1.本发明涉及游乐机械设备控制技术领域,特别涉及一种高刚性气电混合的六自由度冗余动感平台及控制方法。
2.
背景技术:
3.近年来,随着现代制造技术的不断升级,人们的休闲娱乐已不满足于过山车、摩天轮等传统娱乐项目的体验,人们对娱乐项目的多样化、个性化提出了需求,特别是近年来虚拟现实技术的不断发展,使得虚拟场景结合硬件的实现场景再现的娱乐项目如雨后春笋般涌现,极大满足了人们休闲娱乐的需求,然而市场上此类项目同质化严重,往往一台设备只能适应特定的几个场景,无法满足场景、影片内容迅速更换的需要。
4.此外,部分同类项目设计之初由于平台自由度少的缘故,导致一些动作无法实现,或者平台运动范围限制,也极大限制了场景内容的发挥,最终导致项目体验效果不足。因此,如何提升动感平台工作过程中使用人员的乘坐体验,保障游玩过程的安全性、可靠性,提升动感平台的刚性,成为当前动感平台的一个亟需解决的问题。
技术实现要素:
5.本发明的目的在于提供一种高刚性气电混合的六自由度冗余动感平台及控制方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明一种高刚性气电混合的六自由度冗余动感平台,包括固定底盘、六轴伺服电缸系统、四轴气缸系统、动感平台和乘客安全座椅,所述乘客安全座椅位于动感平台上,动感平台底部通过六轴伺服电缸系统装配在固定底盘上,动感平台位于四周与地面之间装配有四轴气缸系统,所述六轴伺服电缸系统主要用以并联连接六套同等规格的伺服电缸,伺服电缸首、尾各通过三套虎克铰并联连接,与地面连接固定的三组虎克铰及其它附属结构件为六自由度平台的下部分,三组虎克铰的定位中心形成六自由度平台的下节圆;与主承载骨架连接的三组虎克铰为六自由度平台的上部分,三组虎克铰各自的定位中心形成六自由度平台的上节圆。
7.进一步地,所述六轴伺服电缸系统的上下升降运动范围为
±
530mm;左右平移运动范围为
±
340mm;前后平移运动范围为
±
390mm;俯仰运动范围为-13.5
°
~17
°
;左右摇摆运动范围为
±
12
°
;偏航运动范围为
±
10
°
。
8.进一步地,所述的六轴伺服电缸系统包括伺服电缸、固定端双头虎克铰和运动端双头虎克铰,所述的固定端双头虎克铰用于将两个伺服电缸的固定部分连接在固定底盘上,所述的运动端双头虎克铰用于将两个伺服电缸的运动部分连接在动感平台上。
9.进一步地,所述四轴气缸系统,包括气缸、固定端单头虎克铰和运动端单头虎克铰,所述的固定端单头虎克铰用于将气缸的固定部分连接在地面或安装平台上,所述的运动端单头虎克铰用于将气缸的运动部分连接在动感平台上。
10.进一步地,所述伺服电缸设有上、下限位锁定结构,以防止控制器程序出错,导致各自由度运动范围超行程。
11.一种高刚性气电混合的六自由度冗余动感平台的控制方法,具体如下:s1: 采用多项式方法进行轨迹动感平台运动轨迹规划,在轨迹规划的基础上进行动感平台的运动学反解;s2:动感平台的局部坐标系为{a}oa-xayaza,固定底盘中心坐标系{b}为ob-xbybzb,虎克铰中心在{a}中的坐标为ai,在{b}中的坐标为bi,则将动感平台虎克铰点坐标转化为定坐标系下表述为:bi=rai p(1)中r和p分别为{a}相对于{b}的旋转矩阵和位置;由式(1),伺服电缸的位置pi可表示为:pi=bi*ni (2)ni为伺服电缸单位方向矢量,由式(2)即可获得动感平台在工作过程中的控制量;s3: 气缸的跟随控制,通过同步器,将伺服电缸的位置信息同步给气缸控制系统,气缸控制系统控制六轴伺服电缸系统和四轴气缸系统协作完成动感平台的运动驱动和刚度支撑。
12.本发明的技术效果和优点:通过采用伺服电缸和气缸相结合的方式,既能保证动感平台是运动刚性,又能降低动感平台部署成本,通过气缸控制系统对伺服电缸和气缸协调同步控制,可以保证动感平台在工作过程中的安全性能,实现其运动范围内空间任意缸体的位姿调整,从而实现平台与影片内容、场景更换的灵活跟随。
13.附图说明
