1.本发明涉及水利工程技术领域,尤其是指一种模拟船行波作用下污染物释放的环形水槽试验装置及方法。
背景技术:
2.航运是现代运输体系的重要组成部分,是人类活动影响河道水力状态最直接的表现。船行波是由船舶航行形成的对水体连续扰动的重力波,行进时船首排挤水体,使水体局部升起形成船首波,随着船体移动水体下降形成船尾波。船行波必然会对底泥造成扰动,使污染物在水土界面迁移,加剧水体恶化,对水环境产生不可逆的影响,当水流较缓、水深较浅时,这一影响更为显著。因此,开展船行波作用下底泥污染物释放特性的研究,对于准确认识内源污染的释放机理,提出切实可行的治理方式具有重要意义。
3.水槽模型试验作为室内研究水污染治理的重要手段之一,其能够有效模拟天然河道状态下泥沙运动特性及污染物迁移释放特性。由于环形水槽装置具有占地小、成本低、流动稳定时相当于无限长的直水槽等优点,因而被广泛应用于泥沙运动特性、水环境水污染治理研究的室内模型试验。利用环形水槽装置开展相关试验研究能够模拟无限长的天然河道,不仅可以合理控制多变的外部环境利于观察,还能够控制模型船不同吃水深度、航道、船间距、航速和航向(顺流、逆流),研究持续船行波作用对底泥中污染释放特性的影响规律。然而现有的环形水槽装置在进行模拟试验时主要采用改变水流速度来研究流速变化对污染物释放特性的影响,此方式模拟外力作用对底泥扰动的模型过于理想,其仅仅考虑天然水力条件,未将人类活动尤其是通航作用对水体的扰动纳入考虑,因而不能准确反应实际情况;而且现有的环形水槽试验装置多用于模拟水动力条件对地泥污染物释放的影响,缺少模拟航道通航或双航道耦合船行波持续作用下对底泥中污染物分层释放特性的影响。
技术实现要素:
4.为此,本发明所要解决的技术问题在于克服现有技术存在的问题,提出一种模拟船行波作用下污染物释放的环形水槽试验装置及方法,其可用于模拟单航道与双航道耦合船行波持续作用下对底泥中污染物分层释放特性的影响。
5.为解决上述技术问题,本发明提供一种模拟船行波作用下污染物释放的环形水槽试验装置,包括:水槽主体,其内设有用于模拟模型船航行的水体和底泥试样;牵引杆,其一端连接所述模型船;水体驱动组件,其包括螺旋桨,所述螺旋桨置于所述水槽主体的水体中,通过螺旋桨获得稳定水流以模拟天然河道状态;第一驱动模块,其包括第一驱动源、第一传动轴、第一支撑平台和第一连接构件,所述第一驱动源通过所述第一传动轴连接所述第一支撑平台,所述第一支撑平台上设置有至少一个第一连接构件,所述第一连接构件连接所述牵引杆,且第一支撑平台位于第一连
接构件的中心位置;第二驱动模块,其包括第二驱动源、第二传动轴、第二支撑平台和第二连接构件,所述第二驱动源通过所述第二传动轴连接所述第二支撑平台,所述第二支撑平台上设置有至少一个第二连接构件,所述第二连接构件连接所述牵引杆,且第二支撑平台位于第二连接构件的中心位置;其中,所述第一驱动模块和所述第二驱动模块独立运行,通过改变所述第一驱动模块和所述第二驱动模块的工作状态,以模拟单航道工况或双航道工况。
6.在本发明的一个实施例中,当所述第一驱动模块和所述第二驱动模块均处于工作状态时,用于模拟双航道工况;当所述第一驱动模块或第二驱动模块处于工作状态时,用于模拟单航道工况。
7.在本发明的一个实施例中,所述水槽主体包括圆心重合的水槽内筒和水槽外筒,所述水槽内筒和所述水槽外筒之间构成用于模拟模型船航行的区域。
8.在本发明的一个实施例中,所述水槽外筒的外侧在不同的高度位置设置取样口,以用于采集不同深度水样。
9.在本发明的一个实施例中,所述水体驱动组件还包括升降平台、第三驱动源和第三传动轴,所述升降平台上设置有第三驱动源,所述第三驱动源通过第三传动轴连接所述螺旋桨。
10.在本发明的一个实施例中,还包括流速仪,所述流速仪悬挂置于所述水槽主体的水体中。
11.在本发明的一个实施例中,所述牵引杆上设置有刻度,通过刻度调节所述牵引杆下水的深度,以用于改变所述模型船的吃水深度。
12.在本发明的一个实施例中,还包括电机编码控制器,所述电机编码控制器用于控制第一驱动源和/或第二驱动源的转向和转速,以实现对所述模型船航向和航速的控制。
