1.本发明涉及智能控制技术领域,具体涉及一种低电量助力车的换电规划方法及系统。
背景技术:
2.随着共享经济技术的发展,共享电助力车给人们出行带来了极大方便。而如何有效的为共享电助力车换电成为共享服务提供方急需解决的问题。
3.目前,用户租赁平台的助力车,平台提供换电服务,当用户的电助力车没电时,用户需要将低电量助力车归还到目标管控区域内,当系统收到低电量助力车的位置信息后,运维人员通过系统显示的各个区域低电量助力车位置,根据自身判断进行区域内的低电量助力车换电,这种方式主要依赖于运维人员自身的判断能力,不能高效的在区域内进行助力车换电操作,存在运维人员在对助力车进行换电操作时发生一条路多趟跑的情况从而会降低换电效率,影响用户体验。
4.在此基础上,在助力车需要进行换电时,会根据车身位置、车身状态、车身电量以及周围的换电站或充电柜进行信息整合以及路径规划,从而选择最优路线对助力车进行换电规划。
技术实现要素:
5.本发明提供了一种低电量助力车的换电规划方法及系统,用于针对解决现有技术中存在的低电量助力车换电规划过程中对车辆位置、车辆电量、车辆状态的管控不足,使得最终的低电量助力车在换电规划中无法达到合理化精准管控从而降低换电效率的技术问题。
6.鉴于上述问题,本发明提供了一种低电量助力车的换电规划方法及系统。
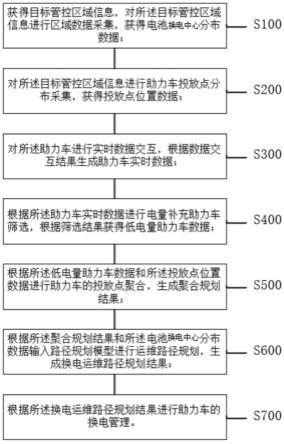
7.第一方面,本发明提供了一种低电量助力车的换电规划方法,所述方法包括:获得目标管控区域信息,对所述目标管控区域信息进行区域数据采集,获得电池换电中心分布数据;对所述目标管控区域信息进行助力车投放点分布采集,获得投放点位置数据;对所述助力车进行实时数据交互,根据数据交互结果生成助力车实时数据;根据所述助力车实时数据进行电量补充助力车筛选,根据筛选结果获得低电量助力车数据;根据所述低电量助力车数据和所述投放点位置数据进行助力车的投放点聚合,生成聚合规划结果;根据所述聚合规划结果和所述电池换电中心分布数据输入路径规划模型进行运维路径规划,生成换电运维路径规划结果;根据所述换电运维路径规划结果进行助力车的换电管理。
8.第二方面,本发明提供了一种低电量助力车的换电规划系统,所述系统包括:数据采集模块:所述数据采集模块用于获得目标管控区域信息,对所述目标管控区域信息进行区域数据采集,获得电池换电中心分布数据;位置数据模块:所述位置数据模块用于对所述目标管控区域信息进行助力车投放点分布采集,获得投放点位置数据;实时数据模块:所述实时数据模块用于对所述助力车进行实时数据交互,根据数据交互结果生成助力车实时数
据;助力车筛选模块:所述助力车筛选模块用于根据所述助力车实时数据进行电量补充助力车筛选,根据筛选结果获得低电量助力车数据;聚合规划模块:所述聚合规划模块用于根据所述低电量助力车数据和所述投放点位置数据进行助力车的投放点聚合,生成聚合规划结果;路径规划模块:所述路径规划模块用于根据所述聚合规划结果和所述电池换电中心分布数据输入路径规划模型进行运维路径规划,生成换电运维路径规划结果;换电管理模块:所述换电管理模块用于根据所述换电运维路径规划结果进行助力车的换电管理。
9.本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
10.本发明公开了一种低电量助力车的换电规划方法及系统,涉及智能控制技术领域,方法包括:由目标管控区域信息进行区域数据采集与助力车投放点分布采集,获得电池换电中心分布数据与投放点位置数据,助力车进行实时数据交互,将助力车实时数据进行电量补充助力车筛选,得到低电量助力车数据,低电量助力车数据和投放点位置数据进行助力车的投放点聚合,将聚合规划结果与电池换电中心分布数据输入路径规划模型进行运维路径规划,再将换电运维路径规划结果进行助力车的换电管理,解决了现有技术中低电量助力车换电规划过程中对车辆位置、电量、状态的管控不足从而降低助力车的换电效率,实现了对低电量助力车在换电规划中的合理化精准管控,完善该助力车的换电以及使用频率。
附图说明
11.图1为本发明的一种低电量助力车的换电规划方法流程示意图;
12.图2为本发明的一种低电量助力车的换电规划方法中路径影响参数流程示意图;
