1.本发明涉及植球机技术领域,具体的说是一种全自动植球机。
背景技术:
2.芯片植球是芯片加工中的一道重要的工序,通过对芯片的植球能够改善芯片的电热性能,有利于保护芯片,且芯片植球可以是信号传输延迟减小,传输信号适应频率大大提高,且可以共面焊接,这要使芯片的可靠性、稳定性、安全性大大提高,芯片植球可以通过芯片植球机完成。
3.然而,传统植球机在使用的过程中需要工作人员将芯片放置在放置盘上然后放置盘进入到植球机的内部自动完成植球,当一次植球完成后需要停机一段时间将植球完成的芯片从植球机上取下并将放置有未进行植球的芯片的放置盘放置到植球机上进行植球,如此需要浪费一定的时间,不便于在不停机的情况下连续的进行植球,从而提高了加工的时间,降低了加工的效率,且在植球时金属球大多堆积在植球板的一侧,因此当需要对植球板进行检修时需要手动多次将金属球从植球板的内部取出,不便于一次性取出,较为浪费时间。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种全自动植球机。
5.本发明解决其技术问题所采用的技术方案是:一种全自动植球机,包括机架,所述机架上设有推料结构,所述机架上设有移位结构,所述机架上设有定位结构,所述机架上设有移动结构,所述机架上设有固定结构,所述固定结构上设有下料结构,所述下料结构上设有挡料结构,所述机架上设有驱动结构,所述机架上安装有植球板,所述机架上放置有放置盘;所述移位结构包括滑板,所述机架上滑动连接有滑板,所述机架上固定连接有支撑板,所述支撑板上固定连接有第一齿条,所述滑板上固定连接有第二齿条,所述支撑板上滑动连接有滑架,所述滑架上转动连接有第一齿轮,所述第一齿轮的一侧与第一齿条之间啮合且另一侧与第二齿条之间啮合,所述滑架与支撑板之间固定连接有第一弹簧。
6.具体的,所述滑板截面一端的宽度小于另一端的宽度,所述支撑板的截面呈u形结构。
7.具体的,所述推料结构包括气缸,所述机架上安装有气缸,所述气缸上固定连接有推板,所述推板上固定连接有推杆。
8.具体的,所述移动结构包括导向板,所述机架上固定连接有导向板,所述机架上安装有第一电机,所述第一电机的输出轴上通过联轴器连接有第一丝杆,所述第一丝杆上螺纹连接有第一滑块,所述第一滑块滑动连接于导向板,所述第一滑块上固定连接有导向杆,所述导向板上设有两个导向槽且滑动连接有衔接板,所述衔接板的两端延伸至两个导向槽的内部,所述衔接板上固定连接有导向块,所述导向块滑动连接于导向杆。
9.具体的,所述定位结构包括承载板,所述衔接板上固定连接有承载板,所述承载板上滑动连接有两个夹板,其中一个所述夹板上固定连接有顶杆,所述顶杆抵触于滑板,所述夹板上固定连接有第三齿条,所述承载板上转动连接有第二齿轮,所述第二齿轮的两侧分别与第三齿条之间啮合,所述第三齿条与承载板之间抵触有第二弹簧,所述夹板上滑动连接有定位块,所述定位块与夹板之间固定连接有第三弹簧。
10.具体的,所述下料结构包括装料斗,所述植球板上放置有装料斗,所述装料斗的底端滑动连接有移动框,所述移动框上滑动连接有滑框,所述滑框与移动框之间抵触有多个第四弹簧,所述滑框上固定连接有顶块。
11.具体的,所述固定结构包括限位板,所述机架上滑动连接有两个限位板,所述装料斗上固定连接有两个卡板,所述限位板与卡板之间卡合,所述机架上转动连接有两个转杆,所述转杆与限位板之间抵触。
12.具体的,所述挡料结构包括挡料板,所述装料斗上滑动连接有挡料板,所述挡料板上滑动连接有卡杆,所述卡杆与挡料板之间抵触有第五弹簧,所述挡料板上滑动连接有挡块,所述挡块与挡料板之间固定连接有第六弹簧,所述挡料板与装料斗之间固定连接有第七弹簧,所述装料斗上滑动连接有第二滑块,所述第二滑块抵触于顶块,所述第二滑块与装料斗之间抵触有第八弹簧。
