1.本发明属于阵列信号处理领域,具体涉及一种冲击噪声下互质阵列的幅相误差自校正和测向方法。
背景技术:
2.波达方向估计是阵列信号处理领域的一项研究重点,可以广泛应用于战场通信,地质勘探等领域中,随着现代民用和军用通信的电磁环境越来越复杂,对波达方向估计的技术要求也越来越高。传统均匀线阵中,只能精确估计出小于阵元个数的信号数量,针对这个缺陷,学者提出一种特殊阵列,即互质阵列,该阵列可以有效地增大阵列孔径从而估计出大于阵元个数的信号波达角。然而在实际应用中,阵列可能并不处于理想状态,会存在阵列位置误差,阵列幅相误差,阵列互耦误差等,其中最常见的阵列幅相误差会严重影响拨达方向估计精度,甚至使波达方向估计算法失效。另外,实际通信场景中其噪声背景往往是有冲击性的,同样会造成经典波达方向估计算法性能下降甚至失效的问题。因此,研究冲击噪声下对互质阵列幅相误差校正方法和测向方法具有重要意义和价值。
3.最经典的幅相误差校正方法是辅助源校正法,该方法可以推广至互质阵列幅相误差校正上,并且能达到较高的精确度,然而辅助源校正法要求辅助源角度精确已知,实时性较差,不适用于实际通信场景中。由weiss和friedlande提出的经典幅相误差自校正方法即wf算法,常用于均匀阵列幅相误差校正,然而该算法需要进行大量迭代,且仅在幅相误差较小时能取到精确结果,互质阵列校正中,由于会采取空间平滑算法,故wf自校正算法在幅相误差较大时性能下降更大,甚至会失效。
4.根据查阅已有文献发现,孙兵等在《系统工程与电子技术》(2020,issn 1001-506x,cn 11-2422/tn)上发表的“幅度相位误差条件下的互质阵列doa估计方法”中,需要设置额外已精确校正过的互质阵元,提高了实际应用中的实现难度。彭文灿等在《计算机仿真》(2019,1006-9348(2019)04-0205-04)上发表的“基于iwo-pso的阵列幅相误差校正方法”中,需要外加辅助信源进行校正,其实时性较差,且只讨论了均匀阵列、高斯噪声的情况,因此本发明提出一种在极低信噪比的冲击环境下有良好性能的幅相误差校正及测向方法,将相位误差、幅度误差独立进行估计,提高估计准确度,采用无穷范数加权结合分数低阶协方差抑制冲击噪声的影响,并采用精英学习机制的量子麻雀搜索机制,允许在存在较大误差时进行幅相误差估计。
技术实现要素:
5.本发明的目的在于提供一种冲击噪声下互质阵列的幅相误差自校正和测向方法。
6.本发明的目的通过如下技术方案来实现:
7.一种冲击噪声下互质阵列的幅相误差自校正和测向方法,包括以下步骤:
8.步骤1:建立冲击噪声下,存在幅相误差时互质阵列接收信号的数学模型;计算接收信号的无穷范数归一化分数低阶相关矩阵;
9.构建a和b两个均匀阵列组合在一起,组成的互质阵列共由个阵元组成;阵列k次快拍后,阵元接收的信号数据矩阵为x=[x(1),...,x(k)],列向量其中,阵列a含有个阵元,阵列b含有个阵元,(
·
)
t
代表矩阵求转置的操作,k∈[1,k];数据矢量h=[h1,h2,..,hk],其中则无穷范数归一化后的阵列接收信号矩阵可记为x
′
=[x
′
(1),...,x
′
(k)]=[x(1)/h1,...,x(k)/hk];
[0010]
步骤2:根据无穷范数归一化分数低阶相关矩阵计算出互质阵元的幅度误差;
[0011]
步骤3:初始化精英量子麻雀搜索机制种群,并构造波达方向估计的目标函数和适应度函数;
[0012]
