1.本技术涉及机器人技术领域,尤其涉及一种仿生机器人。
背景技术:
2.国内外仿生物品种型机器人的发展,目前已取得丰富成果;如仿蟹形机器人,通过移动控制实现搬运、环境检测、水下救援等功能。
3.然而目前的仿生蟹机器人产品仅能做到形状近似或相同,其传动部分主要依靠履带或者轮子,腿足仅为摆设;通过履带或轮式前进时,只能在平路上行动,而面对爬坡等非平面环境时无法有效开展作业,导致机器人对环境的适应能力差。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本技术要解决的技术问题在于,针对现有技术的上述缺陷,提供一种仿生机器人,旨在提升环境适应能力。
6.本技术解决技术问题所采用的技术方案如下:
7.一种仿生机器人,其包括:
8.躯干;
9.四个对足机构,沿前后方向依次间隔设置于所述躯干上;每个对足机构均包括两个足机构,且所述两个足机构沿所述躯干的左右两侧对称分布;
10.控制装置,设置于所述躯干内,并分别与每个足机构连接,以控制任意三个对足机构以三角步态运动。
11.所述仿生机器人,其中,所述四个对足机构包括:
12.螯足对足机构,位于所述躯干的前侧;所述螯足对足机构包括两个螯足机构;
13.后步足对足机构,位于所述躯干的后侧;所述后步足对足机构包括两个后步足机构;
14.第一前步足对足机构,位于所述螯足对足机构与所述后步足对足机构之间;所述第一前步足对足机构包括两个第一前步足机构;
15.第二前步足对足机构,位于所述第一前步足对足机构与所述后步足对足机构之间;所述第二前步足对足机构包括两个第二前步足机构;位于所述躯干同一侧的第二前步足机构与第一前步足机构对称布置。
16.所述仿生机器人,其中,所述螯足机构包括:
17.第一传动装置,一端与所述躯干转动连接;
18.横向驱动装置,分别与所述躯干和所述第一传动装置连接,以驱动所述第一传动装置相对于所述躯干沿水平面转动;
19.夹持装置;
20.定位装置,一端与所述夹持装置连接;
21.第一纵向驱动装置,分别与所述定位装置远离所述夹持装置的一端、以及所述第一传动装置远离所述躯干的一端转动连接;所述第一纵向驱动装置可相对于所述第一传动装置沿竖直平面转动,以带动所述定位装置转动;
22.第一连杆,间隔布置于所述第一纵向驱动装置的下方;所述第一连杆的一端与所述第一传动装置转动连接,另一端与所述定位装置转动连接。
23.所述仿生机器人,其中,所述夹持装置包括:
24.夹持件,与所述定位装置远离所述第一传动装置的一端转动连接;
25.第一舵机,设置于所述定位装置上,并与所述夹持件连接;所述第一舵机用于驱动所述夹持件沿竖直平面转动,以靠近/远离所述定位装置。
26.所述仿生机器人,其中,所述第一前步足机构包括:
27.第一传动装置,一端与所述躯干转动连接;
28.横向驱动装置,分别与所述躯干和所述第一传动装置连接,以驱动所述第一传动装置相对于所述躯干沿水平面转动;
29.第一支撑装置,用于支撑地面;
30.第一纵向驱动装置,分别与所述第一支撑装置远离地面的一端、以及所述第一传动装置远离所述躯干的一端转动连接,所述第一纵向驱动装置可相对于所述第一传动装置沿竖直平面转动,以带动所述第一支撑装置转动;
31.第二连杆,间隔布置于所述纵向驱动装置的下方;所述第二连杆的一端与所述第一传动装置转动连接,另一端与所述第一支撑装置转动连接。
32.所述仿生机器人,其中,所述后步足机构包括:
33.第一传动装置,一端与所述躯干转动连接;
34.横向驱动装置,分别与所述躯干和所述第一传动装置连接,以驱动所述第一传动装置相对于所述躯干沿水平面转动;
35.第二支撑装置,用于支撑地面;
36.第二传动装置,一端与所述第一传动装置转动连接,另一端与所述第二支撑装置转动连接;
