1.本发明涉及非序列光线追迹技术领域,特别涉及一种光学系统高精度快速追迹方法。
背景技术:
2.在计算机几何图形学领域,三角面元被广泛应用于图形渲染中,随着计算机硬件配置的提升,三角面元在数量大时占用过多计算机物理内存现象已不再是困扰难题,但由于其平面特性,对于高精度追迹,尤其是光学领域高精度追迹,单纯依靠三角面元很难满足光学领域追迹精度要求。
3.隐函数由于其方程简单,同时可以简单地确定空间中任何点位于代数曲面的正/负侧(内部/外部),对于不考虑计算机辅助几何设计情况下,是一种非常稳健、快速表征几何曲面,同时符合快速光线追迹的方法。
4.对于规模化光线、非序列、高精度、高效率等要求为以非序列光线追迹为主的光学软件分析过程来说,若能结合三角面元和隐函数技术进行光线和几何交互求解,将对于解决交互精度和效率问题至关重要。
技术实现要素:
5.鉴于上述问题,本发明的目的是提出一种光学系统高精度快速追迹方法。为了解决现有光学系统中光机表面与规模光线交互速度问题,同时确保高精度。基于光学元件矢高方程和机械元件nurbs表征,结合空间分割和三角面元细分及求交技术,在合适精度水平下获取良好迭代初值,通过将光学面形矢高方程构造成单变量隐函数表征,结合牛顿或拟牛顿法,实现快速、高精度追迹。
6.为实现上述目的,本发明采用以下具体技术方案:
7.本发明提供一种光学系统高精度快速追迹方法,包括以下步骤:
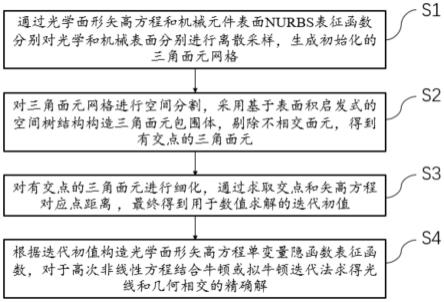
8.s1、通过光学面形矢高方程和机械元件表面nurbs表征函数分别对光学和机械表面分别进行离散采样,生成初始化的三角面元网格;
9.s2、对三角面元网格进行空间分割,采用基于表面积启发式的空间树结构构造三角面元包围体,剔除不相交面元,得到有交点的三角面元;
10.s3、对有交点的三角面元进行细化,通过求取交点和矢高方程对应点距离d,最终得到用于数值求解的迭代初值;
11.s4、根据迭代初值构造光学面形矢高方程单变量隐函数表征函数,对于高次非线性方程结合牛顿或拟牛顿迭代法求得光线和几何相交的精确解。
12.优选地,在步骤s1中:
13.对于光学面形,根据光机模型轮廓尺寸以及不同面形精度要求,通过光学矢高方程,在x、y两个方向进行等间隔采样,带入矢高方程,生成空间三维采样点。
14.优选地,在步骤s1中:
15.对于机械表面,根据nurbs表征,在uv参数轴上进行等间隔采样,进而映射到nurbs曲面,生成空间三维采样点;
16.依次连接空间三维采样点之间的相邻点,生成初始化三角面元网格。
17.优选地,在步骤s2中:
18.采用基于表面积启发式的空间树结构构造三角面元包围体,生成包围体二叉树结构,设定子节点内最多三角面元数量,根据光线矢量,排除背离光线矢量且位于光线远点背面的几何体,形成非追迹区域;
19.通过连接光线原点和几何体最大外包络,形成最大追迹区间角θ,区间角内为追迹区域,剔除位于区间角度外的光线。
20.优选地,在步骤s3中:
21.对有交点的三角面元进行细化;
22.三角面元的三个顶点坐标分别为a(x1,y1,z1),b(x2,y2,z2),c(x3,y3,z3),
23.选取原三角面元各边中点,将三角面元一分为四,新生成顶点坐标分别为ab(x4,y4,z4),ac(x5,y5,z5),bc(x6,y6,z6),生成四个小三角形面元;
24.对四个小三角形面元进行顺序编号,分别对四个三角面元进行相交测试,通过求取交点和矢高方程对应点距离d:
[0025][0026]
其中,δ为坐标之差;
[0027]
根据设定精度要求与距离d进行对比,判断是否对三角面元继续进行递归细分,最终得到用于数值求解的迭代初值。
[0028]
与现有技术相比,本发明的有益效果为:
[0029]
本发明基于隐函数代数表征曲面,提出了一种结合三角面元和隐函数的光学系统高精度快速追迹方法,通过光学面形矢高方程和机械元件表面nurbs表征函数,构造离散三角面面元。结合设定的两级加速结构,并采用高效处理布局三角面元细化策略和方案,得到良好的迭代初值的同时提高了交互效率。借鉴隐函数代数求解快速特征,将多变量隐函数构造成单变量,实现加速求解,结合牛顿或拟牛顿迭代法求得光线和几何相交的精确解。
附图说明
[0030]
