1.本发明涉及道路损伤检测技术领域,尤其涉及一种随车移动式道路结构损伤快速检测装置。
背景技术:
2.道路在长时间使用后,由于车辆的荷载等多种因素,会导致公路的表面出现裂痕或者开裂等损伤,若不及时处理,容易存在安全隐患,所以在道路的日常养护中,需要对道路表面的状况进行检测;在检测时,通常采用图像检测的方式,对道路的裂痕部位进行检测。
3.经检索,中国专利(公开号:cn112709180a)公开了一种多功能的道路桥梁混凝土结构实时检测装置,该专利包括横梁,支撑架,机架,移动杆,移动脚轮,控制面板,集尘箱,集尘芯,支撑管,清理箱盖和排气网,所述的横梁横向螺栓连接在支撑架之间的上端;所述的支撑架均纵向下端螺栓连接在机架的上部左右两侧。
4.在现有技术中,在对道路进行检测时,在去除道路表面的灰尘时,同样需要去除表面的颗粒物体,避免对检测的机构和检测数据造成影响,并且在检测时,若道路的损坏部位垂直角度过大,则检测结构与道路的连接部位容易受到损伤。
技术实现要素:
5.本发明的目的在于:为了提高道路损伤的检测质量,而提出的一种随车移动式道路结构损伤快速检测装置。
6.为了实现上述目的,本发明采用了如下技术方案:一种随车移动式道路结构损伤快速检测装置,包括装载箱,所述装载箱的一侧安装有组装架,用于与检测车辆进行组装,且装载箱的另一侧安装有图像检测机构;组装架采用现有技术中任一成熟的连接结构,用于降低成本;所述装载箱靠近组装架的下侧安装有清洁机构,清洁机构的输出端在装载箱移动时,与地面接触,将装载箱移动路径上的颗粒杂质向侧边推动;所述装载箱内部的顶端安装有多轴移动机构,所述多轴移动机构的输出端安装有道路裂痕检测机构,所述道路裂痕检测机构的下侧安装有连接架,所述连接架的内部安装有多个裂痕接触结构;所述道路裂痕检测机构包括感应模块,各个所述裂痕接触结构的顶部和底部高度均相同,且均与感应模块以相同的高度进行接触;所述感应模块基于各个裂痕接触结构对道路的平整度和裂隙进行检测,获取道路状况信息;所述图像检测机构基于道路状况信息,在待机状态和开启状态之间进行切换,对道路进行图像检测。
7.进一步的,所述裂痕接触结构包括连接模块、连接件和接触件,所述连接件通过螺
旋弹簧杆与连接模块转动连接,所述接触件通过多个弹性件与连接件滑动连接,且接触件的顶部设置有球形的弹性部位,所述连接件在接触件的底部与道路裂隙边缘接触时,通过螺旋弹簧杆带动接触件进行可复位的转动,方便其与道路裂隙的边缘脱离。
8.进一步的,所述接触件位于连接件的上侧设置有侧突部位,多个弹性件的两端分别与接触件的侧突部位和连接件相连接;所述连接件的上表面安装有至少一组电磁吸附件,所述接触件侧突部位的下侧设置有与连接件对应的吸附件;在电磁吸附件启动时,将连接件通过压缩弹性件向下移动。
9.进一步的,所述接触件的底端安装有滚动件,用于与道路接触,在移动时,降低摩擦。
10.进一步的,所述连接架的内部开设有多个安装槽,多个裂痕接触结构分别安装在各个安装槽的内部;各个所述裂痕接触结构中连接模块的两侧与各个安装槽之间均开设有安装孔,同一侧边的安装孔之间贯穿安装有锁紧件。
11.进一步的,所述多轴移动机构包括与装载箱顶部相连接的水平驱动机构,所述水平驱动机构的输出端安装有至少一组第一气缸;通过水平驱动机构和第一气缸,可以将道路裂痕检测机构和连接架水平从装载箱内移出,从而方便对裂痕接触结构进行更换。
12.进一步的,所述道路裂痕检测机构包括设备箱,所述设备箱的内部安装有多个第二气缸,所述感应模块的上表面对多个第二气缸的输出端相连接,且感应模块的上表面与设备箱之间安装有至少一组约束架,在感应模块移动时,对其进行支撑和约束。