13.图3为本发明的一种低电量助力车的换电规划方法中实时交通调整路径流程示意图;
14.图4为本发明的一种低电量助力车的换电规划方法中换电运维路径规划结果的路径优化流程示意图;
15.图5为本发明的一种低电量助力车的换电规划方法中低电量助力车流程示意图;
16.图6为本发明提供了一种低电量助力车的换电规划系统结构示意图。
17.附图标记说明:数据采集模块a,位置数据模块b,实时数据模块c,助力车筛选模块d,聚合规划模块e,路径规划模块f,换电管理模块g。
具体实施方式
18.本技术通过提供一种低电量助力车的换电规划方法,用于解决现有技术中低电量助力车换电规划过程中对车辆位置、电量、状态的管控不足从而降低助力车的换电效率的问题。
19.实施例一
20.如图1所示,本技术实施例提供了一种低电量助力车的换电规划方法,该方法应用于智能控制系统,该智能控制系统与助力车通信连接,所述方法包括:
21.步骤s100:获得目标管控区域信息,对所述目标管控区域信息进行区域数据采集,获得电池换电中心分布数据;
22.具体而言,本技术实施例提供的一种低电量助力车的换电规划方法应用于智能控
制系统,该智能控制系统与助力车通信连接。
23.首先获得该目标助力车的管控区域信息,管控区域可以是由人为或建筑物划定的特定区域,以西安为例,该管控区域可以是三环以内,则对三环以内进行区域数据采集,即对该指定目标管控区域三环以内,进行对换电站的位置、电量以及换电站之间的距离,进一步获得电池换电中心的分布数据,其中电池换电中心是指助力车在低电量状态下需要去换电站也就是电池换电中心进行助力车的换电或充电,以此来维持助力车的正常骑行,并同时对每一个电池换电中心的位置进行整合,从而生成该电池换电中心的分布数据,从而为实现智能控制的助力车换电管理打下坚实的基础。
24.步骤s200:所述目标管控区域信息进行助力车投放点分布采集,获得投放点位置数据;
25.具体而言,以目标管控区域信息作为基础,对目标管控区域内的助力车进行助力车投放点分布采集,示例性的,助力车投放点需要根据用户需求量来进行确定,主要在需求量大的位置进行重点投放,一般为地铁口、小区门口、学校门口等,对上述这些助力车投放点进行采集与整合,进一步获得更为详细的助力车投放点位置,进一步通过获取投放点位置数据为之后进行助力车的换电管理作为重要依据之一。
26.步骤s300:对所述助力车进行实时数据交互,根据数据交互结果生成助力车实时数据;
27.具体而言,在助力车运行、静止、锁定、充电、低电等状态时,对目标助力车进行实时的数据交互,即助力车当前是何状态、在何位置、是何电量,都会由车与平台进行交互,当连接完成后可以通过车辆语音进行导航,同时具备换电站点提醒、超区提醒等功能,平台可通过定位系统实现车辆定位,设置电子围栏进行车辆停放管理,定位系统还能防盗,助力车的定位系统不仅为用户服务同时也为运维人员服务,运维人员可以通过该定位装置了解助力车的实时位置,给低电量的助力车进行换电,并将不在指定停车范围内的助力车移动到停车范围内,同时实现助力车区域调度的分配等操作,在此基础上,获得助力车实时位置、状态、电量等数据,为后续助力车换电管理提供重要参考。
28.步骤s400:根据所述助力车实时数据进行电量补充助力车筛选,根据筛选结果获得低电量助力车数据;
29.具体而言,通过助力车实时位置、状态、电量等数据后,对低电量的助力车进行电量补充筛选,举例而言,将电量低于20%划定为低电量,因此,当数据监测到助力车的电量低于20%时,将该电量低于20%的助力车筛选出来,并同时判定为需要电量补充的助力车,再由该筛选判定结果生成低电量助力车数据,以此为后期助力车在低电量时的换电管理提供参考依据。
30.步骤s500:根据所述低电量助力车数据和所述投放点位置数据进行助力车的投放点聚合,生成聚合规划结果;
31.具体而言,基于上述低电量助力车数据与助力车投放点位置数据,进行助力车的投放点聚合,即对于电量低于20%的低电量车的位置进行细化,示例性的,当不同的区域内出现多个电量低于20%的低电量助力车,那么则需要将这些低电量的助力车进行统计与整合,当同一区域内的低电量助力车占比达到当前区域所有助力车的40%,则视为当前区域低电量助力车占比高,故此,当小区门口所停放的低电量助力车的占比高时,则需要对该投