13.在本发明的一个实施例中,所述第一驱动源和所述第二驱动源均为旋转电机。
14.此外,本发明还提供一种模拟船行波作用下污染物释放的环形水槽试验方法,该方法通过如上述所述的模拟船行波作用下污染物释放的环形水槽试验装置实现,方法包括:步骤一:在水槽主体内加入底泥试样,并加入原位水体,静置预设时间后恢复层理结构,通过采样口采集不同深度水样;步骤二:启动螺旋桨扰动水体模拟天然水流状态,待稳定后采集不同深度水样;步骤三:启动螺旋桨扰动水体,同时启动第一驱动源或第二驱动源用于模拟单航道工况,待稳定后采集不同深度水样,其中,模拟单航道工况包括通过旋转电机调节模型船的航向和航速、通过牵引杆调节模型船的吃水深度,以及通过调节连接构件的间距模拟不同船距;步骤四:启动螺旋桨扰动水体,同时启动第一驱动源和第二驱动源用于模拟双航道工况,待稳定后采集不同深度水样,其中,模拟双航道工况包括通过旋转电机调节模型船的航向和航速、通过牵引杆调节模型船的吃水深度,以及通过调节连接构件的间距模拟不同船距;步骤五:分析步骤一至步骤四采集的水样,以评估船行波与水体流速对污染物释
放的影响规律。
15.本发明的上述技术方案相比现有技术具有以下优点:本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验装置及方法,其使用螺旋桨获得稳定水流,以模拟天然河道状态,即将人类活动尤其是通航作用对水体的扰动考虑在内,因而能够准确的反应实际情况,而且可用于模拟单航道和双航道耦合船行波持续作用下对底泥中污染物分层释放特性的影响,可操作性强。
附图说明
16.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
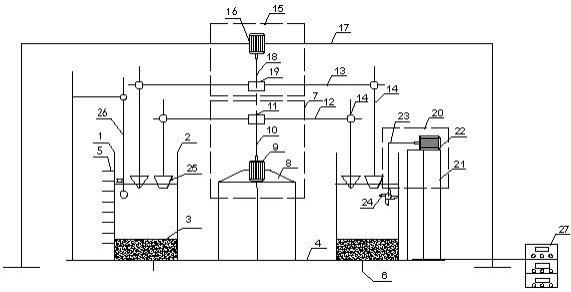
17.图1为本发明实施例所提出的一种模拟船行波作用下污染物释放的环形水槽试验装置的结构示意图。
18.图2为本发明单航道作用工况图。
19.图3为本发明不同船间距作用工况图。
20.图4为本发明双航道作用工况图。
21.其中,附图标记说明如下:1、水槽外筒;2、水槽内筒;3、底泥试样;4、底座;5、取样口;6、排水口;7、第一驱动模块、8、支座;9、第一驱动源;10、第一传动轴;11、第一支撑平台;12、第一连接构件;13、第二连接构件;14、牵引杆;15、第二驱动模块;16、第二驱动源;17、支架;18、第二传动轴;19、第二支撑平台;20、水体驱动组件;21、升降平台;22、第三驱动源;23、第三传动轴;24、螺旋桨;25、模型船;26、流速仪;27、电机编码控制器;28、虹吸装置。
具体实施方式
22.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
23.请参考图1所示,本发明实施例提供的一种模拟船行波作用下污染物释放的环形水槽试验装置,包括底座4、支座8、支架17、水槽主体、牵引杆14、水体驱动组件20、第一驱动模块7和第二驱动模块15,水槽主体设于底座4上,水槽主体内设有用于模拟模型船25航行的水体和底泥试样3;水体驱动组件20包括螺旋桨24,所述螺旋桨24置于所述水槽主体的水体中,通过螺旋桨24获得稳定水流以模拟天然河道状态;牵引杆14的一端连接所述模型船25;第一驱动模块7设于支座8上,第一驱动模块7包括第一驱动源9、第一传动轴10、第一支撑平台11和第一连接构件12,所述第一驱动源9通过所述第一传动轴10连接所述第一支撑平台11,所述第一支撑平台11上设置有至少一个第一连接构件12,所述第一连接构件12连接所述牵引杆14,且第一支撑平台11位于第一连接构件12的中心位置;第二驱动模块15设于支架17上,第二驱动模块15包括第二驱动源16、第二传动轴18、第二支撑平台19和第二连接构件13,所述第二驱动源16通过所述第二传动轴18连接所述第二支撑平台19,所述第二支撑平台19上设置有至少一个第二连接构件13,所述第二连接构件13连接所述牵引杆14,且第二支撑平台19位于第二连接构件13的中心位置。其中,所述第一驱动模块7和所述第二驱动模块15独立运行,通过改变所述第一驱动模块7和所述第二驱动模块15的工作状态,以模拟单航道工况或双航道工况。
