技术特征:
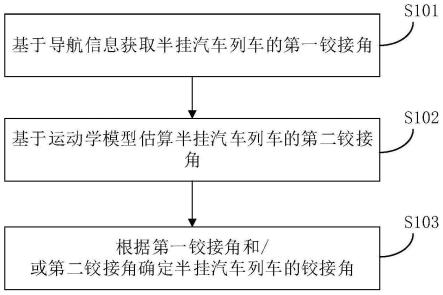
1.一种半挂汽车列车的铰接角在线估计方法,其特征在于,所述方法包括:基于导航信息获取所述半挂汽车列车的第一铰接角;基于运动学模型估算所述半挂汽车列车的第二铰接角;根据所述第一铰接角和/或所述第二铰接角确定所述半挂汽车列车的铰接角。2.根据权利要求1所述的方法,其特征在于,所述基于导航信息获取所述半挂汽车列车的第一铰接角,包括:基于导航信息获取牵引车的第一航向角和挂车的第二航向角;获取所述第一航向角与所述第二航向角之间的差值得到所述第一铰接角。3.根据权利要求2所述的方法,其特征在于,所述基于导航信息获取牵引车的第一航向角和挂车的第二航向角,包括:分别通过设置在所述牵引车上的第一导航测量仪和陀螺仪获取所述牵引车的航向信息,得到第一航向信息和第二航向信息;对所述第一航向信息和所述第二航向信息进行融合处理,得到所述第一航向角;通过设置在所述挂车上的第二导航测量仪获取所述挂车的航向信息,得到所述第二航向角。4.根据权利要求1所述的方法,其特征在于,所述基于运动学模型估算所述半挂汽车列车的第二铰接角,包括:获取牵引车的纵向速度;根据所述牵引车的纵向速度和铰接角速度模型估算得到所述第二铰接角,其中,所述铰接角速度模型是预先根据所述半挂汽车列车的运动学模型生成的。5.根据权利要求4的方法,其特征在于,铰接角速度模型通过下述公式进行表达:其中,为所述第二铰接角的变化速度,λ为所述第二铰接角,ν
x1
为所述牵引车的纵向速度,δ为所述牵引车的前轮转角,l1为所述牵引车前轴中心到后轴中心的距离,l2为所述牵引车与挂车之间的铰接点到所述挂车后轴中心的距离,d为所述牵引车后轴中心到所述铰接点的距离。6.根据权利要求4所述的方法,其特征在于,通过设置在所述牵引车上的陀螺仪获取所述牵引车的纵向速度。7.根据权利要求1-6任一项所述的方法,其特征在于,根据所述第一铰接角和/或所述第二铰接角确定所述半挂汽车列车的铰接角,包括:若成功获得所述第一铰接角,则对所述第一铰接角和所述第二铰接角进行融合处理得到所述半挂汽车列车的铰接角;若未成功获得所述第一铰接角,则将所述第二铰接角作为所述半挂汽车列车的铰接角。8.一种计算机可读存储介质,其特征在于,其上存储有半挂汽车列车的铰接角在线估计程序,该半挂汽车列车的铰接角在线估计程序被处理器执行时实现根据权利要求1-7任一项所述的半挂汽车列车的铰接角在线估计方法。
9.一种半挂汽车列车,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的半挂汽车列车的铰接角在线估计程序,所述处理器执行所述程序时,实现根据权利要求1-7任一项所述的半挂汽车列车的铰接角在线估计方法。10.一种半挂汽车列车的铰接角在线估计装置,其特征在于,所述装置包括:第一估计模块,用于基于导航信息获取所述半挂汽车列车的第一铰接角;第二估计模块,用于基于运动学模型估算所述半挂汽车列车的第二铰接角;确定模块,用于根据所述第一铰接角和/或所述第二铰接角确定所述半挂汽车列车的铰接角。
技术总结
本发明公开了一种半挂汽车列车及其铰接角在线估计方法、装置、存储介质。其中,方法包括:基于导航信息获取半挂汽车列车的第一铰接角;基于运动学模型估算半挂汽车列车的第二铰接角;根据第一铰接角和/或第二铰接角确定半挂汽车列车的铰接角。由此,不仅能够提高铰接角的测量精度,还能够避免在使用单一测量方法时,由于测量方法发生失效而无法实现对铰接角进行测量的情况发生,且该方法简单、适用性强、成本低以及安装方便。成本低以及安装方便。成本低以及安装方便。
技术研发人员:邢文彦 张静
受保护的技术使用者:如果科技有限公司
技术研发日:2022.09.29
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。