放点以及该投放点位置进行记录,即将低电量助力车与投放点的位置数据进行整合,根据低电量助力车的占比对助力车投放点进行聚合,进一步生成聚合规划结果,从而使得助力车的换电管理更为精准以及合理化。
32.步骤s600:根据所述聚合规划结果和所述电池换电中心分布数据输入路径规划模型进行运维路径规划,生成换电运维路径规划结果;
33.具体而言,将助力车聚合规划结果与助力车电池换电中心分布数据相整合,即根据助力车与平台进行实时数据交互生成的助力车实时数据对每一个助力车进行关于助力车电量低于20%的低电量助力车进行筛选,进而得到低电量助力车数据,再将该低电量助力车数据与以目标管控区域信息为基础采集的助力车投放点分布情况进行聚合,得出低电量助力车的投放点位置数据,将该数据与上述电池运维即换电站分布数据相结合,再输入路径规划模型进行运维路径规划,该路径规划模型是指在目标管控区域内给出合理的目标函数,并在一定范围内找到目标函数的最优解,使得智能控制系统为低电量助力车找到一条从起点到换电站点的安全无障碍且距离最近的运维路径,进一步生成换电运维路径规划结果,以便对后续的换电管理路径进行合理的判断。
34.步骤s700:根据所述换电运维路径规划结果进行助力车的换电管理。
35.具体而言,该智能控制系统基于低电量助力车的车辆位置、车辆状态、车辆电量以及助力车投放点实时位置数据与换电站相互匹配,得到换电运维路径规划结果,其中换电运维路径规划结果是指在助力车电量低于20%被判定为低电量助力车时,智能控制系统将会提醒用户或运维人员该助力车为低电量助力车,该低电量助力车需要去换电站进行换电充电的操作,进一步根据该低电量助力车的实时位置交互对该低电量助力车进行定位,并在目标管控区域寻找离该低电量助力车最近最优路线的换电站,将所生成路线呈现给运维人员,以便运维人员根据该换电运维路径规划结果进行助力车的换电管理。
36.进一步的,由目标管控区域信息进行区域数据采集与助力车投放点分布采集,获得电池换电中心分布数据与投放点位置数据,助力车进行实时数据交互,将助力车实时数据进行电量补充助力车筛选,得到低电量助力车数据,低电量助力车数据和投放点位置数据进行助力车的投放点聚合,将聚合规划结果与电池换电中心分布数据输入路径规划模型进行运维路径规划,再将换电运维路径规划结果进行助力车的换电管理,解决现有技术中低电量助力车换电规划过程中对车辆位置、电量、状态的管控不足,实现对低电量助力车在换电规划中的合理化精准管控,完善该助力车的换电以及使用频率。
37.进一步而言,如图2所示,本技术步骤s700还包括:
38.步骤s710:采集助力车投放点的历史用车数据;
39.步骤s720:对所述历史用车数据进行数据解析,根据数据解析结果生成投放点标识数据;
40.步骤s730:根据所述投放点标识数据获得所述助力车投放点的时间窗口流通量数据;
41.步骤s740:通过所述助力车实时数据进行所述助力车投放点的助力车与所述时间窗口流通量数据的匹配评价,生成匹配评价结果;
42.步骤s750:根据所述匹配评价结果生成所述助力车投放点的路径影响参数;
43.步骤s760:通过所述路径影响参数进行运维路径规划调整,获得调整换电运维路
径规划结果,通过所述调整换电运维路径规划结果进行助力车的换电管理。
44.具体而言,将目标管控区域内的助力车投放点中的历史用车数据进行采集并统计,基于该历史用车数据,对目标管控区域内的历史用车数据进行数据解析,示例性的,不同区域内对助力车的需求不同,在历史用车数据中主要筛选出对助力车需求大但助力车供给不足与对助力车需求小但助力车供给过量的两种区域,由数据解析结果得出助力车投放点标识数据,即该目标管控区域中关于助力车的流通量,是指对上述所筛出的两种典型区域需要类似于站点的调度,将对助力车需求小但助力车供给过量的区域中的助力车调度给对助力车需求大但助力车供给不足的区域,以满足各个区域助力车的供需问题,再由所得投放点标识数据得到助力车投放点的时间窗口流通量数据,其中该助力车投放点的时间窗口流通量数据是指在目标管控区域内该助力车投放点的助力车流通量根