初始化精英量子麻雀搜索机制种群,种群中量子麻雀的个体数目为na,最大迭代次数为ta,迭代次数标号为t,且t∈[1,ta];第t次迭代时,第只量子麻雀的量子位置记为且q是搜索空间维数,此处与信源个数相等,t=1时,量子麻雀量子位置的每一维元素都随机初始化为[0,1]之间的均匀随机数;
[0013]
第t次迭代第个量子麻雀位置可以表示为其中,和分别为自校正算法循环至第i次时,量子麻雀的搜索边界的位置下限和位置上限,且i=1时初始量子麻雀第q维的位置下限和上限分别为i>1时,量子麻雀第q维搜索边界的上下限更新公式为其中,c1、c2和c3是自选参数,是第i次循环自校正前估计的第q个未知信号源的来波方向角;可生成第只量子麻雀估计出的导向矢量为其中对均有是第个参与计算的虚拟均匀阵元位置,则极大似然方程可以写为第t次迭代时,第只量子麻雀位置的适应度值计算公式为
[0014]
步骤4:执行精英学习量子麻雀搜索机制进行波达方向估计;
[0015]
步骤5:,检测迭代次数t是否等于最大迭代次数ta;
[0016]
步骤6:进行相位误差估计和校正;
[0017]
步骤7:判断自校正循环次数是否达到设定值。
[0018]
本发明还可以包括:
[0019]
1、步骤2中幅相误差自校正循环至第i次时估计的幅度误差矢量为估计的相位误差矢量记为估计的幅相误差对角矩阵为自校正的最大循环次数为i,当i<i时,用第i次循环估计的幅相误差对角阵对分数低阶协方差矩阵进行幅相误差补偿,并记补
偿后的分数低阶相关矩阵为其中(
·
)-1
是矩阵求逆操作,(
·
)h是矩阵求共轭转置操作;
[0020]
当i=1时,是单位阵;进行校正后,第m个阵元幅度误差值更新公式为其中,sqrt(
·
)是求均方根的操作,γn是冲击噪声的分散系数。
[0021]
1、步骤4中定义变量用于存储第i次循环直到第t次迭代为止的最佳量子麻雀对应的量子位置,记为同时,定义变量和分别记录本次迭代时最优适应度值、次优适应度值和次次优适应度值,对应量子位置分别为和
[0022]
2、定义随优化算法迭代次数t上升而非线性上升的变量定义精英引导矢量其中加权系数定义为整数f∈[1,3];计算所有量子麻雀的适应度并进行排序,定义前百分之二十适应度的量子麻雀为生产者,后百分之八十的量子麻雀为跟随者,再从所有量子麻雀中随机抽取百分之二十的量子麻雀作为警戒者。
[0023]
3、步骤5中最大迭代次数是ta,则输出最佳适应度位置并更新本次循环估计时的波达方向矢量其中,若不是,则令t=t 1返回步骤4继续进行迭代。
[0024]
2、步骤6中自校正循环次数时,此时波达方向估计误差较大,采用稳定性更高的精英学习量子麻雀搜索机制进行相位误差估计;
[0025]
将互质阵列划分为两个均匀阵列a、b,以均匀阵列a为例,其含有个阵元,阵元间距为其阵列位置为均匀阵列a中的阵元在原互质阵列中的位置集合为其中,第个均匀阵列a中的子阵元对应原互质阵列中的第个阵元,从无穷范数归一化分数低阶协方差矩阵中提取相应位置的元素组成子阵列的分数低阶协方差矩阵记为其第行、第列的元素为列的元素为
[0026]
对精英学习量子麻雀搜索机制进行初始化,种群中量子麻雀个体数目为nb,最大迭代次数为tb,迭代标号为第次迭代时,第个量子麻雀的量子位置可以表示为且定义变量用以存储第次迭代为止的最佳量子麻雀对应的位置,设已知相位误差的上下限分别为u1和l1,设是原互质阵列中第个阵元在第i次循环前所估计的相位误差,其值对应均匀线阵a中第个阵元在第i次自校正循环的相位误差;当幅相误差自校正循环次数i=1时,量子麻雀的搜索边界下限和上限的第维分别等于相位误差的下限和上限即当i>1时,量子麻雀位置上下限
