1.本发明涉及机器人技术领域,尤其涉及一种跳跃滚动式六杆张拉整体机器人。
背景技术:
2.随着移动机器人技术的推进和发展,为了满足在灾害搜救、环境探测以及太空探索等复杂地形环境下日益增长的紧迫任务,移动机器人需要具备更强的地形适应能力、高效运动模式以及自主运动能力。随着移动机器人的小型化趋势,地形环境对机器人运动的限制也越来越大:轮式或履带式救援机器人很难越过尺寸数倍于自身的障碍物,虽然爬行机器人翻越障碍物的能力相对较强,但其结构较复杂,大量的驱动部件使得机构和控制系统都很复杂,从而限制了其实际的应用。而跳跃机器人一般具有结构简单可靠、机动性好、可轻易越过数倍于自身尺寸障碍物的特点,因此跳跃机器人的活动范围更广,环境适应能力更强,更适合应用于环境侦查探测等方面。
3.为此,张拉整体机器人近年来在机器人领域引起了众多学者的研究兴趣;通过驱动张拉整体结构的杆或绳能够使其按照一定规律运动,并且将张拉整体结构应用在机器人上有众多超越传统机器人人的优势:由于结构内部没有刚性连接,因此也没有杠杆臂来放大力,面对载荷、碰撞时能够根据拓扑结构重新分布力,避免应力集中保证结构不被破坏;结构高冗余度,保证单一构件损坏时,整体结构依然有效,具有良好的容错能力;没有弯曲或剪力允许高效使用材料,使得系统是轻盈且鲁棒的;除此之外,由于其本身是可折叠的,因此还具有节省空间的特性。众多优势使得张拉整体机器人具有重要的研究意义。
4.然而,目前大部分张拉整体机器人仅能实现滚动运动这一种移动方式,导致机器人克服大尺寸障碍物的能力有限。因此研发兼具滚动功能和高效弹跳功能的张拉整体机器人可以显著提高机器人的运动能力和环境适应能力,具有较强的必要性。
5.因此,现有技术还有待于改进和发展。
技术实现要素:
6.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种跳跃滚动式六杆张拉整体机器人及其控制方法,旨在提升机器人的越障能力。
7.本发明解决技术问题所采用的技术方案如下:一种跳跃滚动式六杆张拉整体机器人,其包括三个刚性杆件组和24个弹性索,每个刚性杆件组均包括相互平行的两个刚性杆件,每个刚性杆件的两个端点均引出四个弹性索,每个端点对应的四个弹性索分别与距离其最近的四个端点相连接,其中,所述刚性杆件包括:杆件本体,与所述弹性索连接,并具有中心孔;两个顶持装置,分布于所述杆件本体的两端,且至少部分位于所述中心孔内;主控装置,设置于所述中心孔内,并分别与两个顶持装置连接;所述主控装置用于控制所述顶持装置部分伸出所述中心孔外以顶持地面,或完全回缩至所述中心孔内。
8.所述跳跃滚动式六杆张拉整体机器人,其中,所述顶持装置包括:套筒,与所述中心孔间隙配合;记忆合金弹簧,位于所述套筒内,并与所述主控装置连接;所述记忆合金弹簧的外端部与所述套筒连接;当所述记忆合金弹簧伸长时,所述套筒部分伸出所述中心孔外并顶持地面。
9.所述跳跃滚动式六杆张拉整体机器人,其中,所述主控装置包括:微控制器,设置于所述中心孔内;两个电子开关,设置于所述中心孔内,并分别朝向所述杆件本体的两端;两个电子开关分别与两个顶持装置一一对应连接,并均与所述微控制器连接。
10.所述跳跃滚动式六杆张拉整体机器人,其中,所述杆件本体的两端均设置有感应装置,所述感应装置与所述主控装置连接,并用于触地时向所述主控装置发送感应信号。
