1.本实施新型涉及电机控制技术领域,尤其涉及一种电机控制装置、车辆中控设备和车辆。
背景技术:
2.随着科技的进步,控制器的研发技术越来越成熟。控制器是指按照预定顺序改变主电路或者控制电路的接线和改变电路中电阻值来控制电动机启动、调速、制动和反向的装置。
3.不同类型的电机的控制机制不同,而现有技术无法针对不同类型的电机实施对应的管理机制,导致热管理过程中的可靠性较差,是本领域技术人员亟待解决的技术难题。
技术实现要素:
4.本实施新型提供了一种电机控制装置、车辆中控设备和车辆,控制器能根据不同类型的电机输出相应的控制机制,实现了对不同类型的电机进行协同管理的效果。
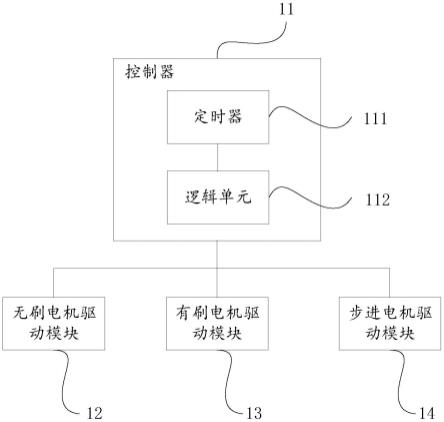
5.本实施新型实施例第一方面提供了一种电机控制装置,电机控制装置包括控制器,控制器连接有无刷电机驱动模块、有刷电机驱动模块以及步进电机驱动模块中的至少两种;
6.控制器包括至少两个逻辑单元和至少两个定时器;
7.定时器,用于通过一个通道生成pwm;
8.逻辑单元与定时器连接,用于对pwm进行处理得到三相互补pwm,并基于三相互补pwm对无刷电机驱动模块输出第一控制指令,以控制无刷电机转动;
9.控制器通过spi总线与有刷电机驱动模块连接,用于通过spi总线配置二相线路信号,以控制有刷电机转动;
10.控制器通过spi总线与步进电机驱动模块连接,用于通过spi总线配置使能信号,以控制步进电机转动。
11.本实施新型实施例第二方面提供了一种车辆中控设备,包括第一方面的电机控制装置。
12.本实施新型实施例第三方面提供了一种车辆,包括第一方面的电机控制装置。
13.上述电机控制装置、车辆中控设备和车辆,控制器包括至少两个逻辑单元和至少两个定时器,无刷电机驱动模块、有刷电机驱动模块和步进电机驱动模块均与控制器连接。控制器通过定时器和逻辑单元输出控制无刷电机的第一控制指令,通过spi总线配置控制有刷电机的二相线路信号,通过spi总线配置控制步进电机的使能信号。本实施新型中的控制器能根据不同类型的电机输出相应的控制机制,实现了对不同类型的电机进行协同管理的效果,从而解决了现有技术无法针对不同类型的电机实施对应的管理机制,导致热管理过程中的可靠性较差的技术问题。
附图说明
14.图1为本实施新型实施例提供的一种电机控制装置的结构示意图;
15.图2为本实施新型实施例提供的控制器的内部示意图;
16.图3为本实施新型实施例提供的一种电机控制装置的整体连接示意图;
17.图4为本实施新型实施例提供的一种车辆中控设备的结构示意图。
具体实施方式
18.下面将结合本实施新型实施例中的附图,对本实施新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实施新型一部分实施例,而不是全部的实施例。基于本实施新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实施新型保护的范围。
19.需要说明的是,本实施新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本实施新型的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列单元的系统、产品或设备不必限于清楚地列出的那些单元,而是可包括没有清楚地列出的或对于这些产品或设备固有的其它单元。
