1.本发明涉及声呐追踪技术领域,具体领域为一种基于航迹关联的多假设自动跟踪方法。
背景技术:
2.随着对声纳设备智能化需求越来越高,目标自动跟踪技术也亟待技术升级。特别是对同一目标进行跟踪时,在没有人工干预的情况下,需要使用同一跟踪器进行持续跟踪,不能发生跟踪器串扰的问题。但当多目标发生交叉或目标强度起伏较大时,现有自动跟踪技术无法满足对同一个目标使用固定跟踪器进行持续跟踪的需求;标准的自动跟踪基本流程如图1所示,流程中数据关联的方法有jpda、粒子滤波等;一、对于拖线阵实际使用情况而言,由于其孔径大、工作频段低,其目标检测能力较强,可以检测到很多目标,因此目标的合并、交叉情况非常复杂,并且测向不准导致目标检测点变化不能严格符合运动模型。跟踪关联方法如jpda、粒子滤波等,无法完全保持正确跟踪。本发明要解决针对拖线阵实际情况下的多目标跟踪的持续性和准确性。
3.二、对检测点进行关联的传统多假设跟踪系统复杂、计算量大,在工程应用由于计算量限制及系统稳定性要求难以进行实现。本发明要解决跟踪系统复杂和计算量大,导致无法在工程中应用的问题。
4.三、现有各种自动跟踪系统的通用性不强,应用到各类型声纳中需要进行复杂的参数调整后才能正常使用。本发明要解决自动跟踪方法使用的通用性问题。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种基于航迹关联的多假设自动跟踪方法。
6.为实现上述目的,本发明提供如下技术方案:一种基于航迹关联的多假设自动跟踪方法,其步骤为:(1)目标检测:采用尖峰检测算法进行,输入为宽带警戒数据,输出宽带警戒数据尖峰的尖峰个数、各尖峰舷角、各尖峰能量;(2)检测数据关联:采用最近15秒检测数据及跟踪信息进行gnn关联,建立新目标并维持老目标;(3)滤波:由于检测得到的尖峰方位是固定的宽带警戒波束方位,以此作为跟踪结果不平滑,采用三点抛物插值进行平滑滤波;(4)预测:预测采用舷角变化率递推法进行方位预测;(5)错误跟踪目标与消失目标撤销:gnn关联容易产生跟踪目标的误跟踪,因而对目标进行误跟踪进行判断;(6)跟踪器保留:当前装备均以跟踪器号作为辨别不同目标的办法,因而尽量保证
跟踪器号不串号,即尽量使用同一跟踪器号跟踪同一目标;为尽量保证跟踪器不串号,所有撤销目标的跟踪器不置为空,进入跟踪器保留待关联状态;(7)航迹多假设关联:所有撤销的目标信息写入航迹库。航迹库中的航迹与新跟踪的目标航迹进行关联,以保证跟踪的连续性。
7.优选的,具体步骤为:1)撤销目标的舷角变化率拟合,采用最后一段轨迹进行最小二乘拟合;2)所有撤销的目标信息写入航迹库;3)在每个时间节拍更新航迹库中各航迹的时间计数信息holdcount(n), n为航迹号,为使航迹库数据存储不越界,对holdcount(n)大于时间门限的航迹进行清除,state(n)置为无效。
8.4)新目标i稳定跟踪一定时间后,与所有航迹库的航迹进行关联,经过优选判断,如有航迹库中航迹与新目标关联成功,将新目标信息搬移至优选航迹库中航迹的原有跟踪器上,并重新启动该目标;优选的,步骤2)中,写入信息包括以下内容:state:航迹状态;beare:航迹中止时的舷角;bearn:高速运动目标的当前预测舷角,写入时bearn=beare;tagnum:原跟踪器号;holdcount:航迹时间计数,计数越大,航迹写入航迹库时间越长;beargrae:舷角变化率。
