1.本技术涉及故障自动检测技术领域,具体涉及一种针对鼠笼式异步电机的故障及负载试验系统。
背景技术:
2.工厂中电机数量众多,其安全运行对于工厂正常生产至关重要。电机用电量占工厂总用电量的60%-70%。虽然电机结构简单,但是其构成的电机系统非常复杂。电机作为动力转换装置,需要配合机械装置在恶劣的工业环境中工作,随着服务时间的增长,极易发生故障。电机故障将导致设备停转、产线停工,甚至造成人员和机械伤害。
3.随着工业化进程的不断深入以及新能源汽车的推广,电机与使用人员的接触也更为紧密,这使得因电机引起得人员伤害事故不断攀升。而电机的早期故障完全可以通过技术手段实现可靠诊断并及时维护,以减少事故的发生。且通过对电机现有故障的研究可以帮助电机在生产过程中不断地改进工艺,提高其使用寿命。故近年来针断电机状态监测和故障诊断技术开发越来越受欢迎。
4.状态监测与故障诊断技术的开发离不开对电机的长期监测与故障研究(例如文献:cn112600362a、cn103835882a等方案)。在实际生产和生活中并不允许设备长期带病运行,这就使得相关技术的研发依赖于故障试验。
5.而现有的故障试验台多采用健康电机作为负载,无法进行模拟实际运行中负载的多样性和连续性。且由于试验电机多处于带伤或带病状态,试验系统为防止试验故障扩散多要求试验为短期试验,无法完整的模拟故障的演化过程,且需要试验人员对试验进程高度关注。
6.这使得对电机在故障状态下的劣化过程研究极为困难。加之部分针对电机的故障模拟未考虑到实际故障中存在的故障耦合状况,使得基于此开发的技术在实际使用中效果不佳。
7.为改进上述问题,本专利研究设计了一种针对鼠笼式异步电机的故障及负载试验系统。
技术实现要素:
8.本技术的目的在于针对上述现有技术的不足,提供一种针对鼠笼式异步电机的故障及负载试验系统。试验系统实现了整个故障试验的可编程和自动化运行,解决了目前针对电机进行故障试验时存在的人员长期值守、故障变化不连续、负载的多样性和连续性模拟以及数据采样困难的问题。
9.本技术的技术方案如下:
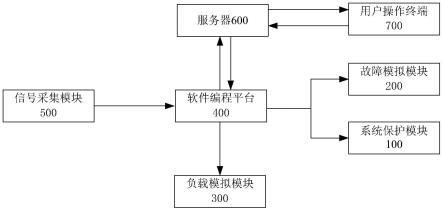
10.一种针对鼠笼式异步电机的故障及负载试验系统,其包括:故障模拟模块、负载模拟模块、软件编程平台、信号采集模块;
11.所述故障模拟模块用于接收软件编程平台的故障模拟信号对故障程度进行调整;
12.所述负载模拟模块用于接收软件编程平台的负载调节信号,模拟负载变化;
13.所述软件编程平台用于设定故障的类型、严重程度以及负载变化;
14.所述信号采集模块用于对单点三轴振动信号进行采样、电机的三相电流进行采样、对定子三相绕组的温度进行采样。
15.进一步,所述软件编程平台的编程方式以时间为主线,操作人员仅需创建部分关键节点的试验状态系统即可利用插值算法自动补充区间内的运行参数。
16.进一步,故障模拟模块包括:定子故障模拟电路、转子断条模拟电路、转子偏心模拟机构组成;
17.故障模拟模块接受来自软件编程平台的故障模拟信号,并控制定子故障模拟电路、转子断条模拟电路、转子偏心模拟机构对故障程度进行调整,实现对故障发展过程的控制;
18.其中,定子故障模拟电路将定子的三相绕组的各匝线圈分别接至矩阵开关,通过对矩阵开关的选择控制可模拟不同程度的匝间短路、相间短路;
19.其中,转子断条模拟电路为:在转子生产过程中采用涨断工艺,使得转子条在应力作用下自然断裂并在断裂处增加绝缘片进行转子断条的模拟;同时在断口处设置受控短接片,模拟不同程度的断条故障;受控短接片的控制线通过转轴中心的暗孔引出至外侧的滑环,并通过滑环与所述的故障模拟模块连接,控制不同的短接片接通,继而实现了转子在运行过程中断条故障程度的控制;
20.其中,转子偏心模拟机构由两套伺服系统构成,转子两侧的转子轴承保持架底部安装有丝杆,伺服电机通过丝杆连接转轴保持架,丝杆由伺服系统驱动,控制轴承保持架的上升和下降,通过两侧保持架的升降可模拟转子轴线与定子轴线的不同位置,进而模拟转子动偏心与静偏心。
21.进一步,负载模拟模块由磁粉制动器及磁粉张量控制器组成;