13.具体的,所述挡块的截面呈l形结构,所述顶块截面的一端呈梯形结构。
14.具体的,所述驱动结构包括外框,所述机架上安装有外框,所述外框上滑动连接有第三滑块,所述第三滑块与移动框之间卡合,所述外框上转动连接有第二丝杆,所述第二丝杆与第三滑块之间螺纹连接,所述外框上安装有第二电机,所述第二电机的输出轴上通过联轴器连接有第二丝杆。
15.本发明的有益效果是:(1)本发明所述的一种全自动植球机,当需要对芯片进行植球时通过将多个芯片放置到放置盘上,并将放置盘放置到机架上,此时便可通过推料结构推动放置盘,推料结构在推动放置盘运动的过程中会带动移位结构进行运动,且移位结构的运动速度大于推料结构的运动速度,当移位结构与定位结构之间脱离后定位结构会朝向放置盘移动,从而实现自动的对放置盘进行定位固定,从而有效的避免手动的固定,接着便可通过移动结构将定位结构移动至植球机的内部进行植球,在此过程中推料结构复位,此时便可将放置有未植球芯片的放置盘放置到机架上,当植球完成后定位结构会在移动结构的作用下复位,定位结构在复位的过程中会与移位结构抵触,从而使定位结构自动的解除对放置盘的定位,接着推料结构再次启动进行下一次的推料,如此只需要工作人员不断地将装有未植球芯片的放置盘放置到机架上并并将装有已植球芯片的放置盘从机架上取下,中途不需要停机,从而节省了时间,提高了效率。
16.(2)本发明所述的一种全自动植球机,通过将芯片植球用的金属球放置到下料结构的内部,在植球的过程中通过驱动结构使下料结构在植球板上运动,当下料结构在运动的过程中能够通过挡料结构对下料结构内部的金属球进行抵挡,从而避免下料结构内部金属球的漏出,且当一次植球完成后,下料结构会复位,此时挡料结构会自动复位,从而使下料结构底端被消耗的金属球得到补充,从而便于下一次的植球。
17.(3)本发明所述的一种全自动植球机,当需要对植球板进行更换或者检修时可以
使固定结构不对下料结构进行固定,并将固定结构从机架上取下,此时便可将下料结构从植球板上取下,下料结构在取出的过程中金属球会一起被取出,从而有效的避免了需要多次手动的将金属球从植球板上取出,当下料结构取下后再将驱动结构从机架上取下,接着便可将植球板从机架上拆卸下来进行检修与更换。
附图说明
18.下面结合附图和实施例对本发明进一步说明。
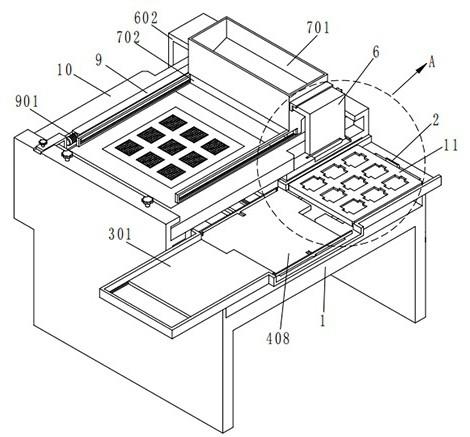
19.图1为本发明提供的一种全自动植球机的一种较佳实施例的整体结构的结构示意图;图2为图1所示的a部结构放大示意图;图3为图2所示的b部结构放大示意图;图4为本发明的卡板与装料斗的连接结构示意图;图5为本发明的第一电机与第一丝杆的连接结构示意图;图6为图5所示的c部结构放大示意图;图7为图5所示的d部结构放大示意图;图8为本发明的机架与滑板的连接结构示意图;图9为图8所示的e部结构放大示意图;图10为本发明的机架与承载板的连接结构示意图;图11为本发明的装料斗与移动框的连接结构示意图;图12为图11所示的f部结构放大示意图;图13为图12所示的g部结构放大示意图。
20.图中:1、机架;2、推料结构;201、气缸;202、推板;203、推杆;3、移位结构;301、滑板;302、支撑板;303、第一齿条;304、第二齿条;305、滑架;306、第一齿轮;307、第一弹簧;4、定位结构;401、顶杆;402、夹板;403、第三齿条;404、第二齿轮;405、第二弹簧;406、定位块;407、第三弹簧;408、承载板;5、移动结构;501、第一电机;502、第一丝杆;503、导向板;504、第一滑块;505、导向杆;506、导向块;507、衔接板;508、导向槽;6、固定结构;601、转杆;602、限位板;603、卡板;7、下料结构;701、装料斗;702、移动框;703、滑框;704、第四弹簧;705、顶块;8、挡料结构;801、挡料板;802、卡杆;803、第五弹簧;804、挡块;805、第六弹簧;806、第七弹簧;807、第二滑块;808、第八弹簧;9、驱动结构;901、第二电机;902、第二丝杆;903、第三滑块;904、外框;10、植球板;11、放置盘。