据一定的间隔时间,将时间轴切分成一块一块的独立小块,然后基于这些小块进行流通量的统计所得的数据为助力车投放点的时间窗口流通量数据,再进而将该数据与助力车在助力车投放点的实时位置数据进行匹配,进一步生成基于助力车投放点的实时位置上的时间窗口流量数据结果,再由该匹配评价结果为基础,生成助力车投放点的路径影响参数,是指助力车在不同区域中进行调度时也同时会产生低电量助力车,并且在调度的过程中也会牵扯调度路线,根据不同区域的不同供给需求以及不同区域之间的路线不同,通过在目标管控区域内找到两两区域内的最优解,以及在调度过程中筛查出的低电量助力车需要直接送去换电站进行充电换电,对助力车投放点的路径影响参数进行调整换电运维路径规划结果,在此基础上对助力车进行更高效的换电管理。
45.进一步而言,本技术步骤s760还包括:
46.步骤s761:通过大数据构建路径影响参数训练数据集合;
47.步骤s762:通过所述路径影响参数训练数据集合进行所述路径规划模型的增量学习,获得增量学习路径规划模型;
48.步骤s763:将所述聚合规划结果、所述电池换电中心分布数据和所述路径影响参数输入所述增量学习路径规划模型,获得所述调整换电运维路径规划结果。
49.具体而言,基于大数据对路径规划进行构建影响参数训练数据集合,即在运维人员对低电量助力车进行调整换电时,在其运维过程中,该路段可能会出现的一些路径影响,例如,临时的道路施工、换电站点的迁移、投放点的取消或新增等,将这些路径影响参数归纳整合并与大数据进行匹配生成路径影响参数训练数据集合,但在已有的路径影响参数训练数据集合中不包含生成集合后的新增路况,故此,路径规划模型需要不断地进行增量学习,即道路的临时封控、换电站的临时抢修等,进而初步生成增量学习路径规划模型,进一步再将该聚合规划结果与电池换电中心分布数据以及上述路径影响参数三者进行整合,输入上述初步生成的增量学习路径规划模型,对该路径规划模型进行扩充,即对于低电量助力车的投放位置数据、换电站点的位置数据以及在这两地之间运维时的路况,其中包含正常路况与新增路况,在此基础上,对换电运维路径规划结果进行实时的调整,以此生成调整换电运维路径规划结果来对换电管理进行辅助。
50.进一步而言,如图3所示,本技术步骤s600还包括:
51.步骤s610:获得实时交通数据;
52.步骤s620:根据所述实时交通数据进行所述换电运维路径规划结果的实时执行路
径调整,获得实时调整结果;
53.步骤s630:通过所述实时调整结果进行助力车的换电管理。
54.具体而言,在路径规划模型中进行运维路径规划的同时,同时对该路线中的交通数据进行采集,将所获得的实时交通数据与换电运维路径规划结果进行整合,进一步对该运维路径根据实时交通数据执行实时的路径调整,所调整后的运维路径为适时调整结果,再将根据该实时调整结果对助力车的换电管理进行适当的调整,示例性的,若在运维路径规划中的实时交通数据显示为严重拥堵,那么可以将该严重拥堵路段所耗费的时间与走小道或是绕路的时间相比较,比较出耗费时间少的一条道路,选择走小道或是绕路根据交通路况进行实时调整,以此达到在进行助力车的换电管理时可以节省助力车换电的时间成本。
55.进一步而言,如图4所示,本技术步骤s500还包括:
56.步骤s510:获得目标管控区域内的助力车行驶数据;
57.步骤s520:设定标定时间阈值,通过所述标定时间阈值进行所述助力车行驶数据筛选,根据筛选结果获得标定助力车的位置分布数据;
58.步骤s530:根据所述位置分布数据和所述投放点位置数据进行所述标定助力车的位置优化聚合,获得位置优化聚合结果;
59.步骤s540:根据所述位置优化聚合结果进行所述换电运维路径规划结果的路径优化。
60.具体而言,由助力车的实时位置数据可获得在目标管控区域内的助力车的行驶数据,进而设定一个标定时间阈值,例如,该标定时间阈值可设定为两天,由每两天对助力车行驶数据进行筛选,若在标定时间阈值内助力车被使用的次数大于等于一次,则该助力车被划定为正常使用范畴,若在标定时间阈值内助力车被使用的次数小于一次,即在标定时间阈值内无人骑车,则该助力车被划定为“僵尸”车,并根据助力车行驶数据筛选结果生成标定助力车的位置分布数据,其中该标定助力车特指被划定为“僵尸”车的助力车,由所获得的该“僵尸”车的位置分布数据与投放助力车的投放点的位置数据相整合,进一步对标定助力车的位置进行优化聚合,即对存在“僵尸”车多的助力车投放点进行记录,并在换电运维路径规划中优先将“僵尸”车进行调度,在此基础上优化并生成新的换电运维路径桂华结果的路径,为实时优化并保证换电管理的正常运行。