37.第二纵向驱动装置,设置于所述第二传动装置上;所述第二纵向驱动装置用于驱动所述第二传动装置相对于所述第一传动装置沿竖直平面转动,以及驱动所述第二支撑装置相对于所述第二传动装置沿竖直平面转动。
38.所述仿生机器人,其中,所述第二传动装置包括:
39.支架;
40.所述支架的长度方向的两端分别与所述第一传动装置和所述第二支撑装置转动连接;所述支架上设置有第一容纳位和第二容纳位;所述第一容纳位与所述第二容纳位沿所述支架的长度方向依次间隔排布。
41.所述仿生机器人,其中,所述第二纵向驱动装置包括:
42.第三舵机,设置于所述第一容纳位内;所述第三舵机的驱动轴与所述第一传动装置固定连接,以驱动所述支架相对于所述第一传动装置转动;
43.第四舵机,设置于所述第二容纳位内;所述第四舵机的驱动轴与所述第二支撑装置连接,以驱动所述第二支撑装置相对于所述支架沿竖直平面转动。
44.所述仿生机器人,其中,所述第一纵向驱动装置包括:
45.传动架,所述传动架上设置有舵机容纳位;
46.第二舵机,设置于所述舵机容纳位内;所述第二舵机的驱动轴与所述第一传动装置固定连接,以驱动所述传动架相对于所述第一传动装置沿竖直平面转动。
47.所述仿生机器人,其中,所述第一传动装置包括:
48.第一u型件;
49.第二u型件,与所述第一u型件垂直连接,且所述第二u型件与所述第一u型件开口方向相反;
50.所述横向驱动装置部分位于所述第一u型件的开口内,并与所述第一u型件连接。
51.有益效果:本技术中由于对足机构可以以三角步态进行运动,使得所述仿生机器人可以进行爬坡等越障行为,大大的提升了所述仿生机器人的越障能力,从而提升了所述仿生机器人对环境的适应能力。
附图说明
52.图1是本技术中所述仿生机器人的第一视图;
53.图2是本技术中所述仿生机器人的第二视图;
54.图3是本技术中所述仿生机器人的第三视图;
55.图4是本技术中所述传动架的结构示意图;
56.图5是本技术中所述第二传动装置的结构示意图;
57.图6是本技术中所述仿生机器人的功能原理框图。
具体实施方式
58.为使本技术的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本技术进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
59.请同时参阅图1-图6。本技术提供一种仿生机器人,所述仿生机器人包括躯干100、四个对足机构和控制装置;四个对足机构均设置于所述躯干100上,并沿前后方向依次间隔布置。每个对足机构均包括两个足机构,所述两个足机构相互对称,并沿所述躯干100的左右两侧分布,使得所述躯干100的左侧和右侧均分布有四个足机构,形成八足仿生机器人。
60.所述控制装置设置于所述躯干100内,每个足机构均与所述控住装置连接,以在所述控制装置的控制下运动。具体的,所述控制装置用于控制四个对足机构中的任意三个对足机构以三角步态运动。
61.本技术中由于对足机构可以以三角步态进行运动,使得所述仿生机器人可以进行爬坡等越障行为,大大的提升了所述仿生机器人的越障能力,从而提升了所述仿生机器人对环境的适应能力,适合担当野外侦查、水下搜寻以及太空探测等对自主性可靠性要求比较高的工作。另外,由于四个对足机构中任意三个对足机构均可以以三角步态运动,使得所述仿生机器人有冗余肢体,可以在某个足机构肢体丧失功能的情况下,使用其他足机构进行替换,继续执行一定的工作。
62.所述四个对足机构包括:螯足对足机构、后步足对足机构、第一前步足对足机构和