20.图1为本实施新型实施例提供的一种电机控制装置的结构示意图。请参照图1,为本实施新型实施例提供的一种电机控制装置,该电机控制装置包括:控制器11,控制器11连接有无刷电机驱动模块12、有刷电机驱动模块13以及步进电机驱动模块14中的至少两种;控制器11包括至少两个逻辑单元112和至少两个定时器111;定时器111,用于通过一个通道生成pwm;逻辑单元112与定时器111连接,用于对pwm进行处理得到三相互补pwm,并基于三相互补pwm对无刷电机驱动模块12输出第一控制指令,以控制无刷电机转动;控制器11通过spi总线与有刷电机驱动模块13连接,用于通过spi总线配置二相线路信号,以控制有刷电机转动;控制器11通过spi总线与步进电机驱动模块14连接,用于通过spi总线配置使能信号,以控制步进电机转动。
21.控制器11是指按照预定顺序改变主电路或控制电路的接线和改变电路中电阻值来控制电动机的启动、调速、制动和反向的主令装置。控制器11一般由程序计数器、指令寄存器、指令译码器、时序产生器和操作控制器组成,是发布命令的决策机构,以完成协调和指挥整个计算机系统的操作。定时器111是通信协议正常运行的基本要素之一,主要用于各种定时和帧重传的任务。逻辑单元112为用于完成用户需要实现的逻辑功能的最小单元。无刷电机驱动模块12、有刷电机驱动模块13和步进电机驱动模块14分别连接无刷电机、有刷电机和步进电机,用于驱动无刷电机、有刷电机和步进电机。无刷电机,即无刷直流电机,由电动机主体和驱动器组成,是一种典型的机电一体化产品。有刷电机为将电能转换成机械能或将机械能转换成电能的旋转电机。有刷电机是所有电机的基础,它具有启动快、制动及时、可在大范围内平滑地调速、控制电路相对简单等特点。spi总线,即全双工同步串行总线,是微处理控制单元和外围设备之间进行通信的同步串行端口。spi总线可以包括4条线,分别为串行时钟线、主机输入/从机输出数据线、主机输出/从机输入数据线和低电平有效的从机选择线。
22.图2为本实施新型实施例提供的控制器的内部示意图,如图2所示,本实施例中的控制器11可以包括至少两个逻辑单元112和至少两个定时器111。逻辑单元112内部集成有fpga(field programmable gate array,可编程阵列逻辑),逻辑单元112是完成用户需要实现的逻辑功能的最小单元。逻辑单元112在altera可编程逻辑器中叫作le,在xilnx可编程逻辑器中叫作lc。每个逻辑单元112可以包括3个lc,每个lc包括4个输入和输出。每个定时器111可以包括24个通道。定时器111中的一个通道可以生成pwm。pwm经过lc之后,生成出三相互补pwm。无刷电机的转动可以通过调节pwm控制。控制器11与无刷电机驱动模块12连接,控制器11可以基于生成的三相互补pwm对无刷电机驱动模块12输出控制无刷电机的第一控制指令,以控制无刷电机转动。
23.有刷电机的转动可以由二相分别输出不同的电平信号进行控制。控制器11通过spi总线与有刷电机驱动模块13连接,并可以通过spi总线在有刷电机驱动模块13内部的寄存器配置二相线路信号,以控制有刷电机转动。有刷电机驱动模块13的内部设有寄存器。通常情况下,控制器11一般需要对有刷电机驱动模块13内部的寄存器配置有刷电机的运行频率、工作模式等,以实现对有刷电机的控制。因此,本实施例中,控制器11可以通过spi总线在有刷电机驱动模块13内部的寄存器配置控制有刷电机转动的二相线路信号,从而通过有刷电机驱动模块13输出相应的二相线路信号控制有刷电机转动。
24.步进电机的转动和out引脚有关。控制器11通过spi总线与步进电机驱动模块14连接,可以通过spi总线在步进电机驱动模块14内部的寄存器配置使能信号,以控制步进电机。步进电机驱动模块14的内部设有寄存器。控制器一般需要对步进电机驱动模块14内部的寄存器配置步进电机的运行频率、工作模式等,以实现对有刷电机的控制。因此,本实施例中,控制器11可以通过spi总线在步进电机驱动模块14内部的寄存器配置控制步进电机转动的使能信号,从而通过步进电机驱动模块14控制步进电机转动。