11.一种跳跃滚动式六杆张拉整体机器人的控制方法,其中,所述控制方法包括如下步骤:主控装置接收操作指令,并获取操作指令携带的运动类型和目标点坐标;其中,所述运动类型包括跳跃运动和滚动运动;当所述运动类型为跳跃运动时,判断机器人当前触地的三个端点中是否存在两个端点属于同一个刚性杆件组;若是,则继续判断目标点相对于机器人的方位;其中,所述方位包括侧前方和正前方;当目标点处于机器人的侧前方时,控制机器人执行若干个单次倾斜跳跃运动,直至目标点处于机器人的正前方;控制机器人执行若干个单次直线跳跃运动,并在每个单次直线跳跃运动后获取机器人的质心坐标,直至质心坐标与所述目标点坐标重合。
12.所述控制方法,其中,所述判断目标点相对于机器人的方位具体为:计算并判断所述两个端点与目标点之间的距离是否相等;当相等时,目标点处于机器人的正前方;当不相等时,目标点处于机器人的侧前方。
13.所述控制方法,其中,所述控制机器人执行若干个单次倾斜跳跃运动,直至目标点处于机器人的正前方具体包括:比较所述两个端点与目标点之间的距离;控制所述两个端点对应的顶持装置伸出,且距离目标点较近的端点对应的顶持装置伸出的长度小于距离目标点较远的端点对应的顶持装置伸出的长度;当机器人脱离地面后,控制两个顶持装置回缩,直至机器人触地,一个单次倾斜跳跃运动执行完成;继续执行若干个单次倾斜跳跃运动,直至所述两个端点与目标点之间的距离相等。
14.所述控制方法,其中,控制机器人执行若干个单次直线跳跃运动具体包括:控制所述两个端点对应的顶持装置伸出,且两个顶持装置伸出的长度相等;当机器人脱离地面后,控制两个顶持装置回缩,直至机器人触地,一个单次直线跳
跃运动执行完成。
15.所述控制方法,其还包括步骤:当所述运动类型为滚动运动时,根据最短路径原则从触地三角形的三条边中选取滚动边;以所述滚动边对应的端点为驱动端点,控制机器人执行一个单次滚动运动;获取机器人的质心坐标,并判断质心坐标与目标点坐标是否重合;当不重合时,控制机器人继续执行若干个单次滚动运动,直至质心坐标与目标点坐标重合。
16.所述控制方法,其中,所述以所述滚动边对应的端点为驱动端点,控制机器人执行一个单次滚动运动具体包括:以所述滚动边对应的端点为驱动端点,控制所述驱动端点对应的顶持装置伸出并顶持地面;所述顶持装置脱离地面后,控制所述顶持装置回缩,直至三个端点同时触地,一个单次滚动运动执行完成。
17.有益效果:本发明中通过所述主控装置控制对应的顶持装置伸出,即可实现机器人的滚动运动/跳跃运动;相比于现有技术,本发明所述跳跃滚动式六杆张拉整体机器人既可以实现滚动运动,又可以实现跳跃运动;当遇到障碍物时可以通过所述主控装置控制机器人采用跳跃运动进行越障,大大的提升了机器人的越障能力。
附图说明
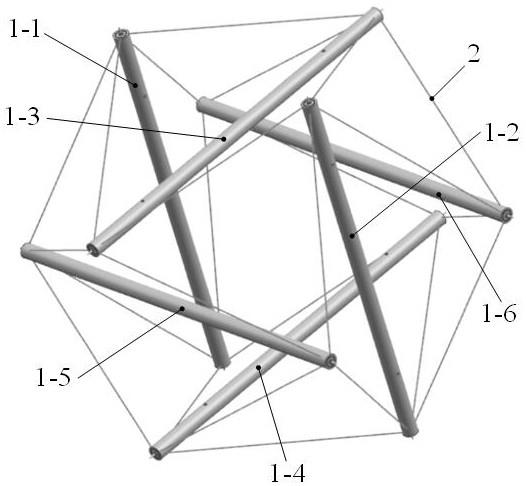
18.图1是本发明中所述跳跃滚动式六杆张拉整体机器人的第一视图;图2是本发明中所述跳跃滚动式六杆张拉整体机器人的第二视图;图3是本发明中所述刚性杆件的内部结构示意图;图4是本发明中机器人当前触地三角形
△
abc为to类型时的第一状态示意图;图5是本发明中机器人当前触地三角形
△
abc为to类型,且以ab边为滚动边、以c点为驱动端点执行一个单次滚动运动时的状态示意图;图6是本发明中机器人当前触地三角形
△
abc为to类型,且以ab边为滚动边、以c点为驱动端点执行一个单次滚动运动完成后的状态示意图;图7是本发明中机器人当前触地三角形
△
abc为to类型,且以ac边为滚动边、以b点为驱动端点执行一个单次滚动运动时的状态示意图;图8是本发明中机器人当前触地三角形
△
abc为to类型,且以ac边为滚动边、以b点为驱动端点执行一个单次滚动运动完成后的状态示意图;图9是本发明中机器人当前触地三角形
△
abc为tc类型时的状态示意图;图10是本发明中机器人当前触地三角形