第二前步足对足机构。如图1所示,所述螯足对足机构位于所述躯干100的前侧;所述螯足对足机构包括对称的两个螯足机构(1和2)。两个螯足机构分别位于所述躯干100的左右两侧。所述后步足对足机构位于所述躯干100的后侧;所述后步足对足机构包括对称的两个后步足机构(7和8),两个后步足机构分别位于所述躯干100的左右两侧。所述第一前步足对足机构位于所述螯足对足机构与所述后步足对足机构之间;所述第一前步足对足机构包括对称的两个第一前步足机构(3和4),两个第一前步足机构分别位于所述躯干100的左右两侧。所述第二前步足对足机构位于所述第一前步足对足机构与所述后步足对足机构之间;所述第二前步足对足机构包括对称的两个第二前步足机构(5和6),两个前步足机构分别位于所述躯干100的左右两侧。即,所述躯干100的左右两侧均从前向后依次布置有:螯足机构、第一前步足机构、第二前步足机构和后步足机构。
63.位于所述躯干100同一侧的第二前步足机构与第一前步足机构对称布置,即第二前步足机构与第一前步足机构的结构相同,且位于所述躯干100同一侧的第二前步足机构与第一前步足机构相互对称。
64.需要说明的是,本技术中所述对称是指当两个足机构相对于所述躯干100的倾斜角度相同时,两个足机构结构相同,且完全对称;当两个足机构相对于所述躯干100的倾斜角度不同时,两个足机构结构相同,且与所述躯干100的连接点位置对称,而无法完全对称。本技术中一实施例,如图所示,所述仿生机器人初始时,两个螯足机构完全对称,两个第一前步足机构完全对称,两个第二前步足机构完全对称,两个后步足机构完全对称;位于所述躯干100同一侧的第二前步足机构与第一前步足机构结构相同,且与所述躯干100的连接点位置对称,而无法完全对称。
65.本技术四个对足机构的足长各不相同,足的数量和比例都与仿生对象相近,能更好地对仿生对象进行模仿;各对足的长度不同,可以做出更贴合仿生对象椰子蟹的形态和运动。
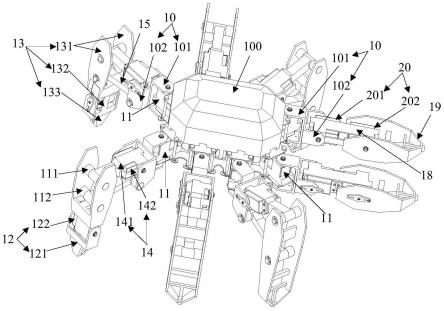
66.如图2所示,所述螯足机构包括:第一传动装置10、横向驱动装置11、夹持装置12、定位装置13、第一纵向驱动装置14和第一连杆15。所述第一传动装置10与所述躯干100转动连接,并可相对于所述躯干100沿水平面转动;所述横向驱动装置11分别与所述躯干100和所述第一传动装置10连接,以驱动所述第一传动装置10相对于所述躯干100沿水平面转动。
67.所述夹持装置12用于夹取和释放物品,还用于支撑地面;所述定位装置13的一端与所述夹持装置12连接;所述第一纵向驱动装置14的两端分别与所述定位装置13远离所述夹持装置12的一端、以及所述第一传动装置10远离所述躯干100的一端转动连接;所述第一纵向驱动装置14可相对于所述第一传动装置10沿竖直平面转动,以带动所述定位装置13沿竖直平面转动,从而通过所述定位装置13带动所述夹持装置12抬升并脱离地面或下降并支撑地面。
68.所述横向驱动装置11用于驱动所述第一传动装置10相对于所述躯干100沿水平面转动,从而传动作用,实现所述夹持装置12和所述定位装置13相对于所述躯干100沿水平面转动;所述第一纵向驱动装置14用于通过所述定位装置13带动所述夹持装置12抬升并脱离地面或下降并支撑地面;因此,通过所述横向驱动装置11和所述第一纵向驱动装置14可以分别实现所述定位装置13和所述夹持装置12抬升并脱离地面、下降并支撑地面、以及相对于所述躯干100沿水平面的转动。
69.所述第一连杆15布置于所述第一纵向驱动装置14的下方,并与所述第一纵向驱动装置14间隔布置;所述第一连杆15的一端与所述第一传动装置10转动连接,另一端与所述定位装置13转动连接,使得无论所述定位装置13进行沿水平面转动的动作,还是抬升/下降的动作,所述定位装置13与所述第一纵向驱动装置14之间的夹角固定,所述定位柱装置与所述第一纵向驱动装置14之间无法相对转动,从而减少所述螯足机构的一个自由度,增加所述螯足机构的稳定性的同时降低控制难度,还能保持相似度,也后续扩展其他功能留下余地。