24.当所述第一驱动模块7和所述第二驱动模块15均处于工作状态时,用于模拟双航道工况,如图4所示;当所述第一驱动模块7或第二驱动模块15处于工作状态时,用于模拟单航道工况,如图2和图3所示。
25.本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验装置,其使用螺旋桨24获得稳定水流,以模拟天然河道状态,即将人类活动尤其是通航作用对水体的扰动考虑在内,因而能够准确的反应实际情况,而且可用于模拟双航道耦合船行波持续作用下对底泥中污染物分层释放特性的影响,可操作性强。
26.上述所述水槽主体包括圆心重合的水槽内筒2和水槽外筒1,所述水槽内筒2和所述水槽外筒1之间构成用于模拟模型船25航行的区域。作为示例地,水槽主体的材料为有机玻璃,如此能够便于观察底泥与水动力状态;且有机玻璃具有足够刚度,在制样及试验过程中不会磕碰损坏;在有机玻璃的水槽外筒1的外侧4cm、8cm、14cm、17cm、20cm、25cm、30cm处设置取样口5,便于试验过程中采集不同深度水样。水槽主体的底部设置排水口6。
27.进一步地,可以采用虹吸装置28向水槽主体中装入、移除上覆水体,以减少操作过程对试验底泥的扰动。
28.上述所述水体驱动组件20还包括升降平台21、第三驱动源22和第三传动轴23,所述升降平台21上设置有第三驱动源22,所述第三驱动源22通过第三传动轴23连接所述螺旋桨24,所述螺旋桨24置于所述水槽主体的水体中,通过螺旋桨24获得稳定水流以模拟天然河道状态。
29.本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验装置还包括流速仪26,所述流速仪26悬挂置于所述水槽主体的水体中,作为优选地,流速仪26可以是光电式流速仪26,采用光电式流速仪26采集水体的流速。
30.上述所述牵引杆14上设置有刻度,通过刻度调节所述牵引杆14下水的深度,以用于改变所述模型船25的吃水深度。
31.本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验装置还包括电机编码控制器27,所述电机编码控制器27用于控制第一驱动源9和/或第二驱动源16的转向和转速,以实现对所述模型船25航向和航速的控制。作为示例地,电机编码控制器27的控制精度为0.01转/min,由上、中、下三个调节单元组成,上部调节单元为第二驱动源16(优选旋转电机)控制系统,中部调节单元为第一驱动源9(优选旋转电机)控制系统,通过控制旋转电机的转动方向及转速带动牵引杆14,从而获得不同航向及航度产生的船行波。下部调节单元为第三驱动源22控制系统,通过控制第三驱动源22的转速获得不同流速的水流。该装置靠取样口5区域布置有钢架,光电式流速仪26通过可活动联接固定在钢架上,光电式流速仪26结合水体驱动组件20用于测量并控制试验过程的水体流速。
32.本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验装置在实际工作时,首先将采集的河道黑臭底泥装入水槽主体中,并用虹吸装置28缓慢加入原位水体,静置48小时以模拟原位状态,通过取样口5采集水体上中下三个部位水样。然后启动螺旋桨24模拟天然状态下的水体流速,稳定一段时间后于相同部位取水样,研究流速对底泥污染物分层释放特性的影响,以上过程为一次工况试验。通过调节第一连接构件12(优选钢构件)的间距调节模型船25的间距,研究不同船间距条件下船行波对污染物释放的影响规律,如图3所示;通过电机编码控制器27调节第一驱动源9的转速,研究不同航速下船行波对污染