△
abc为tc类型,且以ab边为滚动边、以c点为驱动端点执行一个单次滚动运动时的状态示意图;图11是本发明中机器人当前触地三角形
△
abc为tc类型,且以ab边为滚动边、以c点为驱动端点执行一个单次滚动运动完成后的状态示意图;图12是本发明中机器人当前触地三角形
△
abc为to类型时的第二状态示意图;图13是本发明中机器人当前触地三角形
△
abc为to类型,并执行一个单次跳跃运
动时的状态示意图;图14是本发明中机器人执行一个单次倾斜跳跃运动完成后,机器人的质心位置变化示意图;图15是本发明中机器人执行一个单次直线跳跃运动完成后,机器人的质心位置变化示意图;图16是本发明中所述跳跃滚动式六杆张拉整体机器人的功能原理框图;图17是本发明中所述跳跃滚动式六杆张拉整体机器人的控制方法的流程图;图18是本发明中机器人与目标点之间的相对方位关系。
具体实施方式
19.为使本发明的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.本发明提供一种跳跃滚动式六杆张拉整体机器人,如图1-图3所示,所述跳跃滚动式六杆张拉整体机器人包括三个刚性杆件组和24个弹性索2,每个刚性杆件组均包括相互平行的两个刚性杆件,即,共有6个刚性杆件,且两两构成一个刚性杆件组(如图1中所示,刚性杆件1-1和1-2属于同一个刚性杆件组,刚性杆件1-3和1-4属于同一个刚性杆件组,刚性杆件1-5和1-6属于同一个刚性杆件组);任意两个刚性杆件组均相互垂直。每个刚性杆件均沿长度方向具有两个端点,每个端点均引出四个弹性索2,且每个端点对应的四个弹性索2分别与距离其最近的四个端点相连接。其中,属于同一个刚性杆件组的两个刚性杆件中,任意两个端点均未通过弹性索2连接。
21.所述跳跃滚动式六杆张拉整体机器人属于二十四面体结构,其表面均为三角形;且当机器人放置于地面时,存在三个端点同时触地。
22.所述刚性杆件包括:杆件本体3、两个顶持装置4、以及主控装置5。所述杆件本体3的端部与所述弹性索2固定连接,使得当机器人运动时,如图7和图13所示,所述弹性索2与所述杆件本体3的连接点位置不变,保证机器人整体结构不会发生较大改变,保持机器人的基本外观形状,从而避免因运动过程中发生较大形变而导致落地后不平稳易滚动的现象产生。
23.所述杆件本体3为圆柱形,且所述杆件本体3具有中心孔,所述中心孔沿所述杆件本体3的轴向贯穿布置。两个顶持装置4分别布置于所述杆件本体3的两端,且对于每个顶持装置4,均至少部分位于所述中心孔内。
24.所述主控装置5设置于所述中心孔内,且位于两个顶持装置4之间;所述主控装置5分别与两个顶持装置4连接。所述主控装置5用于控制所述顶持装置4部分伸出所述中心孔外以顶持地面,或完全回缩至所述中心孔内。具体的,所述主控装置5对每个顶持装置4的控制均是独立的,且当所有顶持装置4均回缩至所述中心孔内时,机器人处于触地且静止的状态;当所述主控装置5控制触地的三个端点中任意一个端点对应的顶持装置4伸出中心孔外并顶持地面时,机器人即可朝向与该端点相对的方向滚动;在滚动过程中,当该顶持装置4脱离地面时,所述主控装置5控制该顶持装置4完全回缩至中心孔内,直至再次有三个端点同时触地,一个单次滚动运动执行完成,且本次触地的三个端点与上次触地的三个端点中
存在两个端点重合。同理,机器人连续执行若干个单次滚动运动即可实现连续滚动。
