技术特征:
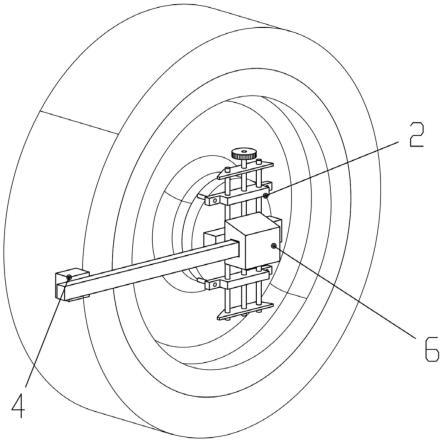
1.一种轮式装甲战车车轮前束调校装置,其特征在于:包括主机电脑(1)、两个带长度测量装置的底盘转向拉臂测量装置(3)、六个测量探头、六个将探头固定在轮辋上的专用夹具(2),所述探头通过自带的轴与夹具(2)孔配合安装到待测量的汽车轮辋上,所述探头包括前左探头、前右探头、中左探头、中右探头、后左探头、后右探头。所述的六个探头包含了十个测量模组,呈u型状态对车辆形成半封闭测量,每个检测模组均包括光敏位移传感器(14)和红外发射灯(15),所述前左探头有向前伸出的杆状结构,并在杆状结构前端安装有左右水平方向的第一测量模组(4),所述前左探头还安装有水平向后的第三测量模组(6),所述第三检测模组(6)和第一检测模组(4)的检测方向垂直,所述右前探头和前左探头对称设置,所述前右探头有向前伸出的杆状结构,并在杆状结构前端安装有左右水平方向的第二测量模组(5),所述前右探头还安装有水平向后的第四测量模组(7),所述第四检测模组(7)和第二检测模组(5)的检测方向垂直,所述中左探头安装有水平向前的第五测量模组(8)和水平向后的第七测量模组(10),所述中右探头安装有水平向前的第六测量模组(9)和水平向后的第八测量模组(10),所述后左探头安装有水平向前的第九测量模组(12),所述后右探头安装有水平向前的第十测量模组(13),所述第一测量模组(4)和第二测量模组(5)组构成左右对射测量链环,所述第三测量模组(6)和第五测量模组(8)构成前后对射测量链环,所述第四测量模组(7)和第六测量模组(9)构成前后对射测量链环,所述第七测量模组(10)和第九测量模组(12)构成前后对射测量链环,所述第八测量模组(11)和第十测量模组(13)构成前后对射测量链环。2.根据权利要求1所述的一种轮式装甲战车前束调校装置,其特征在于:所述的六个探头,每个探头内部安装有二维角度传感器和一个主控制板,所述二维角度传感器用于测量探头轴向的水平和垂直角度的大小,所述的主控制板用于对各个测量模组和角度传感器的采样、计算、内部电源控制、窗口显示和数据传送。所述的主控制板带有无线数据传送模块,用于和主机电脑(1)的数据传送。3.根据权利要求1所述的一种轮式装甲战车前束调校装置,其特征在于:所述专用夹具(2)与轮辐接触的部分安装有磁铁。4.根据权利要求1所述的一种轮式装甲战车车轮前束调校装置,其特征在于:所述转向拉臂测量装置(3)的长度测量装置采用机械刻度或带有位移传感器的电子测量系统。5.根据权利要求4所述的一种轮式装甲战车车轮前束调校装置,其特征在于:所述转向拉臂测量装置(3)包括底座(301)、螺杆(302)、移动标(303),所述螺杆(302)和底座(301)螺纹连接,所述移动标(303)和螺杆(302)的末端通过螺钉限位并转动连接,所述移动标(303)滑动设置在底座(301)侧面的槽内,所述底座(301)在槽口处刻有标尺,所述转向拉臂测量装置(3)的底座(301)安装在车架底面的凸处,其螺杆(302)朝向转向臂处。6.一种轮式装甲战车车轮前束调校方法,其特征在于:包括以下步骤:步骤一、测量底盘转向臂的横向位置和距离,并通过转动方向盘和调整转向臂调整螺栓到位,将两个转向拉臂测量装置(3)调整好同一个伸缩距离后将转向臂固定,步骤二、将前左探头、前右探头、中左探头、中右探头、后左探头、后右探头通过夹具(2)安装到汽车轮辋上,设定各探头分别为安装在a、b、c、d、e、f六个车轮上,六个探头上安装有十个测量模组,每个测量模组均带有光敏位移传感器(14)和红外发射灯(15),组成实录测量链环,测量和换算出所对应的角度依次为∠1、∠2、∠3、∠4、∠5、∠6、∠7、∠8、∠9、∠
10;步骤三、运用集合算法:先分别以a、b、c、d围成的四边形计算a、b、c、d的前束角,该前束角以一条a、b轮连接轴线重点和c、d轮连的轴线中点的连线的虚拟中心线ii为基准,同样再单独以c、d、e、f围城的四边形计算c、d、e、f四轮的前束角,该前束角以一条c、d轮连的轴线中点和e、f轮连的轴线中点的连线的虚拟中心线i为基准,其中c和d探头在四边形abcd和四边形cdef测量值是采用不同的光敏位移传感器(14)信号计算出的,具体如下:设定a、b、c、d围城的四边形构成的中心线为ii,那么直线ac和直线bd的夹角即轮距差u=(∠1 ∠2)-(∠3 ∠4),那么以中心线ii为基准,可以计算出:a轮的前束角toa=∠3 u/2b轮的前束角tob=∠4 u/2c轮的前束角toc=∠5 u/2d轮的前束角tod=∠6 u/2设定c、d、e、f围城的四边形构成的中心线为i:那么直线ce和直线df的夹角轮距差u’=u-[∠7 ∠8)-(∠5 ∠6)],那么以中心线i为基准,可以计算出:c轮的前束角toc’=∠7 u’/2d轮的前束角tod’=∠8 u’/2e轮的前束角toe=∠9 u’/2f轮的前束角tof=∠10 u’/2计算中心线ii和中心线i的基准差值θ为:θ=toc-toc’=tod
’‑
tod将a、b、c、d四轮的前束角统一到以c、d、e、f围城的四边形中心线i为基准,则以后四轮中心线i为基准的六轮的前束角分别为:a轮的前束角toa=∠3 u/2-θb轮的前束角tob=∠4 u/2 θc轮的前束角toc=∠5 u/2-θd轮的前束角tod=∠6 u/2 θe轮的前束角toe=∠9 u’/2f轮的前束角tof=∠10 u’/2。
技术总结
本发明涉及军队车辆后勤保障对特种战车的检修养护技术领域,具体涉及一种轮式装甲战车车轮前束调校装置及其调校方法,包括六个探头所含的十个光敏测量模组和六个二维角度传感器,并配有智能处理控制主板和计算机处理系统还包括配合测量和调整的底盘转向拉臂测量装置。本发明通过角度换算可以进行军用战车三桥、四桥以及多桥的同步测量,便将基于不同基准的单轮前束角补偿到同一个基准线上,将差值计算到每个车轮的前束角中,便能得到统一基准的六轮、八轮前束角,方便车辆维护调整,本发明结构简单,测量方便。测量方便。测量方便。
技术研发人员:胥国林 胥腾 陈信陪
受保护的技术使用者:盐城高玛电子设备有限公司
技术研发日:2022.10.28
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。