25.在本实施例中,可选地,所述装置还包括can通信模块和lin通信模块;can通信模块通过can发送管脚和can接收管脚与控制器11连接,can接收管脚用于向控制器11发送第一数据,can发送管脚用于接收控制器11所发送的第二数据;lin通信模块通过lin发送管脚和lin接收管脚与控制器11连接,lin接收管脚用于向控制器11发送第三数据,lin发送管脚用于接收控制器11所发送的第四数据。
26.can(controller area network,控制器域网)是应用最广泛的现场总线之一。本实施例中的can通信模块,即can总线协议,已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以can为底层协议,专为大型货车和重工机械车辆设计的j1939协议,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强、振动大的工业环境。
27.lin(local interconnect network,局域互联网络)是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。lin通信模块,即lin总线协议为一种辅助的总线网络。在不需要can总线的带宽和多功能的场合下,比如智能传感器和制动装置之间的通讯使用lin总线协议可大大节省成本。
28.图3为本实施新型实施例提供的一种电机控制装置的整体连接示意图。如图3所示,本实施例中,控制器11可以通过can通信模块和/或lin通信模块与外界实现数据通信。对于can通信模块,其通过can发送管脚和can接收管脚与控制器11连接。can接收管脚用于
将从can总线上接收到的can报文,即第一数据,发送给控制器11,以使得控制器11可以对该can报文进行解析,从而根据解析到的报文数据进行相应的调整操作。例如,can接收管脚用于接收外部ecu的数据,然后向控制器11发送第一数据。can发送管脚用于接收控制器11发送的运行状态和响应结果的can报文,即第二数据,以方便can总线上的其他网络节点对控制器11的实时监控。例如,can发送管脚接收控制器11发送的第二数据,并将该数据发送给外部ecu。
29.对于lin通信模块,其通过lin发送管脚和lin接收管脚与控制器11连接。lin接收管脚用于将从lin总线上接收到的lin帧,即第三数据,发送给控制器11,以使得控制器11对lin帧进行解析,从而根据解析到的帧数据进行相应的调整操作。例如,lin接收管脚用于接收外部ecu的数据,然后向控制器11发送第一数据。lin发送管脚用于接收控制器11发送的运行状态和响应结果的lin帧,即第四数据,以方便lin总线上的其他网络节点对控制器11的实时监控。例如,lin发送管脚接收控制器11发送的第二数据,并将该数据发送给外部ecu。本技术方案这样设计,可以使得控制器11兼容不同的通信方式,从而适用多种不同的应用场景。
30.在本实施例中,可选地,所述装置还包括sbc模块;sbc模块与控制器11、can通信模块和lin通信模块连接,用于给控制器11、can通信模块和lin通信模块供电;sbc模块,还用于监控控制器11的工作状态。
31.sbc(system basis chip,系统基础芯片)可以生成电源总线,并通过电源总线连接控制器11、can通信模块和lin通信模块,以给控制器11、can通信模块和lin通信模块供电。本实施例中,sbc还通过spi总线与控制器连接,以通过spi总线监控控制器11的工作状态。若控制器11在一定时间不对sbc看门狗进行喂狗,就会对控制器11产生复位指令。具体地,sbc生成的电源总线的输入端与外部电源连接,电源总线的输出端和控制器11、can通信模块和lin通信模块连接,以向控制器11、can通信模块和lin通信模块供电。本实施例中的sbc可以实现电源监控、硬件监控和软件监控。电源监控:硬件设计上,sbc有独立的电源监控电路,分为主状态机和功能安全状态机。主状态机和功能安全状态机之间相互独立,保证电源监控的独立性。同时,sbc上电时能进行电源状态检测。硬件监控:对控制器11故障失效的硬件监控。sbc有一对io2/io3可配置为fccu模式给到控制器11,以监控控制器11的硬件状态。软件监控:主要是sbc内部有看门狗,控制器11需要定期给其喂狗,保证控制器11对多电机进行协同管理。
