技术特征:
1.一种基于处方图的变量施肥方法,其应用于施肥机,所述施肥机具有直线等距排列的多个施肥单体,各所述施肥单体均通过导肥管连接落肥口;所述施肥机上安装有位置探测元件;所述方法包括:获取处方图数据;根据所述位置探测元件获取的位置信息(x,y)与航向角θ计算各排肥口的位置数据;根据所述位置数据在所述处方图数据中查询对应于各所述排肥口的目标排肥量;根据所述目标排肥量控制对应于所述排肥口的施肥单体运转;其特征在于,在俯视方向上,所述位置探测元件安装在第一行落肥口与最后一行落肥口连线的中点位置;所述根据所述位置探测元件获取的位置信息(x,y)与航向角θ实时计算各排肥口的位置数据包括:根据算式以及算式分别计算第一行落肥口及最后一行落肥口的坐标位置;其中,n为总行数;(x
r1
,y
r1
)为第一行落肥口的位置坐标;(x
rn
,y
rn
)为最后一行落肥口的位置坐标;d为相邻两个所述落肥口之间的间距;根据算式计算中间各所述落肥口的位置;其中,(x
ri
,y
ri
)为第i行落肥口的位置坐标,i=2,3,
…
n-1。2.根据权利要求1所述的基于处方图的变量施肥方法,其特征在于,所述获取处方图数据之前还包括:获取上一次施肥作业的作业数据,所述作业数据包括处方图与施肥策略数据;基于所述作业数据,根据肥效消耗模型与消耗进程参数分布图,计算田地中各位置的剩余肥效;其中,消耗进程参数分布图描述了作业田地中不同区域内肥效的消耗进程参数;基于剩余肥效与新的施肥策略数据,生成新的处方图。3.根据权利要求1所述的基于处方图的变量施肥方法,其特征在于,所述计算田地中各位置的剩余肥效包括:根据上一次施肥作业的所述作业数据计算,根据肥效消耗模型与消耗进程参数分布图计算得到第一剩余肥效;根据上一次施肥作业前的基础肥效,基于均匀消耗模型计算得到第二剩余肥效;综合所述第一剩余肥效与所述第二剩余肥效,得到所述剩余肥效。4.根据权利要求2所述的基于处方图的变量施肥方法,其特征在于,每个施肥单体均具有多个施肥单元,各施肥单元排出的肥料不一致,且每个施肥单元均由一个施肥电机独立控制;所述施肥策略数据包括土壤所需元素数据,所述基于剩余肥效与新的施肥策略数据,生成新的处方图包括:
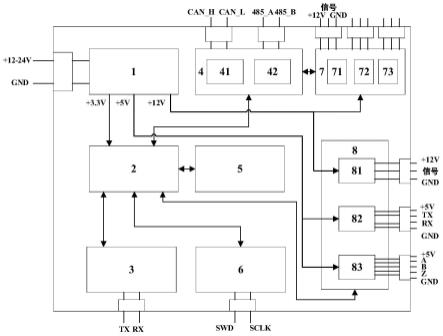
根据所述施肥策略数据与当前区域土壤的剩余肥效,计算当前区域土壤的需求信息,所述需求信息包括需补充的元素信息以及元素的需求量;根据所述需求信息计算当前区域土壤的处方数据,所述处方数据包括需施用的肥料种类以及各种肥料的需使用量;基于此,所述根据所述目标排肥量控制对应于所述排肥口的施肥单体运转包括:根据所述处方数据及施肥机的运行速度计算所需的肥料对应的所述施肥电机的目标转速;根据所述目标转速控制各所述施肥电机运转。5.根据权利要求1所述的基于处方图的变量施肥方法,其特征在于,所述方法还包括:获取所述堵缺肥传感器的采集数据;根据所述采集数据判断是否发生导肥管堵塞或肥箱缺肥,是则发出警报信息。6.根据权利要求1所述的基于处方图的变量施肥方法,其特征在于,所述位置探测元件获取的位置数据为wgs-84地理坐标系下的经纬度坐标,所述位置信息(x,y)是通过高斯-克吕格投影将位置数据转换为平面坐标系而得到。7.一种施肥控制器,其用于实施权利要求1-5任一项所述的基于处方图的变量施肥方法,其包括电源电路(1)、芯片基本电路(2)、上位机通讯电路(3)、施肥电机驱动器总线通讯电路(4)、处方图存储电路(5)、程序调试电路(6)、堵缺肥传感器信号接收与处理电路(7)、位置速度信号接收与处理电路(8);芯片基本电路(2)分别和上位机通讯电路(3)、施肥电机驱动器总线通讯电路(4)、处方图存储电路(5)、程序调试电路(6)、位置速度信号接收与处理电路(8)相连。8.根据权利要求7所述的施肥控制器,其特征在于,所述电源电路(1)支持12v-24v宽电压输入,且能够提供3.3v、5v、12v的电压输出;3.3v电压输出连接所述芯片基本电路(2),为控制器芯片提供电源;5v电压输出分别连接所述位置速度信号接收与处理电路(8)的gps信号接收电路(82)和转速编码器电路(83),为gps接收器和转速编码器提供电源;12v电压输出连接到所述位置速度信号接收与处理电路(8)的测速雷达信号解析电路(81)和所述堵肥缺肥传感器信号接收电路(7),为测速雷达和堵缺肥传感器提供电源。9.根据权利要求7所述的施肥控制器,其特征在于,所述施肥电机驱动器总线通讯电路(4)包括can总线通讯电路(41)、485总线通讯电路(42);其中所述can总线通讯电路(41)连接所述芯片基本电路(2)、各施肥电机驱动器以及所述堵肥缺肥传感器信号接收电路(7)上的对应引脚;所述485总线通讯电路(42)连接所述芯片基本电路(2)、各个所述施肥电机驱动器以及所述堵肥缺肥传感器信号接收电路上的对应引脚。
技术总结
本发明公开了一种基于处方图的变量施肥方法与施肥控制器,其中方法应用于施肥机,施肥机中所述位置探测元件安装在第一行落肥口与最后一行落肥口连线的中点位置;并据此推算出统一的落肥口算式,位置探测元件获取的位置信息与落肥口位置换算关系简单,且不会因机具转弯等因素影响计算准确性;此外,能够根据肥效消耗模型、消耗进程参数分布图与上一次施肥作业的作业数据计算出新的处方图,如此,不需要每次施肥之前均通过传感器重新测一遍田地各位置的肥效数据;另外能够根据土壤中所缺的元素,根据处方图动态对多种肥料进行配比施肥,满足土壤的多元素动态需求;最后能够对排肥情况进行实时监控,防止因堵缺肥引起的大范围漏投。围漏投。围漏投。
技术研发人员:丁友强 张文毅 祁兵 王云霞 扈凯 纪要 刘宏俊 胡敏娟 李坤 夏倩倩
受保护的技术使用者:农业农村部南京农业机械化研究所
技术研发日:2022.10.24
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。