1.本发明涉及智能焊接装备技术领域,尤其是涉及一种智能装备离合装置。
背景技术:
2.目前机械焊接变位机应用中涉及到的中空回转,驱动单元不能与夹紧单元同步旋转的时候,会出现管线缠绕损坏,影响机器人焊接轨迹等,不满足现场实际使用条件。
3.以往传统工程机械焊接工装,遇到需要此类机构的应用时,多采用人工操作的方式,或者采用两次装夹的方式进行,通常这样的工程机械件尺寸大、重量大,采用原有工作方式的话,工作效率低人工劳动强度大,不满足现在自动化、省人化、智能化的焊接生产线发展需求。
技术实现要素:
4.针对现有技术不足,本发明所要解决的技术问题是提供一种智能装备离合装置,其可实现离合式传动满足旋转驱动夹紧功能。
5.为了解决上述技术问题,本发明所采用的技术方案为:
6.该智能装备离合装置,包括基座和夹具转盘,所述夹具转盘可旋转的设在基座上,夹具转盘上设有夹具结构,还包括用于驱动夹具结构开合的驱动马达、传动结构以及用于驱动马达和传动结构之间离合的离合结构,所述驱动马达安装在基座上,传动结构与夹具结构相连,传动结构安装在夹具转盘上。
7.进一步的:
8.所述驱动马达的上端设有下啮合齿,传动结构的下端设有用于可与下啮合齿相啮合的上啮合齿。
9.所述离合结构包括控制油缸和用于驱动下啮合齿上下运动的控制臂,所述控制臂的一端与控制油缸的活塞杆相连。
10.所述传动结构包括驱动轴和传动轴,驱动轴的一端和传动轴的一端通过斜齿啮合相连,上啮合齿设在驱动轴的另一端,传动轴的另一端与夹具结构相连。
11.所述驱动马达通过支架固定在基座上,控制油缸设在驱动马达的壳体一侧上。
12.所述驱动马达为液压驱动马达,下啮合齿套在液压驱动马达的转轴顶部上,下啮合齿套的内壁与转动顶部外缘之间通过键槽结构配合。
13.所述传动结构包括传动箱,传动箱固定在夹具转盘上,传动轴和驱动轴均通过轴承设在传动箱内。
14.所述控制臂的一端与控制油缸的活塞杆顶部铰接相连,控制臂的另一端与驱动马达的壳体顶部铰接相连,控制臂与下啮合齿外缘相连。
15.所述下啮合齿的外缘上设有凹槽,控制臂位于凹槽内。
16.本发明与现有技术相比,具有以下优点:
17.该智能装备离合装置结构设计合理,工件需要夹紧定位时上下啮合齿实现对接带
动多个夹具同步夹紧,夹紧后变位焊接时通过离合结构实现分离,其可实现离合式传动满足旋转驱动夹紧功能,解决了整体油管不能随变位结构一起旋转的问题。
附图说明
18.下面对本说明书各幅附图所表达的内容及图中的标记作简要说明:
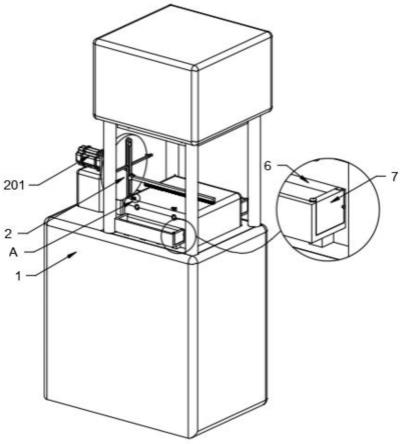
19.图1为本发明装置结构示意图一。
20.图2为本发明装置结构示意图二。
21.图3为本发明装置局部示意图一。
22.图4为本发明装置局部示意图二。
23.图中:
24.1.支撑臂、2.驱动结构、201.驱动马达、202.控制油缸、203.控制臂、204.下啮合齿、3.夹具传动箱、301.上啮合齿、302.驱动轴、303.传动轴、304.斜齿、4.夹具转盘、5.夹具结构。
具体实施方式
25.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明。
26.如图1至图4所示,该智能装备离合装置,包括基座、夹具转盘4、用于驱动夹具结构开合的驱动结构2、传动结构以及用于驱动马达和传动结构之间离合的离合结构;驱动结构为驱动马达201。
27.夹具转盘4可旋转的设在基座上,夹具转盘上设有夹具结构5,通过夹具结构的夹头开合对焊接工件进行定位;驱动马达安装在基座上,传动结构与夹具结构相连,传动结构安装在夹具转盘上。
28.优选的,驱动马达的上端设有下啮合齿204,传动结构的下端设有用于可与下啮合齿相啮合的上啮合齿301;离合结构包括控制油缸202和用于驱动下啮合齿上下运动的控制臂203,控制臂的一端与控制油缸的活塞杆相连;通过控制油缸驱动下啮合齿上下运动,从而实现与上啮合齿的啮合对接离合控制。
29.优选的,传动结构包括驱动轴302和传动轴303,驱动轴的一端和传动轴的一端通过斜齿304啮合相连,上啮合齿设在驱动轴的另一端,传动轴的另一端与夹具结构相连,上、下啮合齿啮合对接后,马达的动力可通过传动结构传至夹具结构,驱动夹具结构的夹头开合夹紧,夹具结构可采用现有结构。
