技术特征:
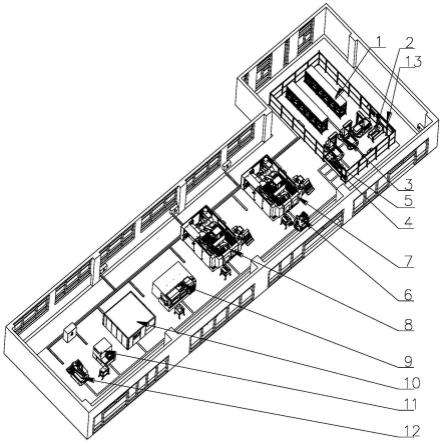
1.一种智能化生产无人环境作业产线,其特征在于:按生产、物料流转的操作过程设置有仓库区、由自动上下料机构和对接缓存台组成的对接缓存区,以及包括打标机和测量机在内的加工区;在对接缓存台上设置有托盘组件,在仓库区、自动上下料机构与对接缓存台之间运行有数台箱货agv,在加工区范围之内运行有数台复合agv;仓库区采用mes调度系统实施库位管理,由具备slam导航技术的箱货agv实施载有工件的托盘组件出入库、以及在对接缓存区转运加工指定的工件,箱货agv对接加工区转运的复合agv。2.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的自动上下料机构包括一型材框架组件,在型材框架组件上设置有由驱动组件驱动连接的移动工装;所述的驱动组件包括设置于型材框架组件上的无杆气缸和一组滑轨,无杆气缸的驱动端连接于移动工装,移动工装的底部设置有滑动套设于滑轨上的滑块;在型材框架组件与无杆气缸之间分别对应地设置有一组光电传感器和磁性开关。3.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的箱货agv包括agv车体,在agv车体固定安装有背篓组件和旋转托举货叉组件。4.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的对接缓存台包括型材框架,在型材框架上设置有数组支撑架,在每一组支撑架的两端分别对称地设置有限位块以支撑并限位托盘组件;在每一组支撑架上设置有光电开关以检测是否有托盘组件放置于支撑架上;在相邻两组支撑架之间、型材框架上设置有读码器以读取托盘组件的相关条码信息。5.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的托盘组件包括一托盘底板,在托盘底板上设置有数组用于支撑并定位成品件的定位销、成品件定位块、数组用于支撑并定位毛坯件的毛坯件定位块、以及二维码标牌;定位销顶部为上凸的柱状结构,成品件定位块设置有一组对称设置的v型定位槽以提供垂向支撑与定位,毛坯件定位块具有u型的开口槽以提供毛坯件一端的仿形夹持与定位。6.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的复合agv包括底部行走的agv小车,agv小车通过壳体和壳体顶部的缓存台安装协作机器人和抓手放置架;所述的协作机器人前端连接有快换盘安装板,在快换盘安装板上安装电动快换盘机器人端,在快换盘安装板一侧连接相机安装板和harting快插头安装板;在相机安装板上安装有光源灯和视觉相机,在harting快插头安装板上安装有对接电动抓手组件的harting快插头母头;所述的电动抓手组件具有电动夹爪本体,在电动夹爪本体前后端分别连接电动夹爪连接板和电动夹爪手指;在电动夹爪连接板后端连接电动快换盘抓手端和harting快插头公头,组装时电动快换盘抓手端与电动快换盘机器人端对接,harting快插头公头与harting快插头母头对接。7.根据权利要求6所述的智能化生产无人环境作业产线,其特征在于:所述的协作机器人,在其电动快换盘机器人端上设置有快换盘定位插槽;组装时,电动快换盘抓手端与快换盘定位插槽对接。
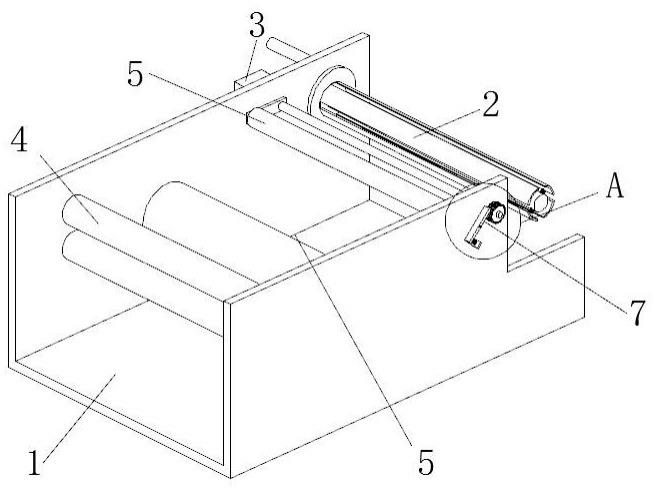
8.根据权利要求7所述的智能化生产无人环境作业产线,其特征在于:所述的抓手放置架具有型材架,型材架具有数组电动抓手组件的放置区间,每一放置区间具有两侧间隔柱体;在间隔柱体上设置有挡块和支撑块,在支撑块上设置有定位凹槽;放置时,电动抓手组件的夹爪定位轴对接嵌套于定位凹槽中。9.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的打标机包括工件定位工装、y向电动滑台和支撑型材框架,y向电动滑台的驱动端连接于工件定位工装以带动其沿三轴坐标系的y轴往复移动;在支撑型材框架上设置有读码器、相互连接的x向电动滑台、z向电动滑台;x向电动滑台的驱动端连接打标头;通过x向电动滑台和z向电动滑台的组合驱动,打标头可沿三轴坐标系的x轴和z轴往复移动;所述的工件定位工装具有数组成对排列的定位销和仿形定位块以支撑并定位体积较大的工件、一组夹爪气缸和由夹爪气缸连接驱动的至少一对夹块定位以支撑并定位六角棒型工件、以及一组导杆气缸和由导杆气缸连接驱动的至少一对压块以定位轴型工件。10.根据权利要求1所述的智能化生产无人环境作业产线,其特征在于:所述的测量机包括设置在测量机机柜上的测量定位夹具,测量定位夹具具有三轴方向上的支撑与定位结构。
技术总结
本申请提出一种智能化生产无人环境作业产线,提出一种加工区域无人作业的解决方案,通过集成复合式AGV与协作机器人代替人工操作,以期实现全流程自动对接所有加工机床及相应加工与缓存设备,达到智能化生产和作业调度全自动化,有效地提高工件加工生产效率、精细化水平和成品合格率。智能化生产无人环境作业产线包括按生产、物料流转的操作过程设置有仓库区、由自动上下料机构和对接缓存台组成的对接缓存区,以及包括打标机和测量机在内的加工区;在对接缓存台上设置有托盘组件,在仓库区、自动上下料机构与对接缓存台之间运行有数台箱货AGV,在加工区范围之内运行有数台复合AGV;仓库区采用MES调度系统实施库位管理。仓库区采用MES调度系统实施库位管理。仓库区采用MES调度系统实施库位管理。
技术研发人员:宋兴原 徐超 李骏飞 封俊翔 于辰曦
受保护的技术使用者:科捷智能科技股份有限公司
技术研发日:2022.09.29
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。