具体实施方式
21.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
22.如图1-13所示,本发明所述的一种全自动植球机包括机架1,所述机架1上设有推料结构2,所述机架1上设有移位结构3,所述机架1上设有定位结构4,所述机架1上设有移动结构5,所述机架1上设有固定结构6,所述固定结构6上设有下料结构7,所述下料结构7上设有挡料结构8,所述机架1上设有驱动结构9,所述机架1上安装有植球板10,所述机架1上放置有放置盘11;
具体的,所述移位结构3包括滑板301,所述机架1上滑动连接有滑板301,所述机架1上固定连接有支撑板302,所述支撑板302上固定连接有第一齿条303,所述滑板301上固定连接有第二齿条304,所述支撑板302上滑动连接有滑架305,所述滑架305上转动连接有第一齿轮306,所述第一齿轮306的一侧与第一齿条303之间啮合且另一侧与第二齿条304之间啮合,所述滑架305与支撑板302之间固定连接有第一弹簧307,所述滑板301截面一端的宽度小于另一端的宽度,所述支撑板302的截面呈u形结构,所述推料结构2包括气缸201,所述机架1上安装有气缸201,所述气缸201上固定连接有推板202,所述推板202上固定连接有推杆203,所述移动结构5包括导向板503,所述机架1上固定连接有导向板503,所述机架1上安装有第一电机501,所述第一电机501的输出轴上通过联轴器连接有第一丝杆502,所述第一丝杆502上螺纹连接有第一滑块504,所述第一滑块504滑动连接于导向板503,所述第一滑块504上固定连接有导向杆505,所述导向板503上设有两个导向槽508且滑动连接有衔接板507,所述衔接板507的两端延伸至两个导向槽508的内部,所述衔接板507上固定连接有导向块506,所述导向块506滑动连接于导向杆505,所述定位结构4包括承载板408,所述衔接板507上固定连接有承载板408,所述承载板408上滑动连接有两个夹板402,其中一个所述夹板402上固定连接有顶杆401,所述顶杆401抵触于滑板301,所述夹板402上固定连接有第三齿条403,所述承载板408上转动连接有第二齿轮404,所述第二齿轮404的两侧分别与第三齿条403之间啮合,所述第三齿条403与承载板408之间抵触有第二弹簧405,所述夹板402上滑动连接有定位块406,所述定位块406与夹板402之间固定连接有第三弹簧407,在植球机植球的过程中可以将装有未植球芯片的放置盘11放置到机架1上,当一次植球完成后第一电机501的输出轴会转动带动第一丝杆502转动,第一丝杆502转动会螺纹驱动第一滑块504在导向板503上滑动,第一滑块504会带动导向杆505运动,此时由于导向槽508呈竖直状态,因此导向杆505运动会通过导向块506带动衔接板507做竖直方向上的背离于植球板10的运动,当衔接板507运动至导向槽508的拐弯处时此时第一滑块504继续运动会带动衔接板507与承载板408做水平方向的运动,承载板408在运动的过程中顶杆401会与滑板301之间抵触,此时顶杆401会带动其中一个夹板402