9.优选的,根据步骤4),对于新目标i,在第1s时筛选所有舷角差满足要求的有效航迹计算舷角差:diffbear=abs(bearn(n)-bear(i))其中diffbear舷角差,bear(i)目标i的起始舷角,abs()为取绝对值运算;对所有满足diffbear《tbear,holdcount(n)《tcount1的航迹,选择diffbear最小为优选目标,tbear:舷角差门限;tcount1:航迹时间门限;若优选目标在航迹库的航迹号为n,tagnum(n)号跟踪器未进行其它目标的跟踪,将新目标信息搬移至tagnum(n)号跟踪器上,并启动tagnum(n)号跟踪器;若tagnum(n)号跟踪器已进行其它目标的跟踪,则不再进行操作;对于新目标i,在第30s时筛选所有舷角差满足要求的有效航迹;对所有满足diffbear 《tbear的航迹,计算连线舷角变化率beargra2:beargra2=(bears(i)-bear(n))/ holdcount(n)计算新目标舷角变化率beargra3;计算折角:s=abs(beargra2
‑ꢀ
beargra1) abs(beargra3-beargra2) ,折角s最小为优选目标;若优选目标在航迹库的航迹号为n,tagnum(n)号跟踪器未进行其它目标的跟踪,将新目标信息搬移至tagnum(n)号跟踪器上,并启动tagnum(n)号跟踪器;若tagnum(n)号跟踪器已进行其它目标的跟踪,将其它目标的跟踪搬移至其他闲置跟踪器上。新目标信息搬移至tagnum(n)号跟踪器上,重新启动tagnum(n)号跟踪器。
10.优选的,根据步骤(4),判断方法有:目标偏折、目标重合;目标偏折:本目标两段航迹方位变化率有大偏差;目标:非交叉状态;此外对于消失目标不再有检测点关联目标进行撤销,所有撤销的目标信息作为航迹写入航迹库。
11.优选的,根据步骤(5),新目标不可直接写入该跟踪器,新目标只能通过与航迹目标库中聚簇关联后才能写入该跟踪器。
12.与现有技术相比,本发明的有益效果是:综合考虑算法的跟踪效果、计算量及系统鲁棒性。采用一种两级mht关联系统,先对检测点进行全局最近邻(gnn,global nearest neighbour)关联,主要针对新目标建立与维持;进行误跟踪判断并将误跟踪目标进行撤销,对无检测点关联的目标进行撤销;将所有已撤销目标航迹信息写入航迹库(也可称为mht聚簇库),与当前目标航迹进行多假设关联,保证跟踪的连续性。
附图说明
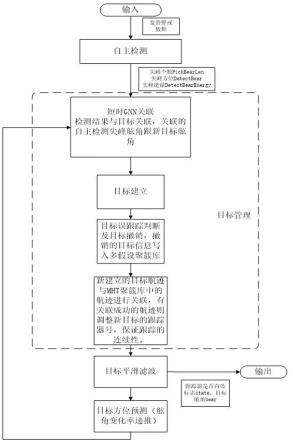
13.图1为自动跟踪基本流程图;图2为本发明的自主跟踪流程及数据流流程图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.请参阅图2,本发明提供一种技术方案:一种基于航迹关联的多假设自动跟踪方法,处理的步骤概况如下:a)目标检测采用尖峰检测算法进行,输入为宽带警戒数据,输出宽带警戒数据尖峰的尖峰个数、各尖峰舷角、各尖峰能量。
16.b)检测数据关联采用最近15秒检测数据及跟踪信息进行gnn关联,建立新目标并维持老目标。
17.c)滤波由于检测得到的尖峰方位是固定的宽带警戒波束方位,以此作为跟踪结果不平滑,采用三点抛物插值进行平滑滤波。
18.d)预测预测采用舷角变化率递推法(最小二乘递推)进行方位预测。
19.f)错误跟踪目标与消失目标撤销gnn关联容易产生跟踪目标的误跟踪。因而对目标进行误跟踪进行判断,判断方法有:目标偏折(本目标两段航迹方位变化率有大偏差)、目标(非交叉状态)重合。此外对于消失目标(不再有检测点关联)目标进行撤销。所有撤销的目标信息作为航迹写入航迹库。
20.g)跟踪器保留
当前装备均以跟踪器号作为辨别不同目标的办法,因而尽量保证跟踪器号不串号,即尽量使用同一跟踪器号跟踪同一目标。为尽量保证跟踪器不串号,所有撤销目标的跟踪器不置为空,进入跟踪器保留待关联状态(新目标不可直接写入该跟踪器,新目标只能通过与航迹目标库中聚簇关联后才能写入该跟踪器)。