22.其中,磁粉制动器采用蛇形联轴器与电机转子连接,磁粉张量控制器接受软件编程平台的负载调节信号,调节磁粉制动器的制动张力模拟负载的变化。
23.进一步,所述的信号采集模块包括:三轴加速度计、霍尔电流传感器、热电阻及采样与通信电路;
24.其中,三轴加速度计根据试验需求设置在电机的任意位置上,用于测量单点的三轴振动信号;
25.其中,霍尔电流传感器用于对三相电流进行采样;
26.其中,热电阻用于采集定子三相绕组的温度;
27.其中,采样与通信电路负责采集三轴加速度计、霍尔电流传感器、热电阻的信号,同时发送至软件编程平台。
28.还包括:系统保护模块;
29.所述系统保护模块用于对电力系统中存在的三相不平衡、相间短路、漏电、超温故障按照预设故障程度进行保护,确保电机在故障情况下的正常运行。
30.还包括:系统保护模块;系统保护模块由电源侧三相电流互感器ct1,ct2,ct3、三相不平衡度分析器ct_an、隔离变压器tv、温度监测回路tem、零序电流互感器ct0及控制回路组成;
31.其中,所述电源侧三相电流互感器ct1,ct2,ct3负责采集电网侧的各相电流至三相不平衡度分析仪,进行不平衡度分析,当不平衡度超过设定上限时停止电机故障模拟试验;
32.其中,所述隔离变压器tv用于防止电机相间短路试验时引起电网侧的系统保护以及防止人员触电事故的发生;
33.其中,所述温度监测回路tem对隔离变压器的铁芯温度进行监测,当铁芯温度超过85℃时打开风扇对铁芯进行降温,当温度超过120℃时为保护隔离变压器的绝缘良好将停止试验;
34.其中,所述零序电流互感器ct0用于相间漏电流的监测,当漏电流超过设定上限时为保护试验设备即人员安全将切断或降低相间短路程度。
35.进一步,还包括:服务器、用户操作终端;
36.服务器与软件编程平台双向信号连接,服务器与用户操作终端双向信号连接;
37.软件编程平台通过通信网络向服务器发送试验进程信息以及信号采集模块传递而来的信息,然后服务器将上述信息传递给用户操作终端,向用户实时报告试验进程和试验平台运行状态;
38.同时,操作人员通过服务器向软件编程平台设定故障的类型、严重程度以及负载变化,编程方式以时间为主线,操作人员仅需创建部分关键节点的试验状态系统即可利用插值算法自动补充区间内的运行参数。
39.本技术的有益效果在于:
40.第一,现有的故障试验台多采用电机作为负载,无法模拟实际运行中负载的多样性和连续性。且由于试验电机多处于带伤或带病状态,为防止试验故障扩散多要求试验为短期试验,无法完整的模拟故障的演化过程,且需要试验人员对试验进程高度关注。这使得对电机在故障状态下的劣化过程的研究变得极为困难。加之部分针对电机的故障模拟未考虑到实际故障中存在的故障耦合状况,使得基于此开发的电机故障诊断技术在实际使用中效果不佳。为此本技术提出针对鼠笼式异步电机的故障及负载试验系统,设计了专用的保护系统,以满足电机在故障状态下的长期运行。
41.第二,本技术的试验系统可以根据用户编程实现电机由健康至完全故障的劣化过程以及负载的动态变化模拟,能够根据研究人员的需求对电机的各种故障(匝间短路、相间短路、转子断条、转子偏心)严重程度及负载的动态变化进行模拟,同时可采集对应的单点三轴振动信号(可预先设定电极的任意部位)、三相电流信号、定子各相绕组温度,使用物联网技术将试验数据上传至云端,并可通过物联网平台发送试验进程信息并接受试验调整信息,无需人员值守。
42.具体而言,可通过编程方式控制电机故障的发展及负载的动态变化。该试验系统由系统保护模块、故障模拟模块、负载模拟模块、软件编程平台、信号采集模块以及基于物联网的信息通知平台组成,以离线或在线编程的方式满足用户电机由健康至完全故障的劣化过程以及负载的动态变化模拟。此外该系统可采集对应的单点三轴振动信号、三相电流信号、定子各相绕组温度,使用物联网技术将试验数据上传至云端,并可通过物联网平台发送试验进程信息并接受试验调整信息,无需人员值守。
附图说明
43.下面结合附图中的实施例对本技术作进一步的详细说明,但并不构成对本技术的任何限制。
44.图1是本技术的针对鼠笼式异步电机的故障及负载试验系统的总体构造图。
45.图2是本技术的系统保护模块的设计图。
46.图3是本技术的定子故障模拟电路的设计图。