70.所述夹持装置12包括夹持件121和第一舵机122;所述夹持件121与所述定位装置13远离所述第一传动装置10的一端转动连接,所述第一舵机122设置于所述定位装置13上,并与所述夹持件121连接;所述第一舵机122用于驱动所述夹持件121沿竖直平面转动,以靠近/远离所述定位装置13。所述夹持件121的转动平面与所述定位装置13相对于所述第一传动装置10的转动平面相平行,且所述夹持件121的末端与所述定位装置13的末端相齐平,从而通过所述夹持件121与所述定位装置13的末端配合以夹取或释放物品。
71.当所述仿生机器人未夹取物品,仅沿地面行走时,所述夹持件121与所述定位装置13的末端相贴合,且当所述螯足机构支撑地面时,所述定位装置13的末端和所述夹持件121均接触并支撑地面。
72.所述第一纵向驱动装置14包括传动架141和第二舵机142;所述传动架141的一端与所述定位装置13转动连接,另一端与所述第一传动装置10转动连接;如图4所示,所述传动架141上设置有舵机容纳位140,所述第二舵机142设置于所述舵机容纳位140内。所述第二舵机142的驱动轴与所述第一传动装置10固定连接;当所述第二舵机142启动时,因所述第一传动装置10无法进行竖直平面的转动,而所述第二舵机142的驱动轴与所述第一传动装置10固定连接,因此所述第二舵机142可以驱动所述传动架141相对于所述第一传动装置10沿竖直平面转动,从而带动所述定位装置13和所述夹持装置12沿竖直平面转动。
73.所述定位装置13的末端、所述夹持件121的末端均呈下窄上宽的锥形,更有利于所述夹持件121与所述定位装置13配合以夹取物品;同时减小支撑地面时与地面之间的接触面积,以提升所述仿生机器人的野外爬行能力。
74.所述定位装置13包括从上到下依次布置的两个螯足定位板131、容纳壳132、以及延伸部133;两个螯足定位板131对称且沿所述躯干100的周向依次间隔布置;所述容纳壳132用于收容所述第一舵机122;所述容纳壳132将两个螯足定位板131固定连接;所述延伸部133与所述夹持件121配合夹取或释放物品,且所述延伸部133与所述夹持件121之间的排列方向垂直于两个螯足定位板131之间的排列方向。所述延伸部133的末端呈下窄上宽的锥形。
75.两个螯足定位板131之间还从上到下依次布置有第一螯足连接轴111和第二螯足连接轴112,所述第一螯足连接轴111的两端分别与两个螯足定位板131连接,且所述第一纵向驱动装置14的传动架141与所述第一螯足连接轴111转动连接。所述第二螯足连接轴112的两端分别与两个螯足定位板131连接,且所述第一连杆15与所述第二螯足连接轴112转动连接。所述延伸部133的下端朝所述夹持件121方向弯折布置,所述夹持件121的下端朝所述延伸部133方向弯折布置,使得所述夹持件121与所述延伸部133以类似椰子蟹的蟹螯的方式的配合夹取物品,提升所述仿生机器人夹取物品的效率。
76.由于所述第二前步足机构与所述第一前步足机构结构相同,因此本技术仅对所述第一前步足机构的具体结构进行描述,第二前步足机构的具体结构不再赘述。如图3所示,所述第一前步足机构包括第一传动装置10、横向驱动装置11、第一支撑装置16、第一纵向驱动装置14和第二连杆17。
77.所述第一传动装置10的一端与所述躯干100转动连接;所述横向驱动装置11分别与所述躯干100和所述第一传动装置10连接,以驱动所述第一传动装置10相对于所述躯干100沿水平面转动;所述第一支撑装置16用于支撑地面;所述第一纵向驱动装置14分别与所述第一支撑装置16远离地面的一端、以及所述第一传动装置10远离所述躯干100的一端转动连接,所述第一纵向驱动装置14可相对于所述第一传动装置10沿竖直平面转动,以带动所述第一支撑装置16转动。
