基于retinex的图像预处理方法
技术领域
1.本发明涉及视觉检测图像处理技术领域,尤其是一种基于retinex的图像预处理方法。
背景技术:
2.在电池铝壳图像检测的实际工程应用中,由于铝壳材质反光特性和外部光照的影响,很难得到亮度和稳定性一致的图像效果。当图像效果不稳定时,进行图像检测就很容易出现各种误检漏检问题。
3.传统的图像处理商业库软件和开源库均未有此类图像预处理方法,也没有专门针对此实际工程应用的算法。故此类图像预处理方法或算法只能根据实际问题现场开发。
技术实现要素:
4.本发明要解决的技术问题是:提供一种基于retinex的图像预处理方法,解决传统电池铝壳明暗场图像进行图像检测过程中,由于光照不均,图像效果不稳定,较难进行下一步的检测,影响检测效果的问题。
5.本发明解决其技术问题所采用的技术方案是:一种基于retinex的图像预处理方法,包括以下步骤,
6.s1、采集产品原始图像,提取原始产品暗场图像最大亮度值,对图像进行log域计算并计算灰度均值;
7.s2、根据retinex理论,使用改进的全局自适应算法对log域图像进行增强;
8.s3、针对增强后的图像进行归一化处理;
9.s4、进行去噪和滤波预处理;
10.s5、完成预处理后,使用阈值分割,图像区域提取和图像区域开闭预算以及区域筛选操作,完成感兴趣区域的提取。
11.进一步的说,本发明所述的步骤s1中,提取原始产品暗场图像最大亮度值公式为:其中s
max
为图像灰度最大值,s
(x,y
)为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,i为整个图像域;对图像进行log域计算并计算灰度均值公式为:其中为log域灰度均值结果,s
(x,y)
为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,n为图像像素总个数即图像尺寸大小。
12.再进一步的说,本发明所述的步骤s2中,改进的全局自适应算法公式为:其中g
(x,y)
为最终得到的(x,y)对应位置的最终结果,s
(x,y)
为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,为灰度均值,s
max
为图像灰度最大值,λ为算法全局自适应调参增益系数。
13.更进一步的说,本发明所述的步骤s3中,归一化处理公式为:其中l
(x,y)
为归一化后的(x,y)对应位置的最终结果即增强后的图像像素值,g为g
(x,y
)集合组成的图像域。
14.又进一步的说,本发明所述的步骤s4中,预处理方式为高斯滤波、均值滤波、中值滤波或双边滤波。
15.本发明的有益效果是,解决了背景技术中存在的缺陷,利用retinex算法理论,使用改进的全局自适应算法对电池铝壳图像进行增强,然后通过去噪和滤波算法,对图像进行初步预处理,针对预处理后的图像使用阈值分割,开闭运算和blob分析提取感兴趣区域再进行检测;本发明能够提高电池铝壳实际生产检测过程中检测效果和精度,同时降低漏检误检几率。
附图说明
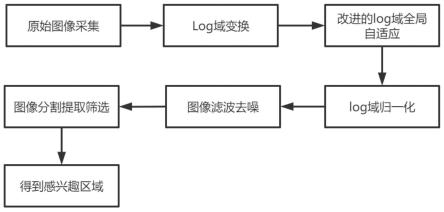
16.图1是本发明的流程示意图。
具体实施方式
17.现在结合附图和优选实施例对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
18.如图1所示的一种基于retinex的图像预处理方法,步骤包括原始图像采集、log域变换、改进的log域全局自适应、log域归一化、图像滤波去噪、图像分割提取筛选,从而得到感兴趣区域。本实施例针对电池铝壳图像进行处理。
19.下面进行详细说明。
20.1、提取原始铝壳暗场图像最大亮度值,对图像进行log域计算并计算灰度均值。
21.提取原始铝壳暗场图像最大亮度值公式如下:
[0022][0023]
其中s
max
为图像灰度最大值,s
(x,y)