47.图4是本技术的转子断条模拟电路的设计图。
48.图5是本技术的转子偏心模拟机构的设计图。
49.图1-5附图标记说明如下:
50.系统保护模块100、故障模拟模块200、负载模拟模块300、软件编程平台400、信号采集模块500、服务器600、用户操作终端700。
具体实施方式
51.实施例一:一种针对鼠笼式异步电机的故障及负载试验系统。
52.总体构造
53.如图1示意了针对鼠笼式异步电机的故障及负载试验系统的构造,其包括:故障模拟模块200、负载模拟模块300、软件编程平台400、信号采集模块500;
54.所述故障模拟模块200用于接收软件编程平台400的故障模拟信号对故障程度进行调整;
55.所述负载模拟模块300用于接收软件编程平台400的负载调节信号,模拟负载变化;
56.所述软件编程平台400用于设定故障的类型、严重程度以及负载变化;
57.所述信号采集模块500用于对单点三轴振动信号进行采样(单点可为电机的任意部位)、电机的三相电流进行采样、对定子三相绕组的温度进行采样。
58.故障模拟模块200
59.故障模拟模块200接受来自软件编程平台400的故障模拟信号,并控制定子故障模拟电路、转子断条模拟电路、转子偏心模拟机构对故障程度进行调整,实现对故障发展过程的控制;
60.故障模拟模块200由定子故障模拟电路、转子断条模拟电路、转子偏心模拟机构组成。
61.如图3所示,定子故障模拟电路将定子的三相绕组的各匝线圈分别接至矩阵开关,通过对矩阵开关的选择控制可模拟不同程度的匝间短路、相间短路。具体而言,定子故障模拟电路是将定子三相绕组的各相线圈,按照相同的匝比进行抽头,并将抽头接至矩阵开关。矩阵开关根据所述软件编程平台400的信号进行控制,不同开关的自动闭合可模拟不同程度的匝间短路及相间短路故障。当t系列开关闭合的情况下可通过k系列开关模拟不同程度的相间短路故障,当t系列开关断开的情况下可通过k系列开关模拟不同程度的匝间短路故障。
62.如图4所示,为模拟真实的转子断条故障,不同于常用的打孔破坏转子条,在转子生产过程中采用涨断工艺,使得转子条在应力作用下自然断裂,在断裂处增加绝缘片进行
转子断条的模拟,避免了打孔工艺造成的转子偏心,影响试验分析。在断口处设置受控短接片,模拟不同程度的断条故障。具体而言,在转子生产过程中采用涨断工艺,使得转子条在应力作用下自然断裂并在断裂处增加绝缘片进行转子断条的模拟。同时在断口处设置受控短接片。受控短接片的控制线通过转轴中心的暗孔引出至外侧的滑环,并通过滑环与所述的故障模拟模块连接,由所述故障模拟模块根据编程信号控制不同的短接片接通,继而实现了转子在运行过程中断条故障程度的控制。
63.如图5所示,转子偏心模拟机构由两套伺服系统构成,转子两侧的转子轴承保持架底部安装有丝杆,丝杆可由伺服系统驱动,控制轴承保持架的上升和下降,通过两侧保持架的升降可模拟转子轴线与定子轴线的不同位置,进而模拟转子动偏心与静偏心。具体而言,转子偏心模拟机构由两套伺服系统构成。伺服电机通过丝杆连接转轴保持架,并接收所述故障模拟模块的信号,控制丝杆的上下运行。当两侧保持架使得转子轴心与定子轴心不重合,且转子运行过程中保持架不动作时可模拟转子静偏心,当保持架动态变化时可模拟动偏心。
64.负载模拟模块300
65.所述的负载模拟模块300接收软件编程平台400的负载调节信号。
66.负载模拟模块由磁粉制动器及磁粉张量控制器组成。
67.磁粉制动器采用蛇形联轴器与电机转子连接,保证负载端不会引起电机转子偏心故障。磁粉张量控制器接受软件编程平台400的负载调节信号,调节磁粉制动器的制动张力模拟负载的变化。
68.磁粉张量控制器接受软件编程平台400的负载调节信号,调节磁粉制动器的制动张力以模拟负载的变化,相比于采用直流电机模拟的负载,其调节范围更为平滑,动态响应更好,且自身不会因电机转矩输出的急速变化而损伤。
69.软件编程平台400
70.所述软件编程平台400的核心功能是:设定故障的类型、严重程度以及负载变化;编程方式以时间为主线,操作人员仅需创建部分关键节点的试验状态系统即可利用插值算法自动补充区间内的运行参数;
