息和位置信息,建立曲线图;s2-3、将曲线图进行均值滤波,获得亮度分布图。3.根据权利要求1所述的一种车道线特征检测方法,其特征在于:所述获取亮度分布图中每组波峰的高度及宽度,包括以下步骤:s3-1、获取波峰的峰值点,标记a(x
a
,y
a
)点;s3-2、获取a点相邻两组波谷的谷值点,标记其中较高的谷值点为b(x
b
,y
b
)点;s3-3、过b点做水平线,与该组波峰相交,相交点标记c点(x
c
,y
c
,);s3-4、计算波峰高度h=y
a-y
b
,计算波峰宽度w=|x
b-x
c
|。4.根据权利要求1所述的一种车道线特征检测方法,其特征在于:所述判断高宽比大于第一预设阈值时,标记该组波峰为车道线特征波,包括以下步骤:s4-1、当高宽比大于第一预设阈值时,获取该组波峰像素点数量;s4-2、判断所述像素点数量大于第二预设阈值时,标记该组峰波为车道线特征波。5.一种服务端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至4任一项所述的一种车道线特征检测方法的步骤。6.一种计算机可读存储介质,所述计算机可读存储介质有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述的一种车道线特征检测方法的步骤。
技术总结
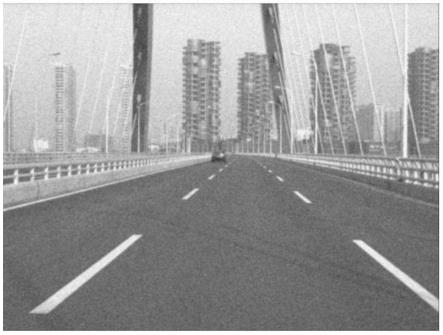
本申请公开了一种车道线特征检测方法,包括以下步骤:S1、获取目标区域的图像信息,并按行将所述图像信息其分隔多组像素集;S2、选取其中一行像素集,建立该组像素集的亮度分布图;S3、获取亮度分布图中每组波峰的高度H及宽度W,计算高度与宽度比值,记为该组波峰的高宽比;S4、判断高宽比大于第一预设阈值时,标记该组波峰为车道线特征波,获取所述特征峰波内所有像素点为车道线特征点;S5、重复步骤S3-S4,获取所有车道线特征波内的车道线特征点;S6、重复步骤S2-S5,获取所有像素集的车道线特征点,将车道线特征点进行反演成像,输出车道线特征图。特征图。特征图。
技术研发人员:张羽 张昊 雷韬 尚轲
受保护的技术使用者:天津津航技术物理研究所
技术研发日:2022.10.20
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。