背离于放置盘11运动,其中一个夹板402会通过第三齿条403与第二齿轮404带动另一个夹板402做方向相反的同步运动,当承载板408的一侧与机架1之间抵触时此时两个夹板402完全与放置盘11之间脱离,此时气缸201收缩带动推板202运动,推板202运动会推动装有未植球芯片的放置盘11运动,装有未植球芯片的放置盘11运动会推动装有已植球芯片的放置盘11运动,从而使装有已植球芯片的放置盘11运动至滑板301上,在推板202运动的过程中推杆203会与滑架305之间抵触,此时第一弹簧307收缩,滑架305运动会带动第一齿轮306运动,由于第一齿条303的作用第一齿轮306在运动的过程中会发生转动,从而使第二齿条304运动的速度大于第一齿轮306运动的速度,从而使滑板301运动的速度大于推板202运动的速度,从而使两个放置盘11之间出现缝隙,随着滑板301的运动滑板301将会与顶杆401之间不抵触,此时在第二弹簧405的作用下两个夹板402会相互靠拢至两者之间的距离刚好等于放置盘11的宽度,此时由于夹板402的端部呈l形结构,因此当装有未植球芯片的放置盘11在运动的过程中会与夹板402的端部之间抵触,此时气缸201停止收缩且定位块406在第三弹簧407的作用下从夹板402的内部滑出实现对放置盘11的定位,从而完成放置盘11的自动固定,接着第一电机501的输出轴会反向转动使承载板408运动至植球机的内部进行植球,当承载板408运动至植球机的内部后气缸201
复位,此时滑板301会在第一弹簧307的作用下复位,接着便可将装有已植球芯片的放置盘11从机架1上取下并将装有未植球芯片的放置盘11放置到机架1上,从而工作人员只需要不断地取放放置盘11,便可实现全自动化的植球,中途不需要停机,从而节省了时间,提高了效率。
23.具体的,所述下料结构7包括装料斗701,所述植球板10上放置有装料斗701,所述装料斗701的底端滑动连接有移动框702,所述移动框702上滑动连接有滑框703,所述滑框703与移动框702之间抵触有多个第四弹簧704,所述滑框703上固定连接有顶块705,所述挡料结构8包括挡料板801,所述装料斗701上滑动连接有挡料板801,所述挡料板801上滑动连接有卡杆802,所述卡杆802与挡料板801之间抵触有第五弹簧803,所述挡料板801上滑动连接有挡块804,所述挡块804与挡料板801之间固定连接有第六弹簧805,所述挡料板801与装料斗701之间固定连接有第七弹簧806,所述装料斗701上滑动连接有第二滑块807,所述第二滑块807抵触于顶块705,所述第二滑块807与装料斗701之间抵触有第八弹簧808,所述挡块804的截面呈l形结构,所述顶块705截面的一端呈梯形结构,所述驱动结构9包括外框904,所述机架1上安装有外框904,所述外框904上滑动连接有第三滑块903,所述第三滑块903与移动框702之间卡合,所述外框904上转动连接有第二丝杆902,所述第二丝杆902与第三滑块903之间螺纹连接,所述外框904上安装有第二电机901,所述第二电机901的输出轴上通过联轴器连接有第二丝杆902,即:在植球的过程中芯片上的植球凹槽会与植球板10上的多个孔洞之间对齐,且两者之间没有缝隙,此时通过启动第二电机901,第二电机901的输出轴转动带动第二丝杆902转动,第二丝杆902转动会螺纹驱动第三滑块903在外框904上滑动,第三滑块903会带动移动框702在装料斗701上滑动,移动框702在运动的过程中会通过挡块804带动卡杆802与挡料板801运动,第七弹簧806收缩,当挡料板801的一侧运动至与装料斗701之间抵触时,此时第二滑块807在第八弹簧808的作用下