1.本发明属于表面缺陷检测领域,具体涉及一种基于白光显微干涉的微球内外表面缺陷检测装置及方法。
背景技术:
2.微球是微光学、微机械领域内常见的元器件,其主要应用领域——惯性约束聚变是当前最前沿的研究热点之一,可以为人类提供高效、清洁的能源,对天体物理、爆炸模拟等研究具有重要意义,其表面面形精度对其性能有着至关重要的影响。因此实现微球表面缺陷的测量并保证测量的高精度和高效率具有重要意义。
3.传统的检测手段,如原子力显微镜和扫描电子显微镜分辨率满足精度要求,但单次测量范围非常小,视场为微米量级,检测效率较低,存在孤立缺陷点容易遗漏等问题。x射线相衬成像法基于x射线显微辐射成像,能够对微球内外表面缺陷进行测试,处理速度快,但是该方法获得的微球图像只是微球的某一个截面上的图像,且测试精度低于光学干涉等方法。数字全息显微法优点在于单次测量速度快、实时性好,只需采集一幅干涉图像便可进行解算。但该方案采用非共光路系统,光学元件多,质量难以保证,系统误差大,容易受环境振动干扰。传统的激光干涉测试技术能够测量球面但是存在2π整数倍相位缺失的问题无法获取大梯度表面缺陷的真实高度,经典的白光干涉测试机理难以直接应用于球面面形的检测。
技术实现要素:
4.本发明的目的在于提供一种基于白光显微干涉的微球内外表面缺陷检测装置及方法,能够有效解决缺陷跃变处的2π整数倍相位缺失问题,实现全视场的微球零位干涉测量,通过光程匹配模块实现不同直径以及微球内外表面的绝对高度测量,从而获取其表面缺陷信息。
5.实现本发明目的的技术解决方案为:一种基于白光显微干涉的微球内外表面缺陷检测装置,包括白光光源、第一准直透镜、光阑、第二准直透镜、第一偏振片、光程匹配模块和显微干涉模块,光程匹配模块包括第一偏振分光棱镜、第一1/4波片、第一平面反射镜、三维微位移平台、第二1/4波片、第二平面反射镜、pzt移相器,显微干涉模块包括第二偏振分光棱镜、第三1/4波片、第一显微物镜、第四1/4波片、第二显微物镜、球面反射镜、第二偏振片、管镜、cmos相机。
6.白光光源发出的光经第一准直物镜汇聚至光阑中心,后经第二准直物镜变为平行光,通过第一偏振片变为线偏振光进入光程匹配模块,线偏振光以与第一偏振分光棱镜的分光面呈45
°
角入射至第一偏振分光棱镜,在其分光面分成偏振方向相互垂直的p光与s光,其中透射p光作为测试光通过第一1/4波片变为圆偏振光入射至第一平面反射镜,经第一平面反射镜反射的光再次通过第一1/4波片变为线偏振s光后经第一偏振分光棱镜反射后进入显微干涉模块。第一偏振分光棱镜反射的s光作为参考光通过第二1/4波片变为圆偏振光
入射至第二平面反射镜,经第二平面反射镜8反射的光再次通过第二1/4波片变为线偏振p光后经第一偏振分光棱镜透射后进入显微干涉模块。
7.偏振方向相互正交的线偏振p光与线偏振s光入射至第二偏振分光棱镜,且与第二偏振分光棱镜的分光面呈45
°
角入射,线偏振p光作为测试光,线偏振s光作为参考光,线偏振p光经第二偏振分光棱镜透射后通过第四1/4波片变为圆偏振光,然后经过第二显微物镜到达球面反射镜表面,经球面反射镜反射后再经过第二显微物镜、第四1/4波片变为第二线偏振s光入射至第二偏振分光棱镜,经第二分光棱镜的分光面反射后依次经过第二偏振片、管镜到达cmos相机的靶面。线偏振s光经第二偏振分光棱镜反射后通过第三1/4波片变为圆偏振光,然后经过第一显微物镜到达中空的被测微球表面,经被测微球反射后再经过第一显微物镜、第三1/4波片变为第二线偏振p入射至第二偏振分光棱镜,经第二分光棱镜的分光面透射后依次经过第二偏振片、管镜到达cmos相机的靶面,并与第二线偏振s光发生干涉。
8.一种基于白光显微干涉的微球内外表面缺陷检测装置的检测方法,方法步骤如下:
9.步骤一、白光光源出射的光通过第一准直透镜、光阑、第二准直物镜、第一偏振片变为平行的线偏振光,在第一偏振分光棱镜分光面被分为偏振方向相互垂直的p光与s光。由光程匹配模块进入显微干涉模块。
10.步骤二、调整被测微球使其球心与第一显微物镜的后焦点重合,调整coms相机使其分别对被测微球的内、外表面清晰成像。