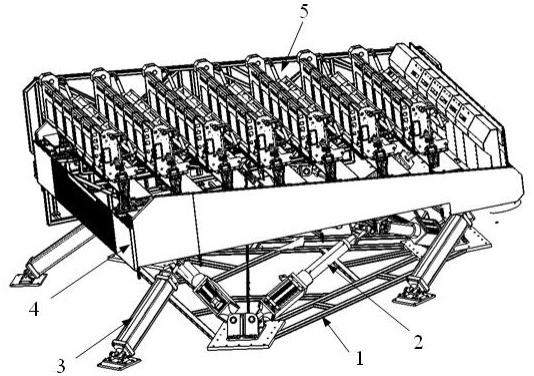
14.附图1是本发明的高刚性气电混合的六自由度冗余动感平台系统示意图;附图2是本发明高刚性气电混合的六自由度冗余动感平台示意图;附图3是本发明高刚性气电混合的六自由度冗余动感平台控制方法示意图。
15.图中:1、固定底盘,2、六轴伺服电缸系统,21、伺服电缸,22、固定端双头虎克铰,23、运动端双头虎克铰,3、四轴气缸系统,31、气缸,32、固定端单头虎克铰,33、运动端单头虎克铰,4、动感平台,5、乘客安全座椅。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.本发明提供了如图1-3所示的本发明一种高刚性气电混合的六自由度冗余动感平台,包括固定底盘1、六轴伺服电缸系统2、四轴气缸系统3、动感平台4和乘客安全座椅5,所述乘客安全座椅5位于动感平台4上,动感平台4底部通过六轴伺服电缸系统2装配在固定底盘1上,动感平台4位于四周与地面之间装配有四轴气缸系统3,所述六轴伺服电缸系统2主
要用以并联连接六套同等规格的伺服电缸21,伺服电缸21首、尾各通过三套虎克铰并联连接,与地面连接固定的三组虎克铰及其它附属结构件为六自由度平台的下部分,三组虎克铰的定位中心形成六自由度平台的下节圆;与主承载骨架连接的三组虎克铰为六自由度平台的上部分,三组虎克铰各自的定位中心形成六自由度平台的上节圆。
18.进一步地,所述六轴伺服电缸系统2的上下升降运动范围为
±
530mm;左右平移运动范围为
±
340mm;前后平移运动范围为
±
390mm;俯仰运动范围为-13.5
°
~17
°
;左右摇摆运动范围为
±
12
°
;偏航运动范围为
±
10
°
。
19.进一步地,所述的六轴伺服电缸系统包括伺服电缸21、固定端双头虎克铰22和运动端双头虎克铰23,所述的固定端双头虎克铰22用于将两个伺服电缸21的固定部分连接在固定底盘1上,所述的运动端双头虎克铰23用于将两个伺服电缸21的运动部分连接在动感平台4上。
20.进一步地,所述四轴气缸系统3,包括气缸31、固定端单头虎克铰32和运动端单头虎克铰33,所述的固定端单头虎克铰32用于将气缸31的固定部分连接在地面或安装平台上,所述的运动端单头虎克铰33用于将气缸31的运动部分连接在动感平台4上。
21.进一步地,所述伺服电缸21设有上、下限位锁定结构,以防止控制器程序出错,导致各自由度运动范围超行程。
22.一种高刚性气电混合的六自由度冗余动感平台的控制方法,具体如下:s1: 采用多项式方法进行轨迹动感平台运动轨迹规划,在轨迹规划的基础上进行动感平台的运动学反解;s2:动感平台的局部坐标系为{a}oa-xayaza,固定底盘中心坐标系{b}为ob-xbybzb,虎克铰中心在{a}中的坐标为ai,在{b}中的坐标为bi,则将动感平台虎克铰点坐标转化为定坐标系下表述为:bi=rai p(1)中r和p分别为{a}相对于{b}的旋转矩阵和位置;由式(1),伺服电缸的位置pi可表示为:pi=bi*ni (2)ni为伺服电缸单位方向矢量,由式(2)即可获得动感平台在工作过程中的控制量;s3: 气缸的跟随控制,通过同步器,将伺服电缸的位置信息同步给气缸控制系统,气缸控制系统控制六轴伺服电缸系统和四轴气缸系统协作完成动感平台的运动驱动和刚度支撑。
23.本发明通过采用并联式六自由度机械系统,驱动机构为六套同规格的伺服电缸21,通过伺服电缸21首、尾的并联连接,最终实现动感平台4的六自由度运动,其中上下升降运动、左右平移运动及前后平移运动可在运动范围内实现三维空间任意一点的定位,而俯仰运动、滚动运动及偏航运动则能改变运动范围内三维空间内任意点的姿态,动感平台4各个自由度方向上的运动通过伺服电缸21的上、下限位锁定,以防止控制器程序出错,导致各自由度运动范围超行程,造成不必要的人员伤害及设备损伤。
24.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。