61.进一步而言,本技术步骤s510还包括:
62.步骤s511:获得所述标定助力车的运行数据;
63.步骤s512:根据所述运行数据对所述标定助力车进行状态评价,生成状态评价结果;
64.步骤s513:获得运维人员的初检评价结果;
65.步骤s514:根据所述状态评价结果和所述初检评价结果生成检修反馈参数,通过所述检修反馈参数进行所述标定助力车的检修处理。
66.具体而言,基于助力车的实时位置数据对助力车的运行数据进行标定,其中助力车的运行数据包括但不仅限于实时位置、启动时间、怠速时间、骑行时间、电池工作小时、行驶轨迹、电瓶电压、行驶速度等,再根据所获助力车运行数据标定助力车并进行助力车的状态评价,当助力车运行数据中的各项指标传输回智能控制系统后,智能控制系统根据所得
值与常值进行比对,在正常范围内时其状态评价为正常状态,当助力车运行数据中的任何一项指标与常值比对出现异常情况时其状态评价为异常情况,再进一步由运维人员对助力车肉眼可见的车辆情况,例如,车辆受损、刹车失灵、轮胎变形等,对助力车进行初步的初检,并同时生成运维人员的初检评价结果,再将上述状态评价结果与初检评价结果相整合,生成检修反馈参数,即判断该助力车所出现的内在与外在的问题,并将需要检修的问题进行汇总从而生成检修反馈参数,进而对该编订的助力车进行检修处理,以保证助力车的正常使用。
67.进一步而言,如图5所示,本技术步骤s400还包括:
68.步骤s410:根据所述助力车实时数据获得停车状态的停车助力车电量数据和位置分布,根据所述停车助力车电量数据和位置分布筛选获得第一低电量助力车数据;
69.步骤s420:根据所述助力车实时数据获得运行状态的运行助力车电量数据和目的地数据;
70.步骤s430:根据所述运行助力车电量数据和目的地数据进行耗电预估,基于耗电预估结果和所述目的地数据筛选获得第二低电量助力车数据;
71.步骤s440:根据所述第一低电量助力车数据和所述第二低电量助力车数据获得所述低电量助力车数据。
72.具体而言,由所获得的助力车实时位置数据分别获得该助力车停车状态时的助力车电量数据与位置分布,以及该助力车运行状态时的助力车电联数据与目的地数据,将停车状态下的助力车电量数据与位置数据的分布进行筛选,即在目标管控区域内所有为停车状态的助力车中,将低电量的助力车的位置数据进行记录,并将所记录的结果记为第一低电量助力车数据,进一步再将助力车为运行状态的电量数据与助力车需要到达的目的地数据进行耗电预估,将当前助力车所剩的电量可续航公里数与该助力车到目的地的公里数进行对比,从而生成第二低电量助力车数据,最终将上述第一低电量助力车数据与第二低电量助力车数据相整合,得到低电量助力车数据,为最终给助力车进行换电管理时精准定位低电量助力车提供重要参考依据。
73.实施例二
74.基于与前述实施例中一种低电量助力车的换电规划方法相同的发明构思,如图6所示,本技术提供了一种低电量助力车的换电规划系统,系统包括:
75.数据采集模块a:所述数据采集模块a用于获得目标管控区域信息,对所述目标管控区域信息进行区域数据采集,获得电池换电中心分布数据;
76.位置数据模块b:所述位置数据模块b用于对所述目标管控区域信息进行助力车投放点分布采集,获得投放点位置数据;
77.实时数据模块c:所述实时数据模块c用于对所述助力车进行实时数据交互,根据数据交互结果生成助力车实时数据;
78.助力车筛选模块d:所述助力车筛选模块d用于根据所述助力车实时数据进行电量补充助力车筛选,根据筛选结果获得低电量助力车数据;
79.聚合规划模块e:所述聚合规划模块e用于根据所述低电量助力车数据和所述投放点位置数据进行助力车的投放点聚合,生成聚合规划结果;
80.路径规划模块f:所述路径规划模块f用于根据所述聚合规划结果和所述电池换电