的第维的更新公式为其中,v1、v2和v3是自选参数;第次迭代时,第只量子麻雀输出的第维位置可以表示为均匀子阵列a的幅度误差矢量为其第个元素其中是步骤二中估计出的互质阵列中第个阵元的幅度误差,第次迭代时,幅相误差估计矩阵
⊙
是向量点乘,是第次迭代时,第个量子麻雀生成的相位误差矢量;利用幅相误差估计矩阵对子阵列的分数低阶相关矩阵进行幅相误差校正,得矩阵由上一步骤中所估计的波达方向角,可以生成均匀子阵列a的导向矢量矩阵为根据导向矢量和幅相误差校正后的分数低阶相关矩阵,可写出极大似然估计方程为可得第次迭代时,第个量子麻雀的量子位置适应度函数为随后采取步骤四中的精英学习量子麻雀搜索机理对均匀子阵列a进行相位误差估计,在迭代次数达到最大迭代次数tb后,由量子麻雀搜索机理的历史最优位置更新相位矢量和相位误差矢量其中
[0027]
对于均匀子阵列b,其含有个阵元,并设其阵元在原互质阵列中的位置集合为其中,第个均匀阵列b中的子阵元对应原互质阵列中的第个阵元,按照子阵列a的相位误差估计方法,可以估计出子阵列b的相位误差矢量集合并记为记原互质阵列的相位误差矢量更新后为其各个位置的元素分别等于两个均匀子阵列的相位误差矢量对应位置的元素,其中
[0028]
4、当时,设对分数低阶共变矩阵作特征分解,选取小特征值对应的个特征向量组成噪声子空间en,设设w=[1,0,...,0]
t
为维列向量,此时,相位误差更新公式为其中angle(
·
)代表复数取角度的操作,根据相位误差值可以生成相位误差矢量
[0029]
5、步骤7中自校正循环次数达到设定值,则输出波达估计角相位误差矢量和幅度误差矢量若没达到设定值,令i=i 1继续执行步骤2。
[0030]
本发明的有益效果在于:
[0031]
本发明针对现有冲击噪声环境下互质阵列的幅相误差校正和波达方向估计方法
的缺点和不足,本发明设计了一种冲击噪声环境下基于精英量子麻雀搜索机制的幅相误差校正和波达方向估计的方法,通过仿真可知,相比经典自校正估计算法,本专利提出的方法在冲击噪声、较大幅相误差的情况下具有更高的有效性和可靠性。
[0032]
本发明与现有的互质阵列在冲击噪声下的幅相误差校正技术相比,本发明不需要设置额外校正源,即可实现幅相误差校正和波达方向估计,提升了实际应用的实时性。传统的wf自校正方法对初次测向精度有较高要求,否则极易陷入局部最优值,本方法首先采取无穷范数加权结合分数低阶相关矩阵提升算法在冲击噪声下的稳定性,并采用精英学习量子麻雀搜索机理进行相位误差搜索,可以在初次测向精度较低的情况下搜索出精确的相位误差值,并将相位误差和幅度误差进行独立搜索与估计,可进一步提升自校正方法的稳定性。
附图说明
[0033]
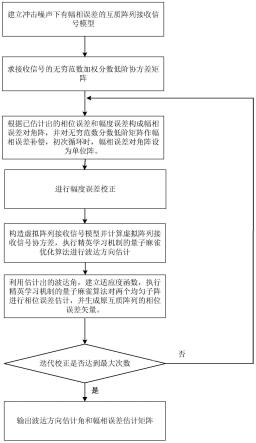
图1为本发明所设计的幅相误差校正和测向方法示意图;
[0034]
图2为精英学习量子麻雀搜索机制示意图;
[0035]
图3为是测向角度均方根误差与相位误差上下限关系曲线图;
[0036]
图4为是测向角度均方根误差与广义信噪比关系曲线图;
[0037]
图5为是幅相误差校正前后的谱峰搜索图。
具体实施方式
[0038]
下面结合附图对本发明做进一步描述。
[0039]
步骤一,建立冲击噪声下,存在幅相误差时互质阵列接收信号的数学模型。并计算接收信号的无穷范数归一化分数低阶相关矩阵。
[0040]
构建的互质阵列由a和b两个均匀子阵列组成。假定用于未知信号源信号波长为λ,设两个阵元的单位间距为阵列a含有个阵元,阵元间距为则阵列a的阵元位置是阵列b含有个阵元,阵元间距为则其阵元位置为其中,且二数互质。
[0041]