11.步骤三、调整球面反射镜的球心与第二显微物镜的后焦点重合,实现参考臂光路的自准直。
12.步骤四、调整三维微位移平台使得光程匹配模块中参考光与测试光的光程差正好补偿显微干涉模块中参考臂与测试臂之间的光程差,从而在cmos相机的表面得到稳定的干涉条纹。
13.步骤五、使用pzt移相器进行等步长间隔移相,控制协同调用pzt移相器与cmos相机采集多帧干涉图。
14.步骤六、对干涉图进行解算,实现待测微球的全视场内外表面的绝对高度测量。
15.本发明于现有技术相比,其显著优点在于:
16.(1)使用白光光源,能够有效解决使用激光干涉技术测量球面面形时,由于在缺陷跃变点处2π整数倍相位缺失的问题导致无法获得大梯度表面缺陷的真实高度的问题;(2)由于白光光源相干长度短,可以抑制非测量面的条纹干扰,提高干涉条纹对比度;(3)使用偏振干涉技术,降低了光能损耗,提高了光能利用率;(4)通过移动光程匹配模块中的位移台来匹配参考光路和测试光路的光程差,可以实现对不同直径微球的测量以及微球内外表面的选择测量;(5)通过将光程匹配模块于显微干涉模块相分离,使得在调节光程匹配模块时,不会影响显微干涉模块的成像质量;(6)使用标准球面镜作为参考镜,可以实现微球的大视场测量。
附图说明
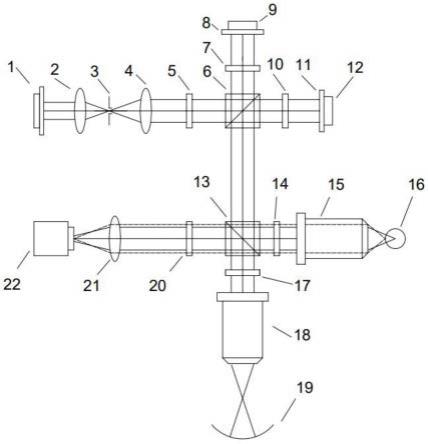
17.图1为本发明基于白光显微干涉的微球内外表面缺陷检测装置的光路图。
18.图2为实验采集到的连续七帧干涉图像。
19.图3为实施例中所测得微球表面三维形貌图以及其中的孤立缺陷图。
具体实施方式
20.下面结合附图对本发明作进一步详细描述。
21.结合图1,一种基于白光显微干涉的微球内外表面缺陷检测装置,包括白光光源1、第一准直透镜2、光阑3、第二准直透镜4、第一偏振片5、光程匹配模块和显微干涉模块,光程匹配模块包括第一偏振分光棱镜6、第一1/4波片7、第一平面反射镜8、三维微位移平台9、第二1/4波片10、第二平面反射镜11、pzt移相器12,显微干涉模块包括第二偏振分光棱镜13、第三1/4波片14、第一显微物镜15、第四1/4波片17、第二显微物镜18、球面反射镜19、第二偏振片20、管镜21、cmos相机22。
22.白光光源1发出的光经第一准直物镜2汇聚至光阑3中心,后经第二准直物镜4变为平行光,通过第一偏振片5变为线偏振光进入光程匹配模块,线偏振光以与第一偏振分光棱镜6的分光面呈45
°
角入射至第一偏振分光棱镜6,在其分光面分成偏振方向相互垂直的p光与s光,其中透射p光作为测试光通过第一1/4波片10变为圆偏振光入射至第一平面反射镜11,经第一平面反射镜11反射的光再次通过第一1/4波片10变为线偏振s光后经第一偏振分光棱镜6反射后进入显微干涉模块;第一偏振分光棱镜6反射的s光作为参考光通过第二1/4波片7变为圆偏振光入射至第二平面反射镜8,经第二平面反射镜8反射的光再次通过第二1/4波片7变为线偏振p光后经第一偏振分光棱镜6透射后进入显微干涉模块。
23.偏振方向相互正交的线偏振p光与线偏振s光入射至第二偏振分光棱镜13,且与第二偏振分光棱镜13的分光面呈45
°
角入射,线偏振p光作为测试光,线偏振s光作为参考光,线偏振p光经第二偏振分光棱镜13透射后通过第四1/4波片17变为圆偏振光,然后经过第二显微物镜18到达球面反射镜19表面,经球面反射镜19反射后再经过第二显微物镜18、第四1/4波片17变为第二线偏振s光入射至第二偏振分光棱镜13,经第二分光棱镜13的分光面反射后依次经过第二偏振片20、管镜21到达cmos相机22的靶面;线偏振s光经第二偏振分光棱镜13反射后通过第三1/4波片14变为圆偏振光,然后经过第一显微物镜15到达中空的被测微球16表面,经被测微球16反射后再经过第一显微物镜15、第三1/4波片14变为第二线偏振p入射至第二偏振分光棱镜13,经第二分光棱镜13的分光面透射后依次经过第二偏振片20、管镜21到达cmos相机22的靶面,并与第二线偏振s光发生干涉。