会朝向卡杆802运动并抵触卡杆802背离于移动框702运动,第五弹簧803收缩,此时挡块804会在移动框702的作用下运动一小段距离,第六弹簧805伸长,当卡杆802完全从移动框702上脱离时此时移动框702继续运动,挡料板801在第二滑块807的作用下无法复位,从而从使挡料板801能够对装料斗701中的金属球进行抵挡,从而有效的避免了移动框702从装料斗701移出后金属球从装料斗701的底端漏出,当移动框702完全从装料斗701的内部移出后第四弹簧704会伸长带动滑框703运动一段距离,从而避免了金属球在植球的过程中从移动框702上溢出,从而提高了稳定性,当移动框702经过植球板10上的通孔时移动框702内部的金属球会通过植球板10上的通孔落入到芯片上,从而完成芯片的植球,当植球完成后移动框702复位,在移动框702复位的过程中在装料斗701的抵触下滑框703会收在移动框702的内部,且顶块705会和第二滑块807之间抵触,从而使第二滑块807背离于挡料板801运动并与第二滑块807之间不卡合,此时挡料板801在第七弹簧806的作用下会复位,此时金属球会从装料斗701流入到移动框702对消耗的金属球进行补充,从而便于下一次的植球。
24.具体的,所述固定结构6包括限位板602,所述机架1上滑动连接有两个限位板602,所述装料斗701上固定连接有两个卡板603,所述限位板602与卡板603之间卡合,所述机架1上转动连接有两个转杆601,所述转杆601与限位板602之间抵触,即:当需要对植球板10进行检修或者更换时通过转动转杆601,当转杆601与限位板602之间不抵触时便可背离于卡板603滑动限位板602,使限位板602与卡板603之间不卡合,继续滑动限位板602使限位板
602从机架1上脱离,重复上述操作使另一个限位板602也从机架1上脱离,此时便可将装料斗701从植球板10上取下,装在装料斗701内部的金属球会一起被取下,从而避免了需要手动多次的将金属球从植球板10上取出,节省了时间,提高了效率,当装料斗701取出后便可将外框904从机架1上拆卸下来,当外框904拆卸下来后便可将植球板10取下进行检修与更换。
25.本发明在使用时,在植球机植球的过程中可以将装有未植球芯片的放置盘11放置到机架1上,当一次植球完成后第一电机501的输出轴会转动带动第一丝杆502转动,第一丝杆502转动会螺纹驱动第一滑块504在导向板503上滑动,第一滑块504会带动导向杆505运动,此时由于导向槽508呈竖直状态,因此导向杆505运动会通过导向块506带动衔接板507做竖直方向上的背离于植球板10的运动,当衔接板507运动至导向槽508的拐弯处时此时第一滑块504继续运动会带动衔接板507与承载板408做水平方向的运动,承载板408在运动的过程中顶杆401会与滑板301之间抵触,此时顶杆401会带动其中一个夹板402背离于放置盘11运动,其中一个夹板402会通过第三齿条403与第二齿轮404带动另一个夹板402做方向相反的同步运动,当承载板408的一侧与机架1之间抵触时此时两个夹板402完全与放置盘11之间脱离,此时气缸201收缩带动推板202运动,推板202运动会推动装有未植球芯片的放置盘11运动,装有未植球芯片的放置盘11运动会推动装有已植球芯片的放置盘11运动,从而使装有已植球芯片的放置盘11运动至滑板301上,在推板202运动的过程中推杆203会与滑架305之间抵触,此时第一弹簧307收缩,滑架305运动会带动第一齿轮306运动,由于第一齿条303的作用第一齿轮306在运动的过程中会发生转动,从而使第二齿条304运动的速度大于第一齿轮306运动的速度,从而使滑板301运动的速度大