32.看门狗可以让控制器11在意外状况下,如软件陷入死循环,重新恢复到系统上电状态,以保证系统出问题的时候重启一次。通俗地说,就跟我们现在用电脑一样,死机了就按一下reset键重启一次电脑。而看门狗就是负责操作重启的任务。也就是说,看门狗就是一个计数器,由于位数有限,计数器能够装的数值是有限的,比如8位的最多装256个数、16位的最多装65536个数。看门狗启动时,就开始不停的数机器周期,数一个机器周期,计数器就加1,加到计数器溢出就产生一个复位信号,重启系统。一般情况下,先根据看门狗的位数和系统的时钟周期算一下计满数需要的时间。在这个时间内看门狗是不会装满的,而在这个时间内告诉看门狗要重新开始计数,就是把计数器清零,这个过程叫喂狗。这样隔一段时间喂一次狗,只要程序正常运行看门狗就永远计不满,一旦出现死循环之类的故障,没有及时来清零计数器,就会导致计数器溢出,则看门狗就重启系统。不同控制器11的看门狗实现
方法不尽相同,但是原理都一样。而且看门狗都是在被启动了之后就不能被关闭,只能系统复位,即重新断电在上电才能关闭。设置看门狗的步骤如下:
33.1.设置看门狗的相关寄存器,启动看门狗;
34.2.隔一段时间清零一次,即喂狗;
35.3.如果程序正常,一直运行;如果程序出错,没有按时喂狗,看门狗就在溢出的时候复位系统。
36.如图3所示,实际应用场景中,sbc的rst引脚、fccu1引脚、fccu2引脚、fs0b引脚和fs1b引脚分别与控制器11的pta5、ptf17、ptf18、ptf0和ptf8连接。当控制器11没有及时对sbc进行喂狗操作时,sbc将rst引脚拉低,控制器11和sbc都会进行复位。当sbc内部出现故障时,会将内部状态通过fs0b/fs1b反馈给控制器11;当控制器11出现故障时,可以通过fccu1/fccu2通知sbc。本技术方案这样设计,可以对控制器11进行实时监控,从而确保电机控制装置处于安全有序的运行状态。
37.在本实施例中,可选地,控制器11还包括adc单元;adc单元与无刷电机驱动模块12连接,用于采集无刷电机的运行数据。
38.如图2所示,本实施例中的控制器11可以包括多个adc单元。adc(analog-to-digital converter,模数转换器)用于将设备产生的温度、压力、声音、指纹或者图像等模拟信号转换成更容易处理的数字信号。本实施例中的adc单元与无刷电机驱动模块12连接,用于采集无刷电机驱动模块12中的电压、电流和温度等信号,并将采集到的电压、电流和温度信号反馈给控制器11。当无刷电机出现故障的时候,无刷电机驱动模块12会反馈fault信号给控制器11,以通知控制器11进行关断。具体地,控制器11可以根据无刷电机驱动模块12的数量设置相应数量的adc单元。本技术方案这样设计,可以实现监控无刷电机的状态,避免因无刷电机故障导致的安全事故和不必要的能源损耗。
39.在本实施例中,可选地,无刷电机驱动模块12用于根据三相互补pwm确定三路svpwm,并将三路svpwm分别输入无刷电机,以驱动无刷电机。