13.进一步的,所述感应模块设置有压力波动阈值;在裂痕接触结构的底端移动至道路裂隙的上侧时,裂痕接触结构的顶端减少或者取消与感应模块的接触,感应模块基于裂痕接触结构产生的压力数据波动减少或者消失,其数据小于压力波动阈值;在裂痕接触结构的底端移动至道路凸起的部位时,裂痕接触结构的顶端增大与感应模块之间的接触,其数据大于压力波动阈值;或在道路凸起部位角度较大时,裂痕接触结构中的接触件基于螺旋弹簧杆进行转动,其数据小于压力波动阈值;在感应模块实际产生的压力数据与压力波动阈值不在相同的范围内时,图像检测机构启动进行图像检测。
14.进一步的,所述清洁机构包括收纳箱,所述收纳箱的内部设置有两组转动带,两组转动带均与支撑架相连接,所述支撑架的侧面与收纳箱之间安装有多个第三气缸;两组转动带以收纳箱中轴线为中心向两侧倾斜。
15.进一步的,所述图像检测机构包括投射单元、识别单元、补光单元和转向单元;所述投射单元基于道路状况信息将不同规格的激光网格投射至道路的路面上侧;所述识别单元用于识别道路的灰度信息,获取路况偏差信息,并且在投射单元启动时,对投射单元的激光网格进行识别,获取道路裂隙数据;所述补光单元用于在道路光线低于亮度阈值时,自动启动对道路进行照明,对其进行补光,从而方便识别单元进行工作;所述转向单元在投射单元、识别单元和补光单元集成设置时,对其进行角度调节,
从而提高图像检测机构的工作范围。
16.进一步的,所述激光网格包括四组规格;ⅰ级规格,激光网格之间的空隙尺寸为2cm*0.5cm,对应道路裂隙的长度为1-10cm,宽度为1-2.5cm;ⅱ级规格,激光网格之间的空隙尺寸为4cm*1cm,对应道路裂隙的长度为10-30cm,宽度为2.5-5cm;ⅲ级规格,激光网格之间的空隙尺寸为8cm*2cm,对应道路裂隙的长度为30-60cm,宽度为5-8cm;ⅳ级规格,激光网格之间的空隙尺寸为15cm*3cm,对应道路裂隙的长度为60-120cm,宽度为8-13cm;在道路裂隙长度或宽度任一达到对应的界限后,激光网格的等级上升一级。
17.进一步的,在道路裂隙长度或宽度任一超过ⅳ级规格后,图像检测机构通过gps进行定位,获取地理数据,并且将地理数据和对应的道路状况信息进行传输;接收相关数据的设备为控制台、主机或移动设备中的任一或多组组合。
18.综上所述,由于采用了上述技术方案,本发明的有益效果是:本技术通过清洁机构,可以在装载箱随检测车辆移动时,将路面的颗粒杂质向侧边清理,避免对道路裂痕检测机构的检测造成影响,进而可以提高检测的质量;另一方面,采用裂痕接触结构与道路裂痕检测机构结合进行检测时,若裂隙或者道路的倾斜度过大,则裂痕接触结构中的接触件自身可发生旋转,避免因应力过大,导致接触件损毁的问题,进而可以提高接触件的使用寿命;进一步,各个裂痕接触结构与连接架为分离式结构,在个别裂痕接触结构出现损伤时,可以进行单独的更换,从而可以降低使用成本;同时,本技术通过图像检测机构,可以协同道路裂痕检测机构对路面进行检测,在道路裂痕检测机构检测到路面的异常信息时,其内部的投射单元启动,在未识别时,处于待机状态,从而可以降低能耗;并且投射单元基于不同的道路状况信息,可以将不同规格的激光网格进行投射,从而可以获取较高的精度和检测范围。
附图说明
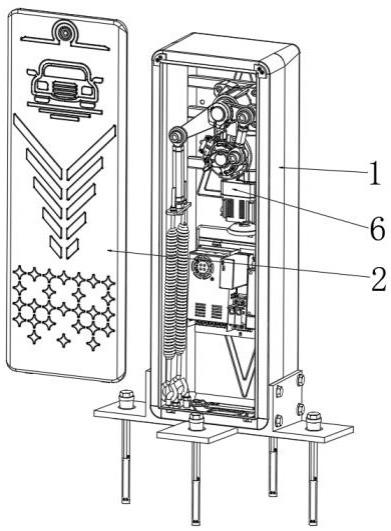
19.图1为本发明的结构示意图;图2为本发明中装载箱的侧剖视图;图3为本发明图2中a部分的结构放大图;图4为本发明中连接架的局部俯剖视图;图5为本发明清洁机构的底视图。