78.所述横向驱动装置11驱动所述第一传动装置10转动,从而带动所述第一支撑装置16沿水平面转动;所述第一纵向驱动装置14驱动所述第一支撑装置16沿竖直平面转动,从而实现所述第一支撑装置16沿水平面和沿竖直平面的转动,并与其它足机构进行配合,以三角步态进行运动。
79.所述第二连杆17间隔布置于所述第一纵向驱动装置14的下方;所述第二连杆17的一端与所述第一传动装置10转动连接,另一端与所述第一支撑装置16转动连接,使得无论所述第一支撑装置16进行沿水平面转动的动作,还是抬升/下降的动作,所述第一支撑装置16与所述第一纵向驱动装置14之间的夹角固定,所述第一支撑装置16与所述第一纵向驱动装置14之间无法相对转动,从而减少所述第一前步足机构的一个自由度,增加所述第一前步足机构的稳定性的同时降低控制难度,还能保持相似度,也后续扩展其他功能留下余地。
80.所述第一支撑装置16包括两个前步足支撑板161、至少一个前步足固定板162、以及v型前步足支撑件163;两个前步足支撑板161对称且间隔布置;所述前步足固定板162位于两个前步足支撑板161之间,并分别与两个前步足支撑板161固定连接。所述v型前步足支撑件163的开口朝向两个前步足支撑板161;所述v型前步足支撑件163位于两个前步足支撑板161的末端,并分别与两个前步足支撑板161连接;且所述前步足支撑板161的宽度向上向下依次减小,使得所述第一前步足机构的外观形状近似椰子蟹的前步足,提升所述仿生机器人的爬行能力和环境适应能力。
81.两个前步足支撑板161之间设置有第一前步足连接轴113和第二前步足连接轴114;所述第一前步足连接轴113位于所述第二前步足连接轴114的上方。所述第一纵向驱动装置14的传动架141与所述第一前步足连接轴113转动连接;所述第二连杆17与所述第二前步足连接轴114转动连接。
82.如图2所示,所述后步足机构包括第一传动装置10、横向驱动装置11、第二支撑装置19、第二传动装置和第二纵向驱动装置20。所述第一传动装置10的一端与所述躯干100转动连接;所述横向驱动装置11分别与所述躯干100和所述第一传动装置10连接,以驱动所述第一传动装置10相对于所述躯干100沿水平面转动;所述第二支撑装置19用于支撑地面;所述第二传动装置的一端与所述第一传动装置10转动连接,另一端与所述第二支撑装置19转动连接。
83.所述第二纵向驱动装置20设置于所述第二传动装置上;所述第二纵向驱动装置20用于驱动所述第二传动装置相对于所述第一传动装置10沿竖直平面转动,以及驱动所述第
二支撑装置19相对于所述第二传动装置沿竖直平面转动。
84.由于所述第二纵向驱动装置20可以驱动所述第二支撑装置19相对于所述第二传动装置沿竖直平面转动,因此,所述第二支撑装置19相比于所述第一支撑装置16增加了一个自由度,使得所述仿生机器人在不需要运动时,将所述第二支撑装置19折叠起来,更加符合椰子蟹的日常行为习惯。
85.所述后步足机构可以调节至以下几种状态:所述第一传动装置10、所述第二传动装置、以及所述第二支撑装置19均水平布置的状态;所述第二传动装置相对于所述第一传动装置10倾斜、所述第二支撑装置19相对于所述第二传动装置倾斜、且所述第二支撑装置19未支撑地面的状态;以及所述第二传动装置相对于所述第一传动装置10倾斜、所述第二支撑装置19相对于所述第二传动装置倾斜、且所述第二支撑装置19支撑地面的状态。
86.所述第二传动装置包括支架18;所述支架18的长度方向的两端分别与所述第一传动装置10和所述第二支撑装置19转动连接;如图5所示,所述支架18上设置有第一容纳位181和第二容纳位182;所述第一容纳位181与所述第二容纳位182沿所述支架18的长度方向依次间隔排布。