71.所述软件编程平台400根据系统硬件自带的通信串口向故障模拟模块300、负载模拟模块200发送控制指令,接收信号采集模块500的数据并上传至服务器600。
72.信号采集模块500
73.所述的信号采集模块500由三轴加速度计、霍尔电流传感器、pt1000热电阻及采样与通信电路组成。
74.三轴加速度计采用adxl345体积小、分辨率高,相比于振动传感器可同时采集一点x,y,z三个方向的振动信号,其加速度范围可达(-6,6)mm/s2,可根据试验需求任意调整其在电机上的安装位置。
75.霍尔电流传感器采用零磁通高精度电流传感器,利用霍尔效应进行三相电流采样,无磁滞效应,1ppm精度,温漂仅为1ppm/k,动态性能好。
76.pt1000热电阻负责采集定子三相绕组的温度,采样上限为650℃,不会因电机高温而损坏。
77.采样与通信电路负责采集各传感器的信号,同时发送至软件编程平台400进行处
理。
78.需要说明的是:
79.一种针对鼠笼式异步电机的故障及负载试验系统还可以包括:系统保护模块100;所述系统保护模块100可对电力系统中存在的三相不平衡、相间短路、漏电、超温等故障按照预设故障程度进行保护,确保电机在故障情况下的正常运行。
80.系统保护模块100
81.图2给出了系统保护模块100的具体设计。系统保护模块100由电源侧三相电流互感器ct1,ct2,ct3、三相不平衡度分析器ct_an、隔离变压器tv、温度监测回路tem、零序电流互感器ct0及控制回路组成。
82.所述电源侧三相电流互感器ct1,ct2,ct3负责采集电网侧的各相电流至三相不平衡度分析仪,进行不平衡度分析,当不平衡度超过设定上限(默认10%)时停止电机故障模拟试验(所述三相不平衡度分析仪使用一体式100/5保护级三相电流互感器采集电网侧的各相电流对三相电流进行不平衡度分析,当不平衡度超过可设置上限时停止电机故障模拟试验)。
83.所述隔离变压器tv用于防止电机相间短路试验时引起电网侧的系统保护以及防止人员触电事故的发生(所述隔离变压器的一次侧与二次侧电压相同,运行容量为试验电机短路容量的两倍。当电机发生相间短路故障时可阻止故障引起电网侧的系统保护以及防止人员触电事故的发生)。
84.所述温度监测回路tem对隔离变压器的铁芯温度进行监测,当铁芯温度超过85℃时打开风扇对铁芯进行降温,当温度超过120℃时为保护隔离变压器的绝缘良好将停止试验(所述温度监测回路通过热敏电阻tem对隔离变压器的铁芯温度进行监测,首先通过控制风扇对铁芯进行降温,当温度超过风扇调节上限后,为保护隔离变压器的绝缘良好将停止试验)。
85.所述零序电流互感器ct0用于相间漏电流的监测,当漏电流超过设定上限时为保护试验设备即人员安全将切断或降低相间短路程度(采用5/1测量级互感器,可监测毫安级相间漏电流,当漏电流超过设定安全值上限时切断或降低相间短路程度)。
86.需要说明的是:
87.一种针对鼠笼式异步电机的故障及负载试验系统还可以包括:服务器600、用户操作终端700;
88.服务器600与软件编程平台400双向信号连接,服务器600与用户操作终端700双向信号连接;
89.软件编程平台400可通过通信网络向服务器600发送试验进程信息以及信号采集模块500传递而来的信息,进而,服务器600将上述信息传递给用户操作终端700,向用户实时报告试验进程和试验平台运行状态;
90.同时,操作人员通过服务器600向软件编程平台400设定故障的类型、严重程度以及负载变化,编程方式以时间为主线,操作人员仅需创建部分关键节点的试验状态系统即可利用插值算法自动补充区间内的运行参数。
91.以上所举实施例为本技术的较佳实施方式,仅用来方便说明本技术,并非对本技术作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本技术所提技
术特征的范围内,利用本技术所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本技术的技术特征内容,均仍属于本技术技术特征的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。