20.图例说明:1、装载箱;2、组装架;3、清洁机构;4、多轴移动机构;5、道路裂痕检测机构;6、连接架;7、裂痕接触结构;8、图像检测机构;41、水平驱动机构;42、第一气缸;51、设备箱;52、第二气缸;53、约束架;54、感应模块;71、连接模块;72、螺旋弹簧杆;73、接触件;74、弹性件;75、滚动件;76、电磁吸附件;77、连接件;31、收纳箱;32、第三气缸;33、支撑架;34、转动带;
61、安装槽;62、锁紧件。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
22.请参阅图1-5,本发明提供一种随车移动式道路结构损伤快速检测装置,包括装载箱1,装载箱1的一侧安装有组装架2,用于与检测车辆进行组装,且装载箱1的另一侧安装有图像检测机构8;装载箱1靠近组装架2的下侧安装有清洁机构3,清洁机构3的输出端在装载箱1移动时,与地面接触,将装载箱1移动路径上的颗粒杂质向侧边推动;装载箱1内部的顶端安装有多轴移动机构4,多轴移动机构4的输出端安装有道路裂痕检测机构5,道路裂痕检测机构5的下侧安装有连接架6,连接架6的内部安装有多个并排分布的裂痕接触结构7;多轴移动机构4包括与装载箱1顶部相连接的水平驱动机构41,水平驱动机构41的输出端安装有至少一组第一气缸42;通过水平驱动机构41和第一气缸42,可以将道路裂痕检测机构5和连接架6水平从装载箱1内移出,从而方便对裂痕接触结构7进行更换;道路裂痕检测机构5包括感应模块54,各个裂痕接触结构7的顶部高度相同,且均与感应模块54以相同的高度进行接触;道路裂痕检测机构5包括设备箱51,设备箱51的内部安装有多个第二气缸52,感应模块54的上表面对多个第二气缸52的输出端相连接,且感应模块54的上表面与设备箱51之间安装有至少一组约束架53,在感应模块54移动时,对其进行支撑和约束。
23.感应模块54基于各个裂痕接触结构7对道路的平整度和裂隙进行检测,获取道路状况信息;图像检测机构8基于道路状况信息,在待机状态和开启状态之间进行切换;图像检测机构8包括投射单元、识别单元、补光单元和转向单元;在图像检测机构8处于开启状态后,投射单元基于道路状况信息将不同规格的激光网格投射至道路的路面上侧;识别单元用于识别道路的灰度信息,获取路况偏差信息,并且在投射单元启动时,对投射单元的激光网格进行识别,获取道路裂隙数据;补光单元用于在道路光线低于亮度阈值时,自动启动对道路进行照明,对其进行补光,从而方便识别单元进行工作;转向单元在投射单元、识别单元和补光单元集成设置时,对其进行角度调节,从而提高图像检测机构8的工作范围。
24.请参阅图3-4,裂痕接触结构7包括连接模块71、连接件77和接触件73,连接件77通过螺旋弹簧杆72与连接模块71转动连接,接触件73通过多个弹性件74与连接件77滑动连接,连接件77在接触件73的底部与道路裂隙边缘接触时,通过螺旋弹簧杆72带动接触件73
进行可复位的转动,方便其与道路裂隙的边缘脱离,避免接触件73与道路裂隙边缘之间的应力较大,导致损伤的问题;接触件73位于连接件77的上侧设置有侧突部位,多个弹性件74的两端分别与接触件73的侧突部位和连接件77相连接;并且接触件73的顶部设置有球形的弹性部位,用于在感应模块54与接触件73本体之间形成弹性区域,提供压力变换的同时,避免对感应模块54造成损伤;连接件77的上表面安装有至少一组电磁吸附件76,接触件73侧突部位的下侧设置有与连接件77对应的吸附件;在电磁吸附件76启动时,将连接件77通过压缩弹性件74向下移动;在连接件77基于螺旋弹簧杆72带动接触件73转动时,避免因接触件73的顶端与感应模块54的边缘出现卡顿的问题,并且在螺旋弹簧杆72带动连接件77复位后,电磁吸附件76停止工作,接触件73基于弹性件74,重新抵接在感应模块54的下侧。
