技术特征:
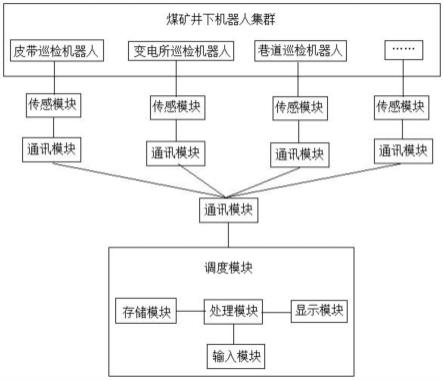
1.一种煤矿巡检机器人集群任务调度系统,其特征在于,包括:煤矿井下机器人集群,所述煤矿井下机器人集群由分布在煤矿井下的多个机器人组成;多个传感模块,所述传感模块安装在对应的所述机器人上;多个通讯模块,一部分所述通讯模块安装在对应的所述机器人上,另一部分所述通讯模块位于机器人附近;调度模块,所述调度模块与所述通讯模块相连,所述通讯模块用于将所述传感模块的信号发送给所述调度模块,并将所述调度模块的指令发送给所述机器人。2.根据权利要求1所述的煤矿巡检机器人集群任务调度系统,其特征在于,所述传感模块包括内部传感器和外部传感器,所述内部传感器和所述外部传感器均与一部分所述通讯模块相连,所述内部传感器用于监测所述机器人本体的状态信息,所述外部传感器用于采集机器人周围的环境信息。3.根据权利要求1所述的煤矿巡检机器人集群任务调度系统,其特征在于,一部分所述通讯模块为无线模块、有线模块中的至少一种,另一部分所述通讯模块包括通讯基站、工业环网和通讯主机。4.根据权利要求2所述的煤矿巡检机器人集群任务调度系统,其特征在于,所述调度模块包括存储模块、处理模块、输入模块和显示模块,所述存储模块内存储有不同种类机器人的作业任务和作业记录;所述处理模块用于处理传感模块的信号并根据信号产生调度机器人的指令,所述输入模块用于人工输入调度机器人的指令,所述显示模块用于实时显示机器人本体的状态信息和机器人周围的环境信息。5.一种煤矿巡检机器人集群任务调度的方法,采用如权利要求1-4中任一项所述的煤矿巡检机器人集群任务调度系统对机器人进行调度,其特征在于,包括,步骤一:调用各机器人系统配套的api,以实时获取机器人的速度、位置、电量和任务信息;步骤二:判断任务是否由单个机器人独立完成,在任务需要多个机器人共同完成时,计算各机器人与任务之间的综合代价,将任务分配给综合代价值最小的机器人。6.根据权利要求5所述的方法,其特征在于,步骤二中,在任务由单个机器人完成时,单个机器人按照各自预设的任务进行工作。7.根据权利要求5所述的方法,其特征在于,在任务需要多个同种类的机器人共同完成,且多个同种类的机器人之间有重合的工作区域时,根据每个机器人当前任务执行情况、机器人运行状况,采用替换机器人的方式对任务分配进行实时调整;在任务需要多个同种类的机器人共同完成,且多个同种类的机器人之间没有重合的工作区域时,每个机器人按照各自预设的任务进行工作。8.根据权利要求5所述的方法,其特征在于,在任务需要多个不同种类的机器人共同完成时,各机器人与任务之间的综合代价函数为:成时,各机器人与任务之间的综合代价函数为:
其中,dist(r
i
,t
t
)表示第i个机器人r
i
完成某个任务t
t
所行驶的距离,r
x
_pos
i
和r
y
_pos
i
分别表示第i个机器人的横坐标和纵坐标,t
x
_pos
t
和t
y
_pos
t
分别表示第t个任务点的横坐标和纵坐标;dis(t
i
,t
t
)表示第i个任务点和第t个任务点距离;bet(r
i
,t
t
)表示第i个机器人r
i
完成某个任务t
t
所消耗的电量,表示第i个机器人r
i
单位距离所消耗的电量。9.根据权利要求8所述的方法,其特征在于,若第i个机器人r
i
机器人所剩电量大于等于当前任务的电量消耗与充电任务的电量消耗bet(r
i
,q
charge
),则能够分配当前任务,即配当前任务,即配当前任务,即若第i个机器人r
i
机器人所剩电量小于当前任务的电量消耗与充电任务的电量消耗bet(r
i
,q
charge
),则机器人r
i
只能分配充电任务。10.根据权利要求9所述的方法,其特征在于,步骤二中,任务分配给综合代价值最小的机器人具体过程为:s1、调度模块获取机器人r
n
的速度位置当前电量剩余电量每个机器人接收到的任务数为n和任务信息s2、根据综合代价函数求得r
i
机器人完成任务t
i
所需要的综合代价值并记录;s3、计算机器人r
i
剩余运行时间s4、对综合代价值从小至大依次判断任务t
i
是否已经分配,若已分配,则继续本操作,直至所有机器人均被分配任务;s5、若在s4中某个机器人未分配到任务,该机器人对应的且对应的则进行下一步,反之,返回s4中继续判断;s6、更新机器人r
i
的剩余运行时间剩余电量接收到的任务数为n,并执行s4,直至所有机器人均被分配任务。
技术总结
本发明公开了一种煤矿巡检机器人集群任务调度系统,包括:煤矿井下机器人集群,煤矿井下机器人集群由分布在煤矿井下的多个机器人组成;多个传感模块,传感模块安装在对应的机器人上;多个通讯模块,一部分通讯模块安装在对应的机器人上,另一部分通讯模块位于机器人附近;调度模块,调度模块与通讯模块相连,通讯模块用于将传感模块的信号发送给调度模块,并将调度模块的指令发送给机器人。本发明利用传感模块来实时采集对应机器人的状态信息和机器人周围的环境信息,从而做到对煤矿井下状态的实时监控,通过调度模块对机器人的任务进行调度,保障进行工作有序、高效的进行,提高了机器人之间的协作能力和工作效率。器人之间的协作能力和工作效率。器人之间的协作能力和工作效率。
技术研发人员:闫敬旺 王树斌 牛虎明 陈万胜 王建文 谭震 高永军 任长忠 张德生 韩安 张袁浩
受保护的技术使用者:中煤科工开采研究院有限公司 天地(常州)自动化股份有限公司 中煤科工集团常州研究院有限公司
技术研发日:2022.09.30
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。