87.所述第二纵向驱动装置20包括第三舵机201和第四舵机202;所述第三舵机201设置于所述第一容纳位181内;所述第三舵机201的驱动轴与所述第一传动装置10固定连接,以通过所述第三舵机201相对于所述第一传动装置10的转动,来驱动所述支架18转动,从而实现所述第二传动装置和所述第二支撑装置19整体相对于所述第一传动装置10转动。所述第四舵机202设置于所述第二容纳位182内;所述第四舵机202的驱动轴与所述第二支撑装置19连接,以驱动所述第二支撑装置19相对于所述支架18沿竖直平面转动,从而调整所述第二支撑装置19与所述支架18之间的相对角度,使得所述第二支撑装置19支撑地面或脱离地面。
88.所述第二支撑装置19与所述第一支撑装置16结构相同,区别仅在于外观尺寸不同:所述第二支撑装置19的外观体积小于所述第一支撑装置16的外观体积。
89.基于以上任意一项所述第一传动装置10,所述第一传动装置10包括第一u型件101和第二u型件102;所述第二u型件102与所述第一u型件101垂直连接,且所述第二u型件102与所述第一u型件101开口方向相反。所述横向驱动装置11部分位于所述第一u型件101的开口内,并与所述第一u型件101连接,以驱动所述第一u型件101沿水平面转动,从而带动所述第二u型件102沿水平面转动。
90.对于所述螯足机构、所述第一前步足机构和所述第二前步足机构,所述第一纵向驱动装置14均部分位于所述第二u型件102的开口内。具体的,所述传动架141的一部分位于所述第二u型件102的开口内,并与所述第二u型件102转动连接;所述第二舵机142的驱动轴与所述第二u型件102固定连接。
91.基于以上任意一项所述横向驱动装置11,所述横向驱动装置11包括第四舵机202,所述第四舵机202的驱动轴位于所述第一u型件101的开口内,并与所述第一u型件101连接。
92.如图6所示,所述控制装置包括控制电路板30、电源40和红外传感器50。所述电源40、所述红外传感器50、所述第一舵机122、所述第二舵机142、所述第三舵机201和所述第四舵机202均与所述控制电路板30电连接。所述红外传感器50用于与外部智能控制手柄之间进行红外信号传送;用户操作外部智能控制手柄发送红外信号,所述控制电路板30接收红
外信号,并在接受到相对于的信号时运行对应的动作。
93.本技术中一实施例,如图1所示,当所述仿生机器人以所述螯足对足机构(1和2)、所述第一前步足对足机构(3和4)和所述第二前步足对足机构(5和6)配合进行三角步态运动时,其运动过程如下:
94.前进步态
95.以1、4、5足作为支撑,2、3、6足抬起并向前转动,与此同时1、4、5足向后转动,所述仿生机器人整体往前移动;2、3、6足在旋转行程过半后开始放下,完全放下后,1、4、5足位于后方,2、3、6位于前方,至此,完成一步动作;再以2,3,6足作为支撑,1、4、5足抬起放下,镜像重复之前的动作,以此循环完成前进动作。
96.后退步态
97.后退动作的步态为前进动作步态的反向设计,原理相同。
98.右转步态
99.以1、4、5足作为支撑,2、3、6足抬起并右转,1、4、5足左转,所述仿生机器人整体右转,然后放下2、3、6足;以2、3、6足作为支撑,1、4、5足抬起并右转,2、3、6足左转,所述仿生机器人整体再次右转,然后1、4、5足放下,并以此为循环完成右转。
100.左转步态
101.左转动作的步态为右转动作的步态的镜像设计,原理相同。
102.综上所述,本技术提供一种仿生机器人,其包括:躯干;四个对足机构,沿前后方向依次间隔设置于所述躯干上;每个对足机构均包括两个足机构,且所述两个足机构沿所述躯干的左右两侧对称分布;控制装置,设置于所述躯干内,并分别与每个足机构连接,以控制任意三个对足机构以三角步态运动,使得所述仿生机器人可以进行爬坡等越障行为,大大的提升了所述仿生机器人的越障能力,从而提升了所述仿生机器人对环境的适应能力。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。