于推板202运动的速度,从而使两个放置盘11之间出现缝隙,随着滑板301的运动滑板301将会与顶杆401之间不抵触,此时在第二弹簧405的作用下两个夹板402会相互靠拢至两者之间的距离刚好等于放置盘11的宽度,此时由于夹板402的端部呈l形结构,因此当装有未植球芯片的放置盘11在运动的过程中会与夹板402的端部之间抵触,此时气缸201停止收缩且定位块406在第三弹簧407的作用下从夹板402的内部滑出实现对放置盘11的定位,从而完成放置盘11的自动固定,接着第一电机501的输出轴会反向转动使承载板408运动至植球机的内部进行植球,当承载板408运动至植球机的内部后气缸201复位,此时滑板301会在第一弹簧307的作用下复位,接着便可将装有已植球芯片的放置盘11从机架1上取下并将装有未植球芯片的放置盘11放置到机架1上,从而工作人员只需要不断地取放放置盘11,便可实现全自动化的植球,中途不需要停机,从而节省了时间,提高了效率;在植球的过程中芯片上的植球凹槽会与植球板10上的多个孔洞之间对齐,且两者之间没有缝隙,此时通过启动第二电机901,第二电机901的输出轴转动带动第二丝杆902转动,第二丝杆902转动会螺纹驱动第三滑块903在外框904上滑动,第三滑块903会带动移动框702在装料斗701上滑动,移动框702在运动的过程中会通过挡块804带动卡杆802与挡料板801运动,第七弹簧806收缩,当挡料板801的一侧运动至与装料斗701之间抵触时,此时第二滑块807在第八弹簧808的作用下会朝向卡杆802运动并抵触卡杆802背离于移动框702运动,第五弹簧803收缩,此时挡块804会在移动框702的作用下运动一小段距离,第六弹簧805伸长,当卡杆802完全从移动框702上脱离时此时移动框702继续运动,挡料板801在第二滑块807的作用下无法复位,从而从使挡料板801能够对装料斗701中的金属球进行抵挡,从而
有效的避免了移动框702从装料斗701移出后金属球从装料斗701的底端漏出,当移动框702完全从装料斗701的内部移出后第四弹簧704会伸长带动滑框703运动一段距离,从而避免了金属球在植球的过程中从移动框702上溢出,从而提高了稳定性,当移动框702经过植球板10上的通孔时移动框702内部的金属球会通过植球板10上的通孔落入到芯片上,从而完成芯片的植球,当植球完成后移动框702复位,在移动框702复位的过程中在装料斗701的抵触下滑框703会收在移动框702的内部,且顶块705会和第二滑块807之间抵触,从而使第二滑块807背离于挡料板801运动并与第二滑块807之间不卡合,此时挡料板801在第七弹簧806的作用下会复位,此时金属球会从装料斗701流入到移动框702对消耗的金属球进行补充,从而便于下一次的植球,当需要对植球板10进行检修或者更换时通过转动转杆601,当转杆601与限位板602之间不抵触时便可背离于卡板603滑动限位板602,使限位板602与卡板603之间不卡合,继续滑动限位板602使限位板602从机架1上脱离,重复上述操作使另一个限位板602也从机架1上脱离,此时便可将装料斗701从植球板10上取下,装在装料斗701内部的金属球会一起被取下,从而避免了需要手动多次的将金属球从植球板10上取出,节省了时间,提高了效率,当装料斗701取出后便可将外框904从机架1上拆卸下来,当外框904拆卸下来后便可将植球板10取下进行检修与更换。
26.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
27.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。