25.当机器人触地的三个端点中存在两个端点属于同一个刚性杆件组时,所述主控装置5控制所述两个端点对应的顶持装置4伸出至中心孔外并顶持地面,则机器人执行跳跃运动;跳跃过程中,当所述两个端点对应的顶持装置4脱离地面时,所述主控装置5控制该两个顶持装置4完全回缩至中心孔内,直至所述三个端点再次触地,一个单次跳跃运动执行完成。同理,机器人连续执行若干个单次跳跃运动即可实现连续跳跃。
26.可见,本发明中通过所述主控装置5控制对应的顶持装置4伸出,即可实现机器人的滚动运动/跳跃运动;相比于现有技术,本发明所述跳跃滚动式六杆张拉整体机器人既可以实现滚动运动,又可以实现跳跃运动;当遇到障碍物时可以通过所述主控装置5控制机器人采用跳跃运动进行越障,大大的提升了机器人的越障能力。
27.如图3所示,所述顶持装置4包括套筒41和记忆合金弹簧42;所述记忆合金弹簧42的弹性形变方向与所述杆件本体3的轴向重合;所述记忆合金弹簧42位于所述套筒41内,且所述记忆合金弹簧42的一端与所述主控装置5连接,另一端向外布置,并与所述套筒41连接;所述套筒41与所述中心孔间隙配合。
28.当所述主控装置5为所述记忆合金弹簧42供电时,所述记忆合金弹簧42在通电状态下可以受热达到相变温度并迅速伸长,从而对套筒41产生推力,以推动所述套筒41部分沿所述杆件本体3的轴向伸出中心孔外并顶持地面(如图7和图13所示);当所述记忆合金弹簧42断电时,其温度降至相变温度以下,且长度恢复至原长,所述套筒41和所述记忆合金弹簧42沿所述杆件本体3的轴向整体完全回缩至中心孔内,且所述套筒41无法触地。
29.所述杆件本体3的两端均设置有感应装置9,所述感应装置9与所述主控装置5连接,并用于触地时向所述主控装置5发送感应信号。具体的,两个感应装置9沿所述杆件本体3的轴向依次排列设置于所述杆件本体3的两端,以保证无论所述杆件本体3的哪个端点触地,该端点对应的感应装置9必然触地,且向所述主控装置5发送感应信号。所述主控装置5通过接收的感应信号,即可判断机器人触地,并判断机器人触地的端点。
30.如图3所示,所述套筒41沿轴向的外端设置有顶尖结构6,所述顶尖结构6为锥形,且顶尖结构6的大直径端与所述套筒41连接;当机器人触地,且触地端点对应的记忆合金弹簧42处于断电状态时,触地端点对应的顶尖结构6和感应装置9均触地,使得杆件本体3、顶尖结构6与地面之间合围成三角形形状,提升机器人触地的稳定性,避免机器人滚动触地或跳跃触地后因惯性继续产生滚动或弹跳。
31.如图3所示,所述中心孔内对应每个记忆合金弹簧42处均设置有限位凸台7,即每个杆件本体3的中心孔内均设置有两个限位凸台7,且两个限位凸台7与两个记忆合金弹簧42一一对应。具体的,所述限位凸台7位于所述记忆合金弹簧42沿周向远离所述套筒41的一端,并与所述记忆合金弹簧42连接,从而对所述记忆合金弹簧42进行定位和限位,以保证所述记忆合金弹簧42断电后可以回缩至原位,且再次充电后可以将所述套筒41顶出至中心孔外。
32.本发明中一实施例,所述感应装置9包括薄膜压力传感器。
33.本发明中一实施例,所述套筒41与所述杆件本体3的端面平齐,以保证所述电子开关52开启时,对应的记忆合金弹簧42沿轴向远离所述限位凸台7的一端向外伸长,所述套筒41必然可以被所述记忆合金弹簧42顶出中心孔外并顶持地面。
34.所述主控装置5包括微控制器51和两个电子开关52;所述微控制器51设置于所述中心孔内;两个电子开关52均设置于所述中心孔内,并分别朝向所述杆件本体3的两端布置。两个电子开关52与两个顶持装置4一一对应连接,且两个电子开关52均与所述微控制器51连接,以通过所述微控制器51控制两个电子开关52的开启和关闭,来实现两个顶持装置4的伸出和回缩。