图1是根据本发明实施例提供的光学系统高精度快速追迹方法的流程示意图。
[0031]
图2是根据本发明实施例提供的光学系统高精度快速追迹方法的程序框图。
[0032]
图3是根据本发明实施例提供的快速排除不相交三角面元方法示意图。
[0033]
图4是根据本发明实施例提供的三角面元细分示意图。
具体实施方式
[0034]
在下文中,将参考附图描述本发明的实施例。在下面的描述中,相同的模块使用相同的附图标记表示。在相同的附图标记的情况下,它们的名称和功能也相同。因此,将不重复其详细描述。
[0035]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发
明,而不构成对本发明的限制。
[0036]
图1示出了根据本发明实施例提供的光学系统高精度快速追迹方法的流程示意图。
[0037]
图2示出了根据本发明实施例提供的光学系统高精度快速追迹方法的程序框图。
[0038]
如图1-2所示,本发明实施例提供的光学系统高精度快速追迹方法包括以下步骤:
[0039]
s1、通过光学面形矢高方程和机械元件表面nurbs表征函数分别对光学和机械表面分别进行离散采样,生成初始化的三角面元网格。
[0040]
首先通过光学面形矢高方程和机械元件表面nurbs表征函数,对光学和机械表面分开进行离散采样:
[0041]
对于光学面形,根据光机模型轮廓尺寸,以及不同面形精度要求,通过光学矢高方程,对光学表面在x、y两个方向进行等间隔采样,带入矢高方程,生成三维采样点;
[0042]
对于机械表面,根据其nurbs表征,在uv参数轴上进行等间隔采样,继而映射到nurbs曲面,生成空间三维采样点。
[0043]
依次连接相邻点,记录并生成初始化的三角面元网格。
[0044]
s2、对三角面元网格进行空间分割,采用基于表面积启发式的空间树结构构造三角面元包围体,剔除不相交面元,得到有交点的三角面元。
[0045]
图3示出了根据本发明实施例提供的快速排除不相交三角面元方法示意图。
[0046]
如图3所示,本发明采用基于表面积启发式的空间树结构构造三角面元包围体,生成包围体二叉树结构,设定子节点内最多三角面元数量,比如设定子节点内最多三角面元个数n为1,根据光线矢量,快速排除背离光线矢量且位于光线远点背面的几何体,形成非追迹区域。
[0047]
根据光线矢量,快速排除背离光线矢量且位于光线远点背面的几何体,通过连接光线原点和几何体最大外包络,形成最大追迹区间角θ,区间角内为追迹区域,剔除位于区间角度外的光线,在该次求交中这部分光线不再参与快速排除不相交三角面元。
[0048]
s3、对有交点的三角面元进行细化,通过求取交点和矢高方程对应点距离d,最终得到用于数值求解的迭代初值。
[0049]
图4示出了根据本发明实施例提供的三角面元细分示意图。
[0050]
如图4所示,对相交测试有交点的三角面元进行细化,如三角形三顶点坐标分别为a(x1,y1,z1),b(x2,y2,z2),c(x3,y3,z3),选取原三角面元各边中点,将三角面元一分为四,新生成顶点坐标分别为ab(x4,y4,z4),ac(x5,y5,z5),bc(x6,y6,z6),生成四个小三角形面元,对各三角形进行顺序编号,分别对四个三角面元进行相交测试,通过求取交点和矢高方程对应点距离d(δ为坐标之差),根据设定的精度要和d进行对比,判断是否对三角面元进行递归细分,最终得到用于数值求解的良好迭代初值。
[0051]
s4、根据迭代初值构造光学面形矢高方程单变量隐函数表征函数,对于高次非线性方程结合牛顿或拟牛顿迭代法求得光线和几何相交的精确解。
[0052]
在获取初值的基础上,将光线方程带入光学面形矢高方程,生成关于距离t的单变量隐函数代数表达式,对于高次非线性方程,结合牛顿或拟牛顿迭代法求得光线和几何相交的精确解。
[0053]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例
性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0054]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。