将a和b两个均匀阵列组合在一起,最后组成的互质阵列共由个阵元组成。假定有q个未知信号源发出信号,其信号来波方向与阵列法线夹角分别为θ1,θ2,...,θq,阵列第k次快拍数据x(k)=γa0(θ)s(k) n(k),k∈[1,k],a0(θ)=[a1(θ1),...,aq(θq)],阵列的幅相误差对角矩阵为其中,ρm,是第m个子阵元的幅度误差和相位误差,以首阵元为参考阵元并将其余阵元的幅相误差将其归一化后,有ρm=1,k次快拍后,阵元接收的信号数据矩阵为x=[x(1),...,x(k)],列向量其中(
·
)
t
代表矩阵求转置的操作,k∈[1,k]。设数据矢量h=[h1,h2,..,hk],其中则无穷范数归一化后的阵列接收信号矩阵可记为x
′
=[x
′
(1),...,x
′
(k)]=[x(1)/h1,...,x(k)/hk]。
[0042]
互质阵列接收数据归一化后的分数低阶相关矩阵c
floc
的第g行第h列元素可以表示为其中(
·
)
*
是求共轭操作,x
′g(k)和x
′h(k)分别是第g个和第h个阵元接收的第k次快拍数据经过无穷范数归一化后的值。g,p是任选计算常数,且0<p≤1。
[0043]
步骤二,根据无穷范数归一化分数低阶相关矩阵计算出互质阵元的幅度误差。
[0044]
设幅相误差自校正循环至第i次时估计的幅度误差矢量为估计的相位误差矢量记为估计的幅相误差对角矩阵为设自校正的最大循环次数为i,当i<i时,用第i次循环估计的幅相误差对角阵对分数低阶协方差矩阵进行幅相误差补偿,并记补偿后的分数低阶相关矩阵为其中(
·
)-1
是矩阵求逆操作,(
·
)h是矩阵求共轭转置操作。当i=1时,是单位阵。进行校正后,第m个阵元幅度误差值更新公式为其中,sqrt(
·
)是求均方根的操作,γn是冲击噪声的分散系数。
[0045]
步骤三,初始化精英量子麻雀搜索机制种群,并构造波达方向估计的目标函数和适应度函数。
[0046]
设幅相误差自校正算法在第i次循环时,所估计的相位误差向量为当i=1时,初始的相位误差向量可以记为由步骤二中更新的幅度误差向量为可得对角矩阵
⊙
是向量点乘操作,用其对分数低阶协方差矩阵进行幅相误差补偿,并设补偿后的分数低阶协方差矩阵为对补偿后的分数低阶协方差矩阵进行向量化,得到维的列向量再由原互质阵列生成其虚拟阵列,记虚拟阵列的阵元位置矢量为其中,ηs=d
s-v,矢量ν是原互质阵列的位置矢量。对矢量η进行去冗余,排序后,截取其中连续的个元素,组成均匀虚拟线阵阵元的位置集合用其截取列向量得到虚拟均匀阵元接收信号矢量然后采取空间平滑算法,将虚拟阵列分为个互相重叠的子阵列,每个阵列含有个均匀虚拟阵元,将子阵列的虚拟接收数据矢量拼接成一个维的矩阵其中,第l列矢量的元素对应虚拟均匀阵列接收信号矢量的第行。此时可以视为一个次快拍的信号接收矩阵,则其协方差矩阵ri可由矩阵的列向量估算为其中
[0047]
初始化精英量子麻雀搜索机制种群,设定种群中量子麻雀的个体数目为na,最大迭代次数为ta,迭代次数标号为t,且t∈[1,ta]。第t次迭代时,第只量子麻雀的量子位置记为且q是搜索空间维数,此处与信源个数相等,t=1时,量子麻雀量子位置的每一维元素都随机初始化为[0,1]之间的均匀随机数。
[0048]
本次循环时,第t次迭代第个量子麻雀位置可以表示为其中,和分别为自校正算法循环至第i次时,量子麻雀的搜索边界的位置下限和位置上限,且i=1时初始量子麻雀第q维的位置下限和上限分别为i>1时,量子麻雀第q维搜索边界的上下限更新公式为其中,c1、c2和c3是自选参数,是第i次循环自校正前估计的第q个未知信号源的来波方向角。可生成第只量子麻雀估计出的导向矢量为其中对均有是第个参与计算的虚拟均匀阵元位置,则极大似然方程可以写为第t次迭代时,第只量子麻雀位置的适应度值计算公式为