35.具体的,如图16所示,所述电子开关52分别与微控制器51、以及对应的记忆合金弹簧42连接;当所述微控制器51控制所述电子开关52开启时,与其连接的记忆合金弹簧42伸长,并推动所述套筒41部分伸出中心孔外并顶持地面,从而通过所述套筒41将所述杆件本体3相对应的端点推离地面,使机器人受到滚动力矩;当属于同一个刚性杆件组的两个端点同时被推离地面时,机器人则受到跳跃力矩。当所述电子开关52关闭时,与其连接的记忆合金弹簧42的温度下降,并下降至相变温度以下,记忆合金弹簧42的长度逐渐恢复至原长,则所述套筒41回缩至中心孔内。
36.所述中心孔内还设置有电源8,如图3和图16所示,所述电源8与所述微控制器51连接,从而为所述微控制器51供电。
37.所述限位凸台7为圆环形,所述限位凸台7的中心孔用于供连接线穿过;其中,所述连接线的两端分别与所述记忆合金弹簧42和所述电子开关52连接。
38.基于上述跳跃滚动式六杆张拉整体机器人,本发明还提供一种跳跃滚动式六杆张拉整体机器人的控制方法,如图17所示,所述控制方法包括如下步骤:s100、主控装置接收操作指令,并获取操作指令携带的运动类型和目标点坐标;其中,所述运动类型包括跳跃运动和滚动运动;本发明还提供一指令输入端口,指令输入端口与所述主控装置5连接,以向所述主控装置5发送用户输入的操作指令;具体的,指令输入端口与所述微控制器51连接。所述操作指令包括运动类型和目标点坐标,具体的,所述运动类型包括跳跃运动和滚动运动;所述目标点坐标为包括x轴坐标、y轴坐标和z轴坐标的三维坐标。
39.所述主控装置5接收到用户输入的操作指令后,获取用户希望机器人执行的运动的运动类型、以及运动后到达的目标点坐标,即用户希望机器人以跳跃式运动至目标点,或是以滚动式移动至目标点。
40.s200、当所述运动类型为跳跃运动时,判断机器人当前触地的三个端点中是否存在两个端点属于同一个刚性杆件组;本发明采用现有的运动捕捉系统来获取每个杆件本体3的两个端点的坐标(三维坐标);具体的,所述主控装置5与运动捕捉系统无线连接,并在每个杆件本体3的两端粘贴标记贴,所述标记贴用于起标识作用,以利于运动捕捉系统捕获杆件本体3的端点位置,从而在运动捕捉系统的环境下,机器人通过与运动捕捉系统通信,从而获得每个杆件本体3的端点的坐标,并可根据每个杆件本体3的端点的坐标计算得出机器人的质心坐标。
41.当所述主控装置5判断所述操作指令携带的运动类型为跳跃运动时,判断机器人当前触地三角形的类型;其中,机器人触地三角形的状态包括to类型(如图4和图12所示)和tc类型(如图9所示),to类型表示触地三角形为开放式三角形,即触地的三个端点中存在两个端点属于同一个刚性杆件组;tc类型表示触地三角形为封闭式三角形,即触地的三个端点分别属于三个不同的刚性杆件组;只有当机器人当前触地三角形的类型为to类型时,机
器人才会执行跳跃运动。
42.s300、若是,则判断目标点相对于机器人的方位;其中,所述方位包括侧前方和正前方;所述主控装置5还需判断目标点与机器人之间的相对方位关系,其中,所述方位包括正前方和侧前方,即目标点位于机器人的正前方或位于机器人的侧前方。
43.需要说明的是,本发明中所述的目标点为机器人若干个单次执行跳跃运动或若干个单次滚动运动后,机器人的质心必然能够达到的点;且,当机器人执行跳跃运动时,目标点需满足:目标点位于机器人的前方(正前方或侧前方)。如图18所示,对目标点位于机器人的前方的定义为:机器人触地的三个端点a、b、c中,a端点和b端点属于同一个刚性杆件组,目标点e位于触地三角形
△
abc中ab边所处直线靠近c端点的一侧。