30.驱动马达201通过支架固定在基座上,控制油缸设在驱动马达的壳体一侧上,集成设置,结构紧凑;驱动马达为液压驱动马达,下啮合齿套在液压驱动马达的转轴顶部上,下啮合齿套的内壁与转动顶部外缘之间通过键槽结构配合,结构简单,成本低。
31.进一步的,传动结构还包括夹具传动箱3,传动箱固定在夹具转盘上,传动轴303和驱动轴302均通过轴承设在传动箱内,结构紧凑。基座可为变位机的支撑臂1,位置调整幅度大。
32.优选的,控制臂203的一端与控制油缸的活塞杆顶部铰接相连,控制臂的另一端与驱动马达的壳体顶部铰接相连,控制臂与下啮合齿外缘相连;下啮合齿的外缘上设有凹槽,
控制臂位于凹槽内;通过控制臂可控制下啮合齿的上下运动,从而控制与上啮合齿的对接和分离,结构紧凑。进一步的,夹具转盘和基座之间设有位置传感器,位置传感器与驱动马达及控制油缸相连,保证上下啮合齿上下对位后实现对接驱动,工作稳定可靠。
33.本发明中工件需要夹紧定位时,通过控制油缸驱动控制臂,控制臂控制上下啮合齿实现对接带动多个夹具同步夹紧,夹紧后变位焊接时通过离合结构实现分离,其可实现离合式传动满足旋转驱动夹紧功能,解决了整体油管不能随变位结构一起旋转的问题。
34.上述仅为对本发明较佳的实施例说明,上述技术特征可以任意组合形成多个本发明的实施例方案。
35.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
技术特征:
1.一种智能装备离合装置,包括基座和夹具转盘,所述夹具转盘可旋转的设在基座上,夹具转盘上设有夹具结构,其特征在于:还包括用于驱动夹具结构开合的驱动马达、传动结构以及用于驱动马达和传动结构之间离合的离合结构,所述驱动马达安装在基座上,传动结构与夹具结构相连,传动结构安装在夹具转盘上。2.如权利要求1所述智能装备离合装置,其特征在于:所述驱动马达的上端设有下啮合齿,传动结构的下端设有用于可与下啮合齿相啮合的上啮合齿。3.如权利要求2所述智能装备离合装置,其特征在于:所述离合结构包括控制油缸和用于驱动下啮合齿上下运动的控制臂,所述控制臂的一端与控制油缸的活塞杆相连。4.如权利要求2所述智能装备离合装置,其特征在于:所述传动结构包括驱动轴和传动轴,驱动轴的一端和传动轴的一端通过斜齿啮合相连,上啮合齿设在驱动轴的另一端,传动轴的另一端与夹具结构相连。5.如权利要求3所述智能装备离合装置,其特征在于:所述驱动马达通过支架固定在基座上,控制油缸设在驱动马达的壳体一侧上。6.如权利要求3所述智能装备离合装置,其特征在于:所述驱动马达为液压驱动马达,下啮合齿套在液压驱动马达的转轴顶部上,下啮合齿套的内壁与转动顶部外缘之间通过键槽结构配合。7.如权利要求4所述智能装备离合装置,其特征在于:所述传动结构包括传动箱,传动箱固定在夹具转盘上,传动轴和驱动轴均通过轴承设在传动箱内。8.如权利要求6所述智能装备离合装置,其特征在于:所述控制臂的一端与控制油缸的活塞杆顶部铰接相连,控制臂的另一端与驱动马达的壳体顶部铰接相连,控制臂与下啮合齿外缘相连。9.如权利要求8所述智能装备离合装置,其特征在于:所述下啮合齿的外缘上设有凹槽,控制臂位于凹槽内。
技术总结
本发明公开了一种智能装备离合装置,包括基座和夹具转盘,所述夹具转盘可旋转的设在基座上,夹具转盘上设有夹具结构,还包括用于驱动夹具结构开合的驱动马达、传动结构以及用于驱动马达和传动结构之间离合的离合结构,所述驱动马达安装在基座上,传动结构与夹具结构相连,传动结构安装在夹具转盘上。该智能装备离合装置结构设计合理,工件需要夹紧定位时上下啮合齿实现对接带动多个夹具同步夹紧,夹紧后变位焊接时通过离合结构实现分离,其可实现离合式传动满足旋转驱动夹紧功能,解决了整体油管不能随变位结构一起旋转的问题。管不能随变位结构一起旋转的问题。管不能随变位结构一起旋转的问题。
技术研发人员:叶朝国 洪单 刘明三 吴守军 刘森
受保护的技术使用者:安徽瑞祥工业有限公司
技术研发日:2022.10.25
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。