技术特征:
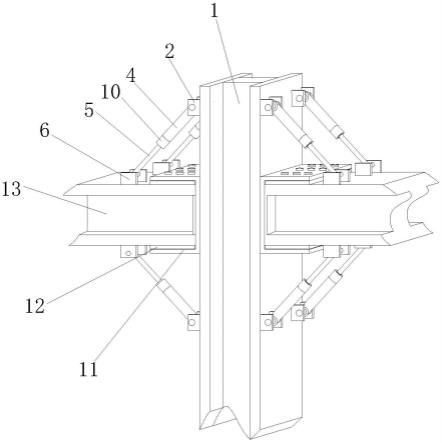
1.一种臂架控制方法,其特征在于,臂架末端设置有输料管(300),所述臂架控制方法包括:获取机手输入的机手控制指令和施工人员输入的施工控制指令,其中,所述机手控制指令包括牵引方向信息和升降信息,所述施工控制指令包括牵引角度信息;根据所述所述机手控制指令和所述施工控制指令得到臂架的驱动需求量;根据所述驱动需求量控制所述臂架带动所述输料管(300)运动至指定布料位置。2.根据权利要求1所述的臂架控制方法,其特征在于,所述获取机手输入的机手控制指令和施工人员输入的施工控制指令包括:获取施工人员输入的臂架牵引指令;在所述臂架牵引指令包含牵引开启信息的情况下,获取机手输入的机手控制指令和施工人员输入的施工控制指令。3.根据权利要求2所述的臂架控制方法,其特征在于,所述获取施工人员输入的臂架牵引指令包括:获取所述机手输入的模式指令;在所述模式指令包含牵引模式信息的情况下,获取施工人员输入的臂架牵引指令。4.一种臂架控制系统,其特征在于,臂架末端设置有输料管(300),所述臂架控制系统(200)包括:操作控制器(10),用于采集机手输入的机手控制指令,其中,所述机手控制指令包括牵引方向信息和升降信息;牵引装置(100),安装于所述输料管(300),并用于采集施工人员输入的施工控制指令,其中,所述施工控制指令包括牵引角度信息;驱动控制器(20),被配置为获取所述机手控制指令和所述施工控制指令,根据所述所述机手控制指令和所述施工控制指令得到臂架的驱动需求量,根据所述驱动需求量控制所述臂架带动所诉输料管(300)运动至指定布料位置。5.根据权利要求4所述的臂架控制系统,其特征在于,所述臂架控制系统(200)还包括施工控制器(30),所述施工控制器(30)用于采集施工人员输入的臂架牵引指令;所述驱动控制器(20)进一步被配置为,获取施工人员通过施工控制器(30)输入的臂架牵引指令,在所述臂架牵引指令包含牵引开启信息的情况下,获取机手通过操作控制器(10)输入的机手控制指令。6.根据权利要求5所述的臂架控制系统,其特征在于,所述操作控制器(10)还用于采集机手输入的模式指令,所述驱动控制器(20)进一步被配置为,获取所述模式指令,在所述模式指令包含牵引模式信息的情况下,获取施工人员通过施工控制器(30)输入的臂架牵引指令。7.根据权利要求4所述的臂架控制系统,其特征在于,所述牵引装置(100)包括:牵引盘(1),用于和所述臂架末端的输料管(300)连接;感应环(2),安装于所述牵引盘(1)并用于环设于所述输料管(300)外;牵引滑块(3),和所述牵引盘(1)连接并对应所述感应环(2)安装有感应头(31),所述牵引滑块(3)能相对所述牵引盘(1)运动,并带动所述感应头(31)绕所述感应环(2)公转,所述感应环(2)用于检测所述感应头(31)的牵引角度。
8.根据权利要求7所述的臂架控制系统,其特征在于,所述牵引盘(1)设置有和所述牵引滑块(3)滑动配合的环形轨道槽(11),所述环形轨道槽(11)和所述感应环(2)同轴设置。9.根据权利要求8所述的臂架控制系统,其特征在于,所述牵引盘(1)设置有供所述输料管(300)穿过的中空腔(12),所述中空腔(12)和所述输料管(300)的形状相匹配,所述中空腔(12)的腔壁用于和所述输料管(300)紧密面贴合,所述中空腔(12)、所述环形轨道槽(11)和所述感应环(2)由内向外依次嵌套且同轴设置。10.根据权利要求9所述的臂架控制系统,其特征在于,所述牵引盘(1)包括:安装筒(13),所述中空腔(12)开设于所述安装筒(13);限位轨道环(15),环设于所述安装筒(13)外,所述安装筒(13)和所述限位轨道环(15)之间支撑有支撑板(16),所述安装筒(13)、所述限位轨道环(15)和所述支撑板(16)围成所述环形轨道槽(11),所述限位轨道环(15)用于抵挡限位所述牵引滑块(3)。11.根据权利要求10所述的臂架控制系统,其特征在于,所述牵引滑块(3)包括:滑块主体(32),设置有供所述限位轨道环(15)伸入的防护腔(33),所述感应头(31)安装于所述防护腔(33)内;限位挡板(34),安装于所述滑块主体(32)并伸入所述环形轨道槽(11)内,所述限位轨道环(15)用于抵挡所述限位挡板(34),且所述限位挡板(34)外可转动套设有和所述限位轨道环(15)滚动接触配合的内滚轮(35)。12.根据权利要求11所述的臂架控制系统,其特征在于,所述牵引滑块(3)还包括位于所述防护腔(33)内的夹板(36),所述夹板(36)外可转动套设有外滚轮(37),所述限位轨道环(15)卡设于所述内滚轮(35)和所述外滚轮(37)之间。13.根据权利要求10所述的臂架控制系统,其特征在于,所述限位轨道环(15)的轴向端部均凸出于所述支撑板(16),使所述支撑板(16)的厚度方向两侧均形成所述环形轨道槽(11)。14.根据权利要求10所述的臂架控制系统,其特征在于,所述安装筒(13)的外表面设置有基准方向标记(14),所述安装筒(13)的轴向端部均凸出于所述限位轨道环(15),所述基准方向标记(14)靠近所述所述安装筒(13)的轴向端部设置。15.一种工程机械(400),其特征在于,所述工程机械(400)包括臂架和权利要求4至14中任意一项所述的臂架控制系统(200)。16.一种机器可读存储介质,其特征在于,所述机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至3中任意一项所述的臂架控制方法。
技术总结
本发明提供一种臂架控制方法、系统、工程机械和机器可读存储介质,臂架末端设置有输料管,所述臂架控制方法包括:获取机手输入的机手控制指令和施工人员输入的施工控制指令,其中,所述机手控制指令包括牵引方向信息和升降信息,所述施工控制指令包括牵引角度信息;根据所述所述机手控制指令和所述施工控制指令得到臂架的驱动需求量;根据所述驱动需求量控制所述臂架带动所述输料管运动至指定布料位置。本发明具体接受施工人员的牵引方向信息和升降信息,配合机手的牵引角度信息得出臂架的驱动需求量,能提高人机协同性,在消除安全隐患的同时,降低了臂架操控难度,提高了臂架操控精度。控精度。控精度。
技术研发人员:曾中炜 唐志杰 吴亮
受保护的技术使用者:中联重科股份有限公司
技术研发日:2022.08.29
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。