44.具体的,所述步骤s300中判断目标点相对于机器人的方位具体为:s301、根据所述两个端点的坐标、以及目标点的坐标,分别计算所述两个端点与目标点之间的距离,并判断所述两个端点与目标点之间的距离是否相等;s302、当相等时,目标点处于机器人的正前方;s303、当不相等时,目标点处于机器人的侧前方。
45.s400、当目标点处于机器人的侧前方时,控制机器人执行若干个单次倾斜跳跃运动,直至目标点处于机器人的正前方;当目标点处于机器人的侧前方时,则控制机器人执行倾斜跳跃运动,以改变机器人与目标点之间的相对方位关系,达到目标点处于机器人的正前方的目的。具体为,控制机器人执行一个单次倾斜跳跃运动,并在单次跳跃运动完成后重新计算目标点与机器人之间的相对方位关系,若目标点依旧处于机器人的侧前方,则控制机器人继续执行一个单次跳跃运动,并依此循环,直至所述两个端点与目标点之间的距离相等,则目标点处于机器人的正前方。
46.所述步骤s400中控制机器人执行若干个单次倾斜跳跃运动,直至目标点处于机器人的正前方具体包括:s401、比较所述两个端点与目标点之间的距离;s402、控制所述两个端点对应的顶持装置伸出,且距离目标点较近的端点对应的顶持装置伸出的长度小于距离目标点较远的端点对应的顶持装置伸出的长度;具体的,当机器人执行单次倾斜跳跃运动时,与所述两个端点对应的电子开关52均开启,所述两个端点对应的套筒41均需伸出中心孔外并顶持地面,且与所述两个端点对应的记忆合金弹簧42获取的电流参数之间具有差异。本发明中一实施例,所述电流参数为电压,获取电压小的记忆合金弹簧42伸出的长度小,获取电压大的记忆合金弹簧42伸出的长度大,机器人会在跳跃过程中朝向伸出长度小的记忆合金弹簧42一侧倾斜。
47.由于所述两个端点与目标点之间的距离不相等,因此,所述两个端点中必然存在其中一个端点距离目标点较近,另一个端点距离目标点较远;其中,距离目标点较近的端点对应的记忆合金弹簧42获取的电压小于距离目标点较远的端点对应的记忆合金弹簧42获取的电压,使得机器人在跳跃过程中朝向距离目标点较近的端点方向倾斜,从而实现机器人的一个单次倾斜跳跃运动。
48.需说明的是,如图12和图13所示,当机器人执行跳跃运动时,每次触地的三个端点
均不变(图13中箭头表示机器人相对地面跳跃方向);当机器人执行一个单次跳跃运动完成后,机器人的状态如图12所示。
49.s403、当机器人脱离地面后,控制两个顶持装置回缩,直至机器人触地,一个单次倾斜跳跃运动执行完成;当机器人脱离地面后,尤其指所述两个端点对应的套筒41均脱离地面后,所述主控装置5控制两个电子开关52关闭,两个记忆合金弹簧42恢复原长,则对应的两个套筒41均回缩至中心孔内,避免套筒41对机器人的落地产生不良干涉。当机器人再次触地,则一个单次倾斜跳跃运动执行完成。
50.s404、继续执行若干个单次倾斜跳跃运动,直至所述两个端点与目标点之间的距离相等。
51.具体的,在每个单次倾斜跳跃运动执行完成以后,均重新进行一次所述两个端点与目标点之间距离的计算,以判断是否将机器人调整至目标点的正后方。所述主控装置5在控制机器人进行一个单次倾斜跳跃运动完成后,继续控制机器人执行若干个单次倾斜跳跃运动,直至所述两个端点与目标点之间的距离相等,目标点处于机器人的正前方。
52.s500、控制机器人执行若干个单次直线跳跃运动,并在每个单次直线跳跃运动后获取机器人的质心坐标,直至质心坐标与所述目标点坐标重合。