中心分布数据输入路径规划模型进行运维路径规划,生成换电运维路径规划结果;
81.换电管理模块g:所述换电管理模块g用于根据所述换电运维路径规划结果进行助力车的换电管理。
82.进一步而言,系统还包括:
83.历史用车数据模块,历史用车数据模块用于采集助力车投放点的历史用车数据;
84.标识数据模块,标识数据模块用于对所述历史用车数据进行数据解析,根据数据解析结果生成投放点标识数据;
85.流量数据模块,流量数据模块用于根据所述投放点标识数据获得所述助力车投放点的时间窗口流通量数据;
86.匹配评价模块,匹配评价模块用于通过所述助力车实时数据进行所述助力车投放点的助力车与所述时间窗口流通量数据的匹配评价,生成匹配评价结果;
87.路径影响参数模块,路径影响参数模块用于根据所述匹配评价结果生成所述助力车投放点的路径影响参数;
88.路径规划调整模块,路径规划调整模块用于通过所述路径影响参数进行运维路径规划调整,获得调整换电运维路径规划结果,通过所述调整换电运维路径规划结果进行助力车的换电管理。
89.进一步而言,系统还包括:
90.数据集合模块,数据集合模块用于通过大数据构建路径影响参数训练数据集合;
91.增量学习模块,增量学习模块用于通过所述路径影响参数训练数据集合进行所述路径规划模型的增量学习,获得增量学习路径规划模型;
92.换电路径规划模块,换电路径规划模块用于将所述聚合规划结果、所述电池换电中心分布数据和所述路径影响参数输入所述增量学习路径规划模型,获得所述调整换电运维路径规划结果。
93.进一步而言,系统还包括:
94.实时数据模块,实时数据模块用于获得实时交通数据;
95.实时调整模块,实时调整模块用于根据所述实时交通数据进行所述换电运维路径规划结果的实时执行路径调整,获得实时调整结果;
96.实时调整结果模块,实时调整结果模块用于通过所述实时调整结果进行助力车的换电管理。
97.进一步而言,系统还包括:
98.行驶数据模块,行驶数据模块用于获得目标管控区域内的助力车行驶数据;
99.位置分布数据模块,位置分布数据模块用于设定标定时间阈值,通过所述标定时间阈值进行所述助力车行驶数据筛选,根据筛选结果获得标定助力车的位置分布数据;
100.优化聚合模块,优化聚合模块用于根据所述位置分布数据和所述投放点位置数据进行所述标定助力车的位置优化聚合,获得位置优化聚合结果;
101.路径优化模块,路径优化模块用于根据所述位置优化聚合结果进行所述换电运维路径规划结果的路径优化。
102.进一步而言,系统还包括:
103.运行数据模块,运行数据模块用于获得所述标定助力车的运行数据;
104.状态评价模块,状态评价模块用于根据所述运行数据对所述标定助力车进行状态评价,生成状态评价结果;
105.初检评价模块,初检评价模块用于获得运维人员的初检评价结果;
106.处理检修模块,处理检修模块用于根据所述状态评价结果和所述初检评价结果生成检修反馈参数,通过所述检修反馈参数进行所述标定助力车的检修处理。
107.进一步而言,系统还包括:
108.第一低电量助力车数据模块,第一低电量助力车数据模块用于根据所述助力车实时数据获得停车状态的停车助力车电量数据和位置分布,根据所述停车助力车电量数据和位置分布筛选获得第一低电量助力车数据;
109.运行助力车数据模块,运行助力车数据模块用于根据所述助力车实时数据获得运行状态的运行助力车电量数据和目的地数据;
110.第二低电量助力车数据模块,第二低电量助力车数据模块用于根据所述运行助力车电量数据和目的地数据进行耗电预估,基于耗电预估结果和所述目的地数据筛选获得第二低电量助力车数据;
111.低电量助力车数据模块,低电量助力车数据模块用于根据所述第一低电量助力车数据和所述第二低电量助力车数据获得所述低电量助力车数据。
112.本说明书通过前述对一种低电量助力车的换电规划方法的详细描述,本领域技术人员可以清楚的知道本实施例中一种低电量助力车的换电规划方法及系统,对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
113.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。