24.所述三维微位移平台9的调整实现参考臂与测试臂中被测微球16的内、外表面以及不同直径微球的光程匹配。
25.所述第一1/4波片7、第二1/4波片10、第三1/4波片14、第四1/4波片17的快轴分别与水平方向呈45
°
夹角,使得通过其两次的线偏振光出射为偏振方向改变90
°
的线偏振光。
26.所述cmos相机22的轴向位置,实现在其靶面分别对不同直径微球的内外表面成像。
27.所述第一偏振分光棱镜6的分光面与第二偏振分光棱镜13的分光面呈90
°
夹角。
28.所述球面反射镜19为标准球面反射镜,用以实现微球的大视场测量,当被测微球16直径变化时,球面反射镜19无需更换。
29.结合图1,一种基于上述权利要求所述的基于白光显微干涉的微球内外表面缺陷
检测装置的检测方法,方法步骤如下:
30.步骤一、白光光源1出射的光通过第一准直透镜2、光阑3、第二准直物镜4、第一偏振片5变为平行的线偏振光,在第一偏振分光棱镜6分光面被分为偏振方向相互垂直的p光与s光;由光程匹配模块进入显微干涉模块;
31.步骤二、调整被测微球16使其球心与第一显微物镜15的后焦点重合,调整coms相机22使其分别对被测微球16的内、外表面清晰成像;
32.步骤三、调整球面反射镜19的球心与第二显微物镜18的后焦点重合,实现参考臂光路的自准直;
33.步骤四、调整三维微位移平台9使得光程匹配模块中参考光与测试光的光程差正好补偿显微干涉模块中参考臂与测试臂之间的光程差,从而在cmos相机22的表面得到稳定的干涉条纹;
34.其中参考臂是指由参考光经过第一偏振分光棱镜6、第一λ/4波片7、第一平面反射镜8、第二偏振分光棱镜13、第四λ/4波片17、第二显微物镜18、球面反射镜19、第二偏振片20、管镜21和coms相机22组成的光路。
35.测试臂是指由测试光经过第一偏振分光棱镜6、第二λ/4波片10、第二平面反射镜11、第二偏振分光棱镜13、第三λ/4波片14、第一显微物镜15、待测微球16、第二偏振片20、管镜21和coms相机22组成的光路。
36.步骤五、使用pzt移相器12进行等步长间隔移相,控制协同调用pzt移相器12与cmos相机22采集多帧干涉图;
37.步骤六、对干涉图进行解算,实现待测微球16的全视场内外表面的绝对高度测量。
38.结合图1,上述步骤一中光源为宽带白光光源。
39.上述步骤五中通过移动pzt移相器12采集到两组干涉条纹,一组干涉条纹对应待测微球16的内表面与球面反射镜19的干涉条纹,另一组对应待测微球16的外表面与球面反射镜19的干涉条纹。
40.上述步骤六中对干涉图进行解算,采用传统的七步移相算法分别计算白光相移干涉图像中每个像素点的调制度分布及相位信息,然后由调制度峰值探测算法精确定位其峰值位置,即白光干涉信号的零光程差位置,最终恢复出待测微球16内外表面的高度信息:
41.h=n(λ0/8) δφλ0/4π
42.其中,h为被测微球16的表面高度信息,n是调制度峰值位置对应的pzt移相器12扫描帧数,即零光程差点位置对应的采样点,λ0为白光光源1的中心波长,δφ为相移变化量,计算公式为:
[0043][0044]
其中,i-1
、i3、i-3
、i1、i0、i-2
、i-2
分别对应为七幅干涉图强度。
[0045]
图2为从使用pzt等步长间隔移相采集到的多帧干涉图像中截取的连续七帧干涉图像。
[0046]
图3为用本方法测量的微球表面三维形貌分布以及微球表面一个孤立缺陷点的100倍放大显示。
[0047]
综上所述,本发明将白光干涉技术与显微干涉技术相结合,搭建出一种基于白光
显微干涉技术的微球表面缺陷检测装置,包括光程匹配模块以及显微干涉模块,实现对微球内外表面的缺陷测量有效解决激光干涉技术中缺陷跃变处的2π整数倍相位缺失问题,实现全视场的微球零位干涉测量,通过光程匹配模块实现不同直径以及微球内外表面的绝对高度测量,从而获取其表面缺陷信息。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。