技术特征:
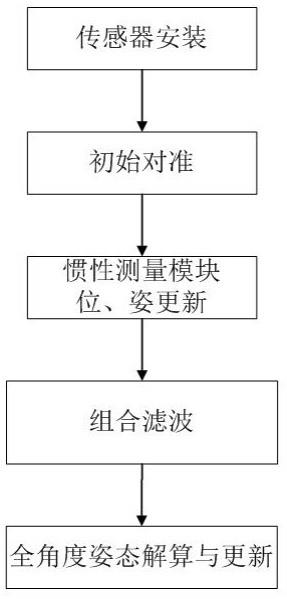
1.一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,包括以下步骤:a、传感器安装;将惯性测量模块与光电吊舱的光电转台固连,将gnss天线安装在飞机顶部;b、初始对准;利用gnss天线的位置信息,惯导系统进行静态初始对准,得到惯性测量模块位姿初始值;c、惯性测量模块位姿信息更新;利用惯性测量模块输出的角增量和加速度增量数据,通过捷联惯导姿态、速度和位置更新算法计算并更新惯性测量模块的位置、速度和姿态矩阵;d、组合滤波;采用自适应扩展卡尔曼滤波器,利用惯性测量模块的速度、位置信息和gnss天线速度、位置进行卡尔曼滤波,估算惯性器件误差;e、全角度姿态角解算与更新:采用全角度双欧法进行正反欧拉角计算,并实时更新姿态角。2.根据权利要求1所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于:步骤a中,惯性测量模块的x、y和z轴分别与飞机的纵向轴、横向轴和天向轴保持平行。3.根据权利要求1所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于:惯性测量模块位姿初始值包括姿态、方位、速度和位置。4.根据权利要求1所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,步骤e的具体过程为:e1)输入角速度和正、反欧拉角;e2)根据θ角判断正、反欧拉若为正欧拉,则对下面公式1)进行积分求解正欧拉角,并利用转换关系求解反欧拉角;1);若为反欧拉,则对下面公式2)进行积分,求解反欧拉角,并利用转换关系求解正欧拉角;
2);式中,、和为惯性测量模块输出的x、y、z三个轴向的角速度;e3)对计算得到的正欧拉角和反欧拉角进行取舍,得到更新后的正欧拉角和反欧拉角;e4)将更新后的正欧拉角和反欧拉角输入至步骤e1)中。5.根据权利要求4所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,步骤e2)中,转换关系通过设置转换矩阵实现:,其中,为航向角,为俯仰角,为横滚角。6.根据权利要求5所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,通过正欧拉角求解反欧拉角的具体过程为:取,反欧拉角的计算方法如下:,以上各式中取0或1,对应两种结果。
7.根据权利要求6所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,由反欧拉角求解正欧拉角的具体过程如下:取,正欧拉角的计算方法如下: ;以上各式中取0或1,对应两种结果。8.根据权利要求7所述的一种适用于垂直下视航空吊舱的姿态测量方法,其特征在于,正、反欧拉角取舍的具体过程为:首先定义如下函数,在微分方程求解过程中,设某时刻各正欧拉角分别为:,反欧拉角分别为:,则下一时刻正欧拉角设为:,反欧拉角设为:,令,上式中,取0或1;由正欧拉角求解反欧拉角时,如果,则有,
,并以该反欧拉角进行更新,得到更新后的反欧拉角;如果,则有;由反欧拉角求解正欧拉角时,如果,则有,,并以该正欧拉角进行更新,得到更新后的正欧拉角;如果,则有。
技术总结
本发明公开了一种适用于垂直下视航空吊舱的姿态测量方法,包括以下步骤:A、传感器安装;将惯性测量模块与光电吊舱的光电转台固连,将GNSS天线安装在飞机顶部;B、初始对准;利用GNSS天线的位置信息,惯导系统进行静态初始对准,得到惯性测量模块位姿初始值;C、惯性测量模块位姿信息更新;D、组合滤波;采用自适应扩展卡尔曼滤波器,对惯性测量模块的位姿信息和GNSS天线信息进行组合滤波,实时补偿惯性误差;E、全角度姿态角解算与更新:采用全角度双欧法进行正反欧拉角计算,并实时更新姿态角。本发明当俯仰角越趋近
技术研发人员:张帅 鲁建伟 程文明 叶飞 彭华 郭慧 刘兴维 任嘉航
受保护的技术使用者:浙江航天润博测控技术有限公司
技术研发日:2022.11.24
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。