1.本发明涉及机器人的技术领域,尤其涉及一种自动高速弹道标定方法。
背景技术:
2.日常生活中,除了近在眼前就能看到的景物外,很多时候需要看到很远处的事物,但肉眼观察是有一定的限制的,太远的东西能看到确难以看清。在简单观看、观察情况下,通过望远镜可以放大物体倍率,拉近远处的事物。而像一些发射类行为,需要精确的瞄准目标,因而需要瞄准镜这类的辅助工具来帮助我们。瞄准镜一般是军事国防上装配在发射装置上的辅助设计装置。不论是光学瞄准镜,还是夜视瞄准镜,都已成为军事上必不可少的瞄准装置。在军事训练及其他准备工作中,各类发射装备均需要瞄准装置,该装置是确保军事任务中能够精确瞄准与高效执行的关键所在。因此,对于军事任务中,如何精确、高效瞄准与锁定物体目标点位是亟需解决的问题。
3.依靠瞄准镜,在远距离下手动瞄准目标是最常用、便捷的传统瞄准方式,发射人员通过该方式在特定场景下能够快速完成发射任务。然而,由于每个发射人员的对瞄准技能的掌握程度不同,在使用时的经验不一,并且有些部门不一定持有相应职业证书。随着发射装置不断更新,更为精密复杂装备也对专业工作人员提出了更高的要求,日常的瞄准任务面临如下难点:(1)虽然手动瞄准对发射人员身体素质要求很高,但有些任务环境恶劣,难以长时间稳定维持瞄准姿态,影响瞄准精度;(2)当目标点位发生改变时,发射人员需要重新对目标点位进行瞄准与估计,无法高效、快速的完成任务。
技术实现要素:
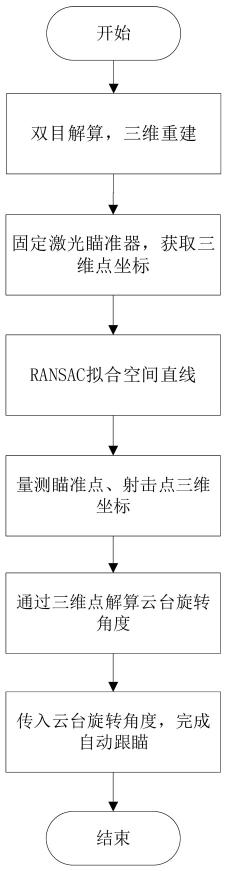
4.为解决背景技术中瞄准对发射人员和环境的要求,并且快速的完成空间中弹道的估算,为此,本发明提出了一种自动高速弹道标定方法,具体方案如下:s1、在负载平台固定传感器,进行双目相机解算,重建双目空间坐标系下的三维点坐标,建立相机几何模型;s2、固定激光瞄准器到负载平台,采集若干激光光线不同深度的三维点坐标;s3、基于ransac算法,拟合激光光线的空间直线方程;s4、采集图像瞄准点、激光瞄准点三维点坐标;s5、通过三维坐标,计算负载平台水平、垂直两轴的旋转角度;s6、传入负载平台旋转角度,完成发射装置的自动跟瞄。
5.具体地说,步骤s1具体如下:s11、通过坐标系的转换获得单目相机的集合模型,从而计算相机内参;s12、通过相机内参获得双目相机几何模型;双目几何模型还需要考虑外参数,即左右两个相机之间的旋转平移关系。
6.具体地说,步骤s11具体如下:s111、将世界坐标系刚体变换到相机坐标系中,所述世界坐标是三维空间中真实物件所在位置的参考坐标系,相机坐标系作为空间坐标系,以左相机光心作为世界坐标的坐标原点;相机坐标以其自身的光心作为坐标原点,其中z轴以相机光轴平行;转换具体如下:其中为旋转矩阵,为平移矩阵;s112、相机坐标系通过透射投影到图像坐标系中,所述图像坐标系是以相机拍摄的二维图像为基准建立的坐标系,用于表明被测物体在图像中的位置,包括连续图像坐标和或空间图像坐标;图像坐标的坐标系原点在相机光轴与成像平面的焦点上,单位为mm;用于表示物体从相机坐标系转到图像坐标系的透视投影关系,投影,透射投影计算如下:其中为相机内参;s113、图像坐标系通过离散化到像素坐标系中;所述像素坐标系是为离散图像坐标系,原点在图像的左上角,单位为像素;转换如下其中,代表x轴方向单位像素对应相机ccd上的实际宽度,代表y轴方向单位像素对应相机ccd上的实际宽度;像素坐标相当于是对x轴和y轴的离散化;上式的齐次坐标写成如下的矩阵形:
逆关系可写成:其中、、、为相机内参。
7.具体地说,外参数计算方法如下:假设世界坐标系与左相机坐标系重合,表示左相机坐标系,表示图像坐标系,表示左相机焦距;表示右相机坐标系,表示图像坐标系,表示右相机焦距;p为空间中任意一点,p点在左相机和右相机投影点分别为、:通过相机透视变换模型可以得到以下关系式:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)假设旋转矩阵,平移向量为,则有如下变换关系:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)由(1)、(2)、(3)可知,左右两个相机的像素点之间的对应关系如下:
因此,世界坐标系下的三维空间点可以表示为下式(4),实现相机公共视场任意点的世界坐标求取
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)。
8.具体地说,步骤s3具体为:s31、随机选取出可以估计出空间直线模型的最小样本点坐标,并初始化误差范围内的点即内点的个数,最佳内点的个数为n,模型阈值t、最佳迭代次数k;对于直线拟合情况,最小数据集即为2个点坐标;s32、使用最小数据集来计算出空间直线模型;s33、将所有数据代入空间直线模型,通过计算出点到直线的距离统计出内点的数目,及其坐标,此时坐标作为最佳内点坐标集合;s34、判断当前的迭代次数ck是否大于等于最佳迭代次数k,如果是,直接进入步骤s36,如果不是,进入步骤s35;s35、判断当前内点数cn是否大于初始化时的最佳内点数n,当是,将cn赋值给n作为最佳内点数n返回到步骤s31,当否,则进入步骤s32;s36、将最佳内点坐标集合带入最小二乘拟合算法,求解最佳空间直线方程。
9.具体地说,步骤s4具体为:在图像视觉系统内进行量测,采集激光瞄准点坐标p
view
;然后,基于步骤s3中最佳空间直线模型,通过代入当前目标点位深度值z,求取当前目标瞄准点p
view
深度下的激光瞄准点位p
laser
;此时,得到双目系统下的两个世界坐标系三维点p
view
、p
laser
,通过空间坐标的转换关系,计算空间两点之间的水平、垂直角度。
10.具体地说,步骤s5具体为:将激光瞄准点分两步旋转至目标瞄准点,将角度分为横向的δh和与之垂直方向的δv,瞄准点到p
view
和p
laser
之间的距离可以通过双目解算获取,设为深度z;则负载平台旋转角度可以分为以下两步进行计算:
。
11.本发明的有益效果在于:本技术能够降低对发射人员的要求,在恶劣场景仍能够准确快速的锁定目标点位,实现任务的高效、快速完成。
附图说明
12.图1和图2为本发明提出的一种自动高速弹道标定方法的结构图。
13.图3为本发明提出的一种自动高速弹道标定方法的单元模块连接图。
14.图4为激光瞄准器标定点采集示意图。
15.图5为标定点采集与检测过程图。
16.图6为三维标定点采集可视化图。
17.图7为ransac空间直线拟合流程图。
18.图8为ransac筛选后用于拟合直线的最佳内点图。
19.图9为目标点、瞄准点夹角计算示意图。
具体实施方式
20.如图1-3所示,一种自动高速弹道标定方法,包括以下步骤:s1、在负载平台固定传感器,进行双目相机解算,重建双目空间坐标系下的三维点坐标,建立相机几何模型;具体步骤如下:s11、通过坐标系的转换获得单目相机的集合模型,从而计算相机内参;s111、将世界坐标系刚体变换到相机坐标系中,所述世界坐标是三维空间中真实物件所在位置的参考坐标系,相机坐标系作为空间坐标系,为了方便计算,本技术以左相机光心作为世界坐标的坐标原点;相机坐标以其自身的光心作为坐标原点,其中z轴以相机光轴平行;转换具体如下:其中为旋转矩阵,为平移矩阵。
21.s112、相机坐标系通过透射投影到图像坐标系中,所述图像坐标系是以相机拍摄的二维图像为基准建立的坐标系,用于表明被测物体在图像中的
位置,包括连续图像坐标和或空间图像坐标。图像坐标的坐标系原点在相机光轴与成像平面的焦点上,单位为mm。用于表示物体从相机坐标系转到图像坐标系的透视投影关系,投影,透射投影计算如下:其中为相机内参。
22.s113、图像坐标系通过离散化到像素坐标系中。所述像素坐标系是为离散图像坐标系,原点在图像的左上角,单位为像素。转换如下其中,代表x轴方向单位像素对应相机ccd上的实际宽度,代表y轴方向单位像素对应相机ccd上的实际宽度(单个ccd或cmos传感器大小)。像素坐标相当于是对x轴和y轴的离散化。上式的齐次坐标写成如下的矩阵形:逆关系可写成:其中、、、为相机内参。