53.当机器人通过执行若干个倾斜跳跃运动,调整至目标点处于其正前方后,控制机器人执行若干个单次直线跳跃运动,使机器人沿着直线向正前方跳跃;并在每个单次直线跳跃运动完成后进行一次机器人的质心坐标的获取,从而判断质心坐标与目标点坐标是否重合;当质心坐标与目标点坐标重合时,机器人到达目标点。
54.所述步骤s500中控制机器人执行若干个单次直线跳跃运动具体包括:s501、控制所述两个端点对应的顶持装置伸出,且两个顶持装置伸出的长度相等;具体的,控制所述两个端点对应的记忆合金弹簧42伸长,对应的套筒41伸出至中心孔外并顶持地面,且两个电子开关52对所述两个端点对应的记忆合金弹簧42施加的电压相等,使得所述两个端点对应的记忆合金弹簧42伸长的长度相等,从而使得所述两个端点对应的两个顶持装置4伸出的长度相等。
55.s502、当机器人脱离地面后,控制两个顶持装置回缩,直至机器人触地,一个单次直线跳跃运动执行完成。
56.当机器人脱离地面后,尤其指所述两个端点对应的套筒41均脱离地面后,所述主控装置5控制两个电子开关52关闭,两个记忆合金弹簧42恢复原长,则对应的两个套筒41均回缩至中心孔内,避免套筒41对机器人的落地产生不良干涉。当机器人再次触地,则一个单次直线跳跃运动执行完成。
57.因此,本发明所述跳跃滚动式六杆张拉整体机器人可以采用连续跳跃式运动在一般路面上或者崎岖路面上行进,采用单次高性能跳跃运动来克服大尺度障碍物。其中,连续跳跃式运动的单次跳跃高度比较小,约为0.5倍~1倍自身最大尺寸,跳跃频率比较高;而单次高性能跳跃的跳跃高度比较高,约为1倍以上的自身最大尺寸。
58.具体的,如图12、图14和图15所示,以机器人当前触地三角形为
△
abc,a点和c点对应的端点属于同一个刚性杆件组,且用户输入的目标点为e,当前机器人的质心位置为m,来对机器人执行倾斜跳跃运动和直线跳跃运动进行说明:
如图14所示,本发明所述的倾斜跳跃运动中倾斜是指:机器人进行一个单次倾斜跳跃运动后的质心n与m之间的连线nm相对于me之间的连线倾斜,即mn与me之间具有夹角a。如图15所示,本发明所述的直线跳跃运动中直线是指:机器人进行一个单次倾斜跳跃运动后的质心n与m之间的连线nm与me之间的连线重合。
59.本发明中倾斜跳跃运动与直线跳跃运动的区别在于:倾斜跳跃运动表示机器人朝目标点方向跳跃运动的轨迹为曲线,而直线跳跃运动表示机器人朝目标点方向跳跃运动的轨迹为直线。当目标点处于机器人的正前方时,机器人跳跃运动到目标点的轨迹为直线;当目标点处于机器人的侧前方时,机器人跳跃运动到目标点的轨迹包括两种:先曲线后直线。
60.所述控制方法还包括步骤:当所述主控装置判断用户输入的操作指令中所述运动类型为滚动运动时,根据最短路径原则从触地三角形的三条边中选取滚动边;具体的,当所述运动类型为滚动运动时,无需判定机器人触地的三角形类型,即,无论机器人触地的三角形为tc类型还是to类型,机器人都可以执行滚动运动。当所述运动类型为滚动运动时,所述主控装置5根据最短路径原则,从机器人触地的三角形的三条边中选取滚动边。由于机器人触地面为三角形,具有三条边,因此机器人滚动时可以朝向三条边中任意一条边的方向滚动,而最短路径是指机器人朝向三条边中任意一条边的方向滚动后,其质心与目标点之间的距离最小。
61.如图4-图11所示,机器人触地三角形为
△
abc,其具有三条边ab、bc和ac;其中图4-图6为机器人触地三角形
△
abc为to类型时,机器人以ab边为滚动边、c点为驱动端点执行一个单次滚动运动的示意图(图5中箭头表示机器人翻滚方向);图4、图7和图8为机器人触地三角形
△
abc为to类型时,机器人以ac边为滚动边、b点为驱动端点执行一个单次滚动运动的示意图(图7中箭头表示机器人翻滚方向);图9-图11为机器人触地三角形