25.接触件73的底端安装有滚动件75,用于与道路接触,在移动时,降低摩擦。
26.连接架6的内部开设有多个安装槽61,多个裂痕接触结构7分别安装在各个安装槽61的内部;各个裂痕接触结构7中连接模块71的两侧与各个安装槽61之间均开设有安装孔,同一侧边的安装孔之间贯穿安装有锁紧件62,用于将裂痕接触结构7固定在对应的安装槽61内部。
27.请参阅图5,清洁机构3包括收纳箱31,收纳箱31的内部设置有两组转动带34,两组转动带34均与支撑架33相连接,支撑架33的侧面与收纳箱31之间安装有多个第三气缸32;两组转动带34以收纳箱31中轴线为中心向两侧倾斜。
28.实施例1在此实施例中,转动带34采用两组循环转动的带体结构,包括多个驱动辊,驱动辊的外侧套设有带体,两组带体结构均朝向收纳箱31的两侧倾斜,并且一组带体结构朝向收纳箱31中间部位的一端位于另一端带体结构相同结构的前侧,并且两组带体结构之间具有重叠的部位;在组装时,将组装架2与检测车辆进行组装;在裂痕接触结构7的下侧铺设水平的校准板,同时启动第一气缸42,将道路裂痕检测机构5、连接架6和裂痕接触结构7进行下降,直至各个裂痕接触结构7均与校准板接触;随后启动第二气缸52将感应模块54下降,感应模块54下降时将裂痕接触结构7中的接触件73向下按压,将校准板与裂痕接触结构7分离,通过压缩弹性件74和球形件产生初始读数a1;在车辆行驶时,启动第三气缸32,将支撑架33和转动带34下降,直至转动带34与路面接触,同时两组带体结构启动,其侧面的带体分别向收纳箱31的两侧转动,将路面表面的颗粒杂质进行清理;接触件73通过滚动件75持续与路面接触,产生实时数据a2,a2与a1对比得到实时压力数据波动,并将其与感应模块54内设置的压力波动阈值进行对比;在经过某一段路段时,感应模块54基于个别裂痕接触结构7产生的压力数据波动出现减少的趋势,直至感应模块54与个别裂痕接触结构7之间的压力数据消失,随后重新产生位于压力波动阈值内的实时压力数据波动,通过将最先一组和最后一组出现异常压力数
据裂痕接触结构7的持续时间与车速进行计算,获取该处路面的宽度为4.3cm,产生异常压力数据的两侧最边缘裂痕接触结构7的间距为17cm,感应模块54生成具有开启ⅱ级规格激光网格信号的道路状况信息,并将其传输至图像检测机构8;图像检测机构8读取该道路状况信息后,启动投射单元,将激光网格以4cm*1cm的尺寸进行投射,同时识别单元进行识别,经识别,该道路裂隙覆盖了7组纵向激光和3组横向的激光,经计算,获得该道路裂隙的尺寸为28cm*3cm。
29.实施例2在此实施例中,获取该处路面的宽度为12.5cm,产生异常压力数据的两侧最边缘裂痕接触结构7的间距为120cm,并且为裂痕接触结构7最大的检测间距,感应模块54生成具有开启ⅳ级规格激光网格信号的道路状况信息,并将其传输至图像检测机构8;图像检测机构8读取该道路状况信息后,启动投射单元,将激光网格以15cm*3cm 的尺寸进行投射,同时识别单元进行识别,经识别,该道路裂隙覆盖了10组纵向激光和2.5组横向的激光,经计算,获得该道路裂隙的尺寸为150cm*7.5cm,超过最大的检测道路裂隙范围;图像检测机构8通过gps进行定位,获取地理数据,并且将地理数据和对应的道路状况信息通过通讯网络进行传输;接收相关数据的设备为相关的控制台。
30.实施例3相较于实施例1,实施例2中的转动带34采用多个清洁辊,多个清洁辊采用人字形分布,各个清洁辊的转动方向为其倾斜的一侧。
31.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。