物分层释放特性的影响规律;调节第一驱动源9反转,研究不同航行方向(顺流、逆流)下船行波对污染物释放的影响规律;调节带刻度的牵引杆14,研究不同吃水深度下船行波对污染物释放的影响规律;通过启动第二驱动源16,调节带刻度的牵引杆14,研究双航道不同航行模式作用下耦合船行波对污染物释放的影响规律,如图4所示。通过测试分层水样中污染物浓度,水体浊度、流速,航速,航道,船间距等参数,掌握不同工况下污染物分层释放模式;通过比较不同工况,不同深度污染物浓度,评估船行波与水体流速对污染物释放的影响规律。
33.下面对本发明实施例公开的一种模拟船行波作用下污染物释放的环形水槽试验方法进行介绍,下文描述的一种模拟船行波作用下污染物释放的环形水槽试验方法与上文描述的一种模拟船行波作用下污染物释放的环形水槽试验装置可相互对应参照。
34.本发明实施例还提供了一种模拟船行波作用下污染物释放的环形水槽试验方法,该方法通过如上述所述的模拟船行波作用下污染物释放的环形水槽试验装置实现,方法包括:步骤一:在水槽主体内加入底泥试样3,并加入原位水体,静置预设时间后恢复层理结构,通过采样口采集不同深度水样;步骤二:启动第三驱动源22,通过螺旋桨24扰动水体模拟天然水流状态,待稳定后采集不同深度水样;步骤三:启动第三驱动源22,通过螺旋桨24扰动水体,同时启动第一驱动源9或第二驱动源16用于模拟单航道工况,待稳定后采集不同深度水样,其中,模拟单航道工况包括通过旋转电机调节模型船25的航向和航速、通过牵引杆14调节模型船25的吃水深度,以及通过调节连接构件的间距模拟不同船距;步骤四:启动第三驱动源22,通过螺旋桨24扰动水体,同时启动第一驱动源9和第二驱动源16用于模拟双航道工况,待稳定后采集不同深度水样,其中,模拟双航道工况包括通过旋转电机调节模型船25的航向和航速、通过牵引杆14调节模型船25的吃水深度,以及通过调节连接构件的间距模拟不同船距;步骤五:分析步骤一至步骤四采集的水样,以评估船行波与水体流速对污染物释放的影响规律。
35.本发明所述的一种模拟船行波作用下污染物释放的环形水槽试验方法,其使用螺旋桨24获得稳定水流,以模拟天然河道状态,即将人类活动尤其是通航作用对水体的扰动考虑在内,因而能够准确的反应实际情况,而且可用于模拟双航道耦合船行波持续作用下对底泥中污染物分层释放特性的影响,可操作性强。
36.具体地,本发明实施例提供的一种模拟船行波作用下污染物释放的环形水槽试验方法包括:(1)首先将采集的底泥试样3装入水槽主体中,并通过虹吸装置28缓慢加入原位水样,静置48h后模拟天然河道状态;(2)试验开始前通过取样口5采集水体上中下三个部位水样,得到上覆水体的初始污染物浓度;(3) 调节升降平台21控制螺旋桨24入水深度,打开第三驱动源22,通过第三传动轴23使螺旋桨24匀速转动,获得稳定的水流,模拟河道水流,并通过固定在钢架上的光电式流速仪26测量水体流速,通过电机编码控制器27调节第三驱动源22的转速,以获得试验所需水流,待水流稳定后于取样口5相同位置采集水样;(4)关闭第三驱动源22,调节带刻度的牵引杆14并通过可活动联接与钢构件固定,使模型船25处于
试验设定的航道、航向与吃水深度;(5)启动第一驱动源9,通过第一传动轴10、第一支撑平台11和第一连接构件12将牵引力传递给模型船25;采用电机编码控制器27调节第一驱动源9的转速,以控制模型船25的航速,稳定后采集水样;(6)转动带刻度的牵引杆14,改变模型船25的方向;同时通过电机编码控制器27使第一驱动源9反转,其余操作重复步骤(5),研究逆流航行船行波对污染物释放的影响;(7)调节固定于第一支撑平台11上的第一连接构件12的间距,其余操作重复步骤(5),研究不同船间距船行波对污染物释放的影响;(8)通过启动第二驱动源16,调节带刻度的牵引杆14,研究双航道不同航行模式作用下耦合船行波对污染物释放的影响规律。通过测试分层水样中污染物浓度,水体浊度、流速,航速,航道,船间距等参数,掌握不同工况下污染物分层释放模式;通过比较不同工况,不同深度污染物浓度,评估船行波与水体流速对污染物释放的影响规律。
37.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。