23.s12、通过相机内参获得双目相机几何模型;双目几何模型还需要考虑外参数,即左右两个相机之间的旋转平移关系,外参数计算方法如下:假设世界坐标系与左相机坐标系重合,表示左相机坐标系,表示图像坐标系,表示左相机焦距;表示右相机坐标系,表示图像坐标系,表示右相机焦距;p为空间中任意一点,p点在左相机和右相机投影点分别为、
,双目相机几何模型如图3所示:通过相机透视变换模型可以得到以下关系式:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)假设旋转矩阵,平移向量为,则有如下变换关系:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)由(1)、(2)、(3)可知,左右两个相机的像素点之间的对应关系如下:因此,世界坐标系下的三维空间点可以表示为下式(4),实现相机公共视场任意点的世界坐标求取
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)。
24.s2、固定激光瞄准器到负载平台,采集若干激光光线不同深度的三维点坐标;具体步骤如下:如图4所示,将激光瞄准器固定到负载平台,调整负载平台角度,使得发射激光光束位于标定人员可接触范围内,然后将激光发射的光斑成像在接收白板(或白色卡纸)上,
通过双目相机采集不同距离下激光光斑p1、p2...pn的三维点坐标;在本示例中,激光点数据采集、检测过程如图5所示(一对左、右影像为一组空间点,黑色位置为异常值),获取的激光标瞄准器标定点可视化如图6所示,三维空间内获取到的一系列点基本位于同一条空间直线中。
25.s3、基于ransac算法,拟合激光光线的空间直线方程;具体步骤如下:ransac算法将所有的样本数据集分为中正确数据(inliers,模型能够描述的样本数据),以及异常数据(outlies,偏离正常范围很远、不能符合数学模型的样本数据),假设数据集中部分样本存在较大噪声,这些异常数据可能是由于错误的测量、错误的假设、错误的计算等产生的。基于ransac算法,拟合激光光线的空间直线方程,通过反复选择数据集去估计出模型,一直迭代到估计出认为比较好的模型。具体的实现步骤如图7所示,分为以下几步:s31、随机选取出可以估计出空间直线模型的最小样本点坐标,并初始化误差范围内的点即内点的个数,最佳内点的个数为n,模型阈值t、最佳迭代次数k;对于直线拟合情况,最小数据集即为2个点坐标;s32、使用最小数据集来计算出空间直线模型;s33、将所有数据代入空间直线模型,通过计算出点到直线的距离统计出内点的数目,及其坐标,此时坐标作为最佳内点坐标集合;s34、判断当前的迭代次数ck是否大于等于最佳迭代次数k,如果是,直接进入步骤s36,如果不是,进入步骤s35;s35、判断当前内点数cn是否大于初始化时的最佳内点数n,当是,将cn赋值给n作为最佳内点数n返回到步骤s31,当否,则进入步骤s32;s36、将最佳内点坐标集合带入最小二乘拟合算法,求解最佳空间直线方程。
26.图8为ransac算法在采集空间点中筛选出的内点三维可视化效果。
27.s4、采集图像瞄准点、激光瞄准点三维点坐标;具体地说,在图像视觉系统内进行量测,采集激光瞄准点坐标p
view
。然后,基于步骤s3中最佳空间直线模型,通过代入当前目标点位深度值z,求取当前目标瞄准点p
view
深度下的激光瞄准点位p
laser
。此时,得到双目系统下的两个世界坐标系三维点p
view
、p
laser
,通过空间坐标的转换关系,计算空间两点之间的水平、垂直角度。
28.s5、通过三维坐标,计算负载平台水平、垂直两轴的旋转角度;设激光瞄准点p
view
、激光瞄准点p
laser
位于图9的图像内,现要将激光瞄准点分两步旋转至目标瞄准点(真实待瞄准位置),将角度分为横向的δh和与之垂直方向的δv,瞄准点到p
view
和p
laser
之间的距离可以通过双目解算获取(设为深度z),其计算原理示意图如图9所示。
29.则负载平台旋转角度可以分为以下两步进行计算:
。
30.s6、传入负载平台旋转角度,完成发射装置的自动跟瞄。
31.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。