△
abc为tc类型时,机器人以ab边为滚动边、c点为驱动端点执行一个单次滚动运动的示意图(图10中箭头表示机器人翻滚方向)。
62.当机器人滚动时,可以朝向ab、bc和ac三个方向滚动;则三个方向中机器人滚动并触地平稳后,质心距离目标点最近的路径方向即为最短路径。
63.所述根据最短路径原则从触地三角形的三条边中选取滚动边具体包括:分别以触地三角形的三条边为备选滚动边,计算机器人执行一个单次滚动运动完成后的质心坐标,以获取三个质心坐标;具体的,如图4或图9所示,机器人触地三角形为
△
abc,分别计算机器人以ab边为备选滚动边且c点为驱动端点滚动后的质心坐标、机器人以bc边为备选滚动边且a点为驱动端点滚动后的质心坐标、以及机器人以ac边为备选滚动边且b点为驱动端点滚动后的质心坐标,从而获得三个质心坐标。
64.分别计算并比较所述三个质心坐标与目标点坐标之间的距离;选取距离目标点最短的质心坐标对应的备选滚动边为滚动边。
65.以最短路径原则选取滚动边完成后,以所述滚动边对应的端点为驱动端点,控制机器人执行一个单次滚动运动;所述以所述滚动边对应的端点为驱动端点,控制机器人执行一个单次滚动运动具体包括:
以所述滚动边对应的端点为驱动端点,控制所述驱动端点对应的顶持装置伸出并顶持地面;即,确定所述滚动边对应的端点为驱动端点,以图5和图10中机器人触地三角形为
△
abc,且滚动边为ab边为例,则驱动端点为c点。以c点为驱动端点,控制c点对应的电子开关52开启,则c点对应的记忆合金弹簧42伸长,其对应的套筒41伸出至中心孔外并顶持地面,机器人朝向ab边方向滚动。
66.图4-图6为机器人当前触地三角形为to状态,且以ab边为滚动边,c点为驱动端点,控制机器人执行一个单次滚动运动的示意图;图9-图11为当前触地三角形为tc状态,且以ab边为滚动边,c点为驱动端点,控制机器人执行一个单次滚动运动的示意图。
67.所述顶持装置4脱离地面后,控制所述顶持装置4回缩,直至三个端点同时触地,一个单次滚动运动执行完成。
68.具体的,如图7所示,b点对应的套筒41顶持地面,机器人滚动至套筒41脱离地面后,b点对应的电子开关52关闭,其对应的记忆合金弹簧42恢复原长,套筒41回缩至中心孔内;直至机器人再次有三个端点同时触地,且如图8所示,触地的三个端点中包含a点和c点,一个单次滚动运动执行完成。
69.在一个单次滚动运动执行完成后,获取机器人的质心坐标,并判断质心坐标与目标点坐标是否重合;当不重合时,控制机器人继续执行若干个单次滚动运动,直至质心坐标与目标点坐标重合,机器人以滚动运动运动至目标点。
70.本发明中一实施例,所述跳跃滚动式六杆张拉整体机器人还可以包括存储器(memory)、通信接口(communications interface)和总线;其中,所述微处理器51、存储器和通信接口可以通过总线完成相互间的通信,通信接口可以传输信息,所述微处理器51可以调用存储器中的逻辑指令,以执行上述任意一项控制方法。
71.综上所述,本发明提供了一种跳跃滚动式六杆张拉整体机器人,通过所述主控装置控制对应的顶持装置伸出,即可实现机器人的滚动运动/跳跃运动;相比于现有技术,本发明所述跳跃滚动式六杆张拉整体机器人既可以实现滚动运动,又可以实现跳跃运动;当遇到障碍物时可以通过所述主控装置控制机器人采用跳跃运动进行越障,大大的提升了机器人的越障能力。
72.应当理解的是,本发明的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