[0049]
步骤四,执行精英学习量子麻雀搜索机制进行波达方向估计。
[0050]
定义变量用于存储第i次循环直到第t次迭代为止的最佳量子麻雀对应的量子位置,记为同时,定义变量和分别记录本次迭代时最优适应度值、次优适应度值和次次优适应度值,对应量子位置分别为和
[0051]
定义随优化算法迭代次数t上升而非线性上升的变量定义精英引导矢量其中加权系数定义为整数f∈[1,3]。计算所有量子麻雀的适应度并进行排序,定义前百分之二十适应度的量子麻雀为生产者,后百分之八十的量子麻雀为跟随者,再从所有量子麻雀中随机抽取百分之二十的量子麻雀作为警戒者。
[0052]
(1)第个生产者的第q维量子旋转角的更新公式为
[0053][0054]
其中,是[0,1]间分布的随机数,是[0,1]间的随机数,s
t
是设定的[0.5,1]之间的常数,是标准正态分布随机数。
[0055]
(2)第个跟随者的第q维量子旋转角的更新公式为
[0056][0057]
其中,是标准正态分布随机数,是全1的q维列向量,设ζ是q维随机列向量,其元素为1或-1,ζ
=ζ
t
(ζζ
t
)-1
,是t次迭代时精英引导矢量的第q维量子位置的坐标。是第t次迭代时适应度最差的麻雀的第q维量子位置的坐标。
[0058]
(3)第个警戒者的第q维量子旋转角的更新公式为
[0059][0060]
其中,是第个量子麻雀第t代的适应度,是高斯随机数,是[-1,1]之间的均匀随机数,是当前迭代时最差的适应度值,ε为尽可能小的正数,通常取ε=10-50
,以防止计算中出现分母为0的现象。
[0061]
随后,根据量子旋转角更新麻雀的量子位置,第只量子麻雀的第q维量子位置更新公式为
[0062]
步骤五,检测迭代次数t是否等于最大迭代次数ta,若是,则输出最佳适应度位置并更新本次循环估计时的波达方向矢量其中,若不是,则令t=t 1返回步骤四继续进行迭代。
[0063]
步骤六,进行相位误差估计和校正。
[0064]
当自校正循环次数时,此时波达方向估计误差较大,采用稳定性更高的精英学习量子麻雀搜索机制进行相位误差估计。
[0065]
将互质阵列划分为两个均匀阵列a、b,以均匀阵列a为例,其含有个阵元,阵元间距为其阵列位置为设均匀阵列a中的阵元在原互质阵列中的位置集合为其中,第个均匀阵列a中的子阵元对应原互质阵列中的第个阵元,从无穷范数归一化分数低阶协方差矩阵中提取相应位置的元素组成子阵列的分数低阶协方差矩阵记为其第行、第列的元素为列的元素为
[0066]
对精英学习量子麻雀搜索机制进行初始化,设种群中量子麻雀个体数目为nb,最大迭代次数为tb,迭代标号为第次迭代时,第个量子麻雀的量子位置可以表示为且定义变量用以存储第次迭代为止的最佳量子麻雀对应的位置,设已知相位误差的上下限分别为u1和l1,设是原互质阵列中第个阵元在第i次循环前所估计的相位误差,其值对应均匀线阵a中第个阵元在第i次自校正循环的相位误差。当幅相误差自校正循环次数i=1时,量子麻雀的搜索边界下限和上限的第维分别等于相位误差的下限和上限即当i>1时,量子麻雀位置上下限的第维的更新
公式为其中,v1、v2和v3是自选参数。设第次迭代时,第只量子麻雀输出的第维位置可以表示为设均匀子阵列a的幅度误差矢量为其第个元素其中是步骤二中估计出的互质阵列中第个阵元的幅度误差,第次迭代时,幅相误差估计矩阵
⊙