21.h)航迹多假设关联所有撤销的目标信息写入航迹库(即mht聚簇库)。航迹库中的航迹(聚簇)与新跟踪的目标航迹进行关联,以保证跟踪的连续性。
22.多假设关联具体流程如下:1)撤销目标的舷角变化率拟合。采用最后一段轨迹进行最小二乘拟合。
23.对某一撤销目标:拟合结果beargrae。
24.2)所有撤销的目标信息写入航迹库(mht聚簇库)。写入信息包括以下内容:state:航迹状态(1:航迹有效;0:航迹无效);beare:航迹中止时的舷角;bearn:高速运动目标的当前预测舷角,写入时bearn=beare;tagnum:原跟踪器号;holdcount:航迹时间计数,计数越大,航迹写入航迹库时间越长;beargrae:舷角变化率。
25.3)在每个时间节拍更新航迹库中各航迹的时间计数信息holdcount(n)( n为航迹号,(n)代表第n号航迹)、bearn(n)。为使航迹库数据存储不越界,对holdcount(n)大于时间门限的航迹进行清除,state(n)置为无效。
26.4)新目标i稳定跟踪一定时间后(选择第1s与第30s),与所有航迹库的航迹进行关联,经过优选判断,如有航迹库中航迹与新目标关联成功,将新目标信息搬移至优选航迹库中航迹的原有跟踪器上,并重新启动该目标。
27.对于新目标i,在第1s时筛选所有舷角差满足要求的有效航迹计算舷角差:diffbear=abs(bearn(n)-bear(i))其中diffbear舷角差,bear(i)目标i的起始舷角,abs()为取绝对值运算。
28.对所有满足diffbear《tbear,holdcount(n)《tcount1的航迹,选择diffbear最小为优选目标。tbear:舷角差门限;tcount1:航迹时间门限。
29.若优选目标在航迹库的航迹号为n,tagnum(n)号跟踪器未进行其它目标的跟踪,将新目标信息搬移至tagnum(n)号跟踪器上,并启动tagnum(n)号跟踪器。
30.若tagnum(n)号跟踪器已进行其它目标的跟踪,则不再进行操作。
31.对于新目标i,在第30s时筛选所有舷角差满足要求的有效航迹。
32.对所有满足diffbear 《tbear的航迹,计算连线舷角变化率beargra2:beargra2=(bears(i)-bear(n))/ holdcount(n)计算新目标舷角变化率beargra3。
33.计算折角:s=abs(beargra2
‑ꢀ
beargra1) abs(beargra3-beargra2) ,折角s最小为优选目标。
34.若优选目标在航迹库的航迹号为n,tagnum(n)号跟踪器未进行其它目标的跟踪,将新目标信息搬移至tagnum(n)号跟踪器上,并启动tagnum(n)号跟踪器。
35.若tagnum(n)号跟踪器已进行其它目标的跟踪,将其它目标的跟踪搬移至其他闲置跟踪器上。新目标信息搬移至tagnum(n)号跟踪器上,重新启动tagnum(n)号跟踪器。
36.通过本技术方案,一、对于拖线阵目标跟踪情况复杂的实际应用环境,航迹关联的多假设跟踪依赖先验知识,但在有足够的实际数据情况下,可进行多假设航迹关联的不断优化,相当于已掌握了先验知识,在数据支持下经过优化的mht算法更容易达到准确稳定的目标跟踪效果。
37.二、本专利采用的航迹关联多假设跟踪在保证计算量极小,系统绝对稳定的同时可以对各段航迹,包括已结束的航迹和正在跟踪的航迹,进行再关联,有效保证了跟踪的连续性。
38.三、本算法的先验知识在不同的拖线阵及不同的使用环境中有其通性。在实际应用中不同型号的拖线阵若采用本算法参数调整比较简单,即便不调整也可满足自动跟踪性能要求。
39.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。