为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,i为整个图像域。
[0024]
对图像进行log域计算并计算灰度均值公式如下:
[0025][0026]
其中为log域灰度均值结果,s(
x,y
)为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,n为图像像素总个数即图像尺寸大小,δ为一极小值,本文取0.000001,主要为了避免输入像素值为0时,导致的log计算无穷大情况。
[0027]
2、利用retinex技术思想,使用改进的全局自适应算法。对log域图像进行增强,具体步骤如下:
[0028]
对log域得到的灰度均值返回原图像值域,具体操作为求指数,指数和对数互为逆运算。公式如下:
[0029][0030]
其中为转化为原始图像域的图像灰度均值,为log域图像灰度均值。
[0031]
由于目前现有的log域全局自适应算法。计算结果值域均在[0,1]区间内,当进行log运算和除法运算时,添加一个改进的增益系数λ,能很大的影响最终算法全局自适应效果。本实施例根据实际工程应用,对传统log域全局自适应算法进行改进,改进的log域全局自适应核心计算公式如下:
[0032][0033]
其中g
(x,y)
为最终得到的(x,y)对应位置的最终结果,s
(x,y)
为原始图像像素值,(x,y)为像素值在图像中对应位置坐标,为灰度均值,由公式(2)和(3)得到,s
max
为图像灰度最大值,由公式(1)得到,λ为算法全局自适应调参增益系数,针对电池铝壳检测,进行了大量实际测试,得到的经验参考值。
[0034]
3、遍历完成整张图像后,得到一个g(
x,y
)的结果集合。对该结果集合进行归一化处理,将值域扩充到像素值域[0,255],归一化后的图像即为最终的增强后的图像,能很好的进行下一步的预处理和检测。
[0035]
归一化具体流程如下:
[0036]
首先计算出g
(x,y)
的结果集合中的最大和最小值。
[0037][0038][0039]
其中g
max
、g
min
为结果集合中的最大值和最小值,g为g
(x,y)
集合组成的图像域。
[0040]
利用归一化公式计算出对应位置的归一化后结果。
[0041]
核心归一化公式如下:
[0042][0043]
其中l
(x,y)
为归一化后的(x,y)对应位置的最终结果即增强后的图像像素值,g
(x,y)
为公式(4)得到的结果,(x,y)为像素值在图像中对应位置坐标,g
max
、g
min
为公式(5)、(6)得到的结果。
[0044]
4、当完成图像增强后,对增强后的暗场图像进行去噪处理,由于设备采集不可避免会产生图像噪声,进行图像增强处理后,部分噪声可能会得到增强,为了避免图像噪声的干扰,使用图像去噪算法完成图像去噪,具体去噪算法可使用高斯滤波、均值滤波、中值滤波、双边滤波等方法完成去噪。具体可直接使用商业库、开源库、或自己研发相关的算法。
[0045]
5、当图像去噪滤波完成后,使用全局二值化算法,提取图像区域,对提取的图像区域进行开闭运算和连通域等操作,并进行区域筛选,完成感兴趣区域的提取。至此完成图像的预处理操作。具体二值化和区域类筛选提取等算法可直接使用商业库、开源库、或自己研发相关的算法。
[0046]
针对电池铝壳明暗场图像亮度不均的问题,本方法通过调整全局自适应增益系数λ,得到一个最适合电池铝壳的明暗场图像效果,能很好地解决电池铝壳明暗场图像亮度不
均、图像效果不稳定的问题。本方法能得到稳定的电池铝壳明暗场图像效果。并且由本方法得到的电池铝壳明暗场图像,能很好的提升后续电池铝壳的检测效果,降低误检和漏检几率。
[0047]
以上说明书中描述的只是本发明的具体实施方式,各种举例说明不对本发明的实质内容构成限制,所属技术领域的普通技术人员在阅读了说明书后可以对以前所述的具体实施方式做修改或变形,而不背离发明的实质和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。