是向量点乘,是第次迭代时,第个量子麻雀生成的相位误差矢量。利用幅相误差估计矩阵对子阵列的分数低阶相关矩阵进行幅相误差校正,得矩阵由上一步骤中所估计的波达方向角,可以生成均匀子阵列a的导向矢量矩阵为根据导向矢量和幅相误差校正后的分数低阶相关矩阵,可写出极大似然估计方程为可得第次迭代时,第个量子麻雀的量子位置适应度函数为随后采取步骤四中的精英学习量子麻雀搜索机理对均匀子阵列a进行相位误差估计,在迭代次数达到最大迭代次数tb后,由量子麻雀搜索机理的历史最优位置更新相位矢量和相位误差矢量其中
[0067]
对于均匀子阵列b,其含有个阵元,并设其阵元在原互质阵列中的位置集合为其中,第个均匀阵列b中的子阵元对应原互质阵列中的第个阵元,按照子阵列a的相位误差估计方法,可以估计出子阵列b的相位误差矢量集合并记为记原互质阵列的相位误差矢量更新后为其各个位置的元素分别等于两个均匀子阵列的相位误差矢量对应位置的元素,其中
[0068]
当时,设对分数低阶共变矩阵作特征分解,选取小特征值对应的个特征向量组成噪声子空间en,设设w=[1,0,...,0]
t
为维列向量,此时,相位误差更新公式为其中angle(
·
)代表复数取角度的操作,根据相位误差值可以生成相位误差矢量
[0069]
步骤七,判断自校正循环次数是否达到设定值,若是,则输出波达估计角相位误差矢量和幅度误差矢量若不是,令i=i 1继续执行步骤二。
[0070]
根据图3和图4,不进行幅相误差校正直接进行基于精英量子麻雀搜索机理的测向方法记作gaqssq-floc-music算法,信号和噪声都服从复同向的alpha稳定分布,且冲击噪
声参数为α=1.3,分数低阶相关矩阵计算参数p=0.6,信号波长λ=1,阵元间距并设定和三个未知信号的来波方向分别是-20
°
、0
°
和20
°
,幅度误差设定为0.8至1.2之间的随机数,设定i=6,蒙特卡洛试验次数为100次。
[0071]
另外,在图3中,设定相位误差为[-o,o]之间的随机数,o分别为5
°
、10
°
、15
°
、25
°
、35
°
,广义信噪比设定为10db,参数c1=30、c2=2.2、c3=1.5、v1=1.4o、v2=1.8和v3=1.5,在图4中,设定广义信噪比为1db、4db、6db、9db、12db和15db,相位误差设定为[-20
°
,20
°
]之间的随机数,参数c1=30、c2=2.2、c3=1.5、v1=28、v2=1.8和v3=1.5,从最终结果可知,在较大相位误差和冲击噪声背景下wf性能出现较大下降,且容易出现估计失败的情况,本专利提出的幅相误差自校正方法在不同相位误差条件下均有较好的稳定性。在20
°
相位误差下,wf自校正方法几乎失效,本专利提出的自校正方法在极低信噪比时效果较差,在信噪比变大时性能提升明显。
[0072]
根据图5,是本发明提出的基于精英学习量子麻雀搜索机理的幅相误差自校正方法的谱峰搜索图,设定冲击噪声参数为α=1.6,计算参数p=0.75,阵列设置和图3实验中相同。三个信号的来波方向分别设置为-15
°
、0
°
和15
°
,广义信噪比为15db,幅度误差设定为0.8至1.2之间的随机数,相位误差设定为[-25
°
,25
°
]之间的随机数,并设定参数i=6、c1=30、c2=2.2、c3=1.5、v1=35、v2=1.8和v3=1.5,搜索间隔设置为0.01
°
,其中不进行幅相误差校正直接进行谱峰搜索的方法记作floc-music,可以看出,在未校正情况下,floc-music谱峰出现偏移,校正后偏移减小,可以估计出更精确的波达方向角。
[0073]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。