40.本实施例中的无刷电机驱动模块12在接收到控制器11输出的第一控制指令,根据第一控制指令中的三相互补pwm确定三路svpwm,并将三路svpwm分别输入无刷电机,以驱动无刷电机。具体地,一个无刷电机驱动模块12控制一个无刷电机。每个无刷电机驱动模块12需要将三路svpwm输入无刷电机,以对无刷电机进行驱动,通过调节三路svpwm变频速度控制无刷电机转速。此外,控制器11还可以通过adc单元采集每个无刷电机三相的电流、电压与温度信号。svpwm,是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成pwm波,以所形成的实际磁链矢量来追踪其准确磁链圆。
41.如图3所示,假设本实施例中有3个无刷电机驱动模块,3个无刷电机驱动模块控制3个无刷电机。实际应用场景中,对于第1个无刷电机驱动模块,控制器11的ptd26、ptd27、ptd28、ptd29、ptd21和ptd22分别连接第1个无刷电机驱动模块的uh、ul、vh、vl、wh和wl,通过定时器111和逻辑单元112输出3对三相互补pwm。3对三相互补pwm分别作用于第1个无刷电机驱动模块的uh和ul、vh和vl、wh和wl,从而使第1个无刷电机驱动模块向无刷电机输出u、v和w三路svpwm。控制器11的adc0通道0,adc1通道0和adc2通道0分别采集第1个无刷电机驱动模块三相的电压。adc0通道1,adc1通道1和adc2通道1分别采集第1个无刷电机驱动模
块三相的电流。adc1通道7采集第1个无刷电机驱动模块的温度。
42.对于无刷电机驱动模块2,控制器11的ptd30、ptd31、ptd23、ptd24、ptc23和ptc14分别连接第2个无刷电机驱动模块的uh、ul、vh、vl、wh和wl,通过定时器111和逻辑单元112输出3对三相互补pwm。3对三相互补pwm分别作用于第2个无刷电机驱动模块的uh和ul、vh和vl、wh和wl,从而使第2个无刷电机驱动模块向无刷电机输出u、v和w三路svpwm。控制器11的adc0通道2,adc1通道2和adc2通道2分别采集第2个无刷电机驱动模块三相的电压。adc0通道3,adc1通道3和adc2通道3分别采集第2个无刷电机驱动模块三相的电流。adc1通道19采集第2个无刷电机驱动模块的温度。
43.对于第3个无刷电机驱动模块,控制器11的ptc21、ptc20、ptc19、ptc18、ptc28和ptc26分别连接第3个无刷电机驱动模块的uh、ul、vh、vl、wh和wl,通过定时器111和逻辑单元112输出3对三相互补pwm。3对三相互补pwm分别作用于第3个无刷电机驱动模块的uh和ul、vh和vl、wh和wl,从而使第3个无刷电机驱动模块向无刷电机输出u、v和w三路svpwm。控制器11的adc0通道4,adc1通道4和adc2通道4分别采集第3个无刷电机驱动模块三相的电压。adc0通道5,adc1通道5和adc2通道5分别采集第3个无刷电机驱动模块三相的电流。adc1通道8采集第3个无刷电机驱动模块的温度。
44.本技术方案这样设计,可以实现对无刷电机的控制和监控,以确保多个无刷电机能够协同运作,避免出现安全事故和不必要的能源损耗。
45.在本实施例中,可选地,三相互补pwm为带死区插入的三相互补pwm。
46.控制器11根据foc算法,通过定时器111和逻辑单元112可以输出带死区插入的三相互补pwm。具体地,逻辑单元112中的lc可以在pwm加入死区,使得从定时器111输出的三相pwm转换为带死区插入的三相互补pwm。本技术方案这样设计,可以避免无刷电机驱动模块12中的上下mos管同时导通,防止出现短路,导致出现烧坏器件的情况。
47.在本实施例中,可选地,有刷电机驱动模块13用于接收控制器11输出的第二控制指令,并根据第二控制指令输出第一相线路信号和第二相线路信号,当第一相线路信号为高电平,第二相线路信号为低电平时,控制有刷电机正转,当第一相线路信号为低电平,第二相线路信号为高电平时,控制有刷电机反转;当第一相线路信号和第二相线路信号均为高电平或低电平时,控制有刷电机停止转动;控制器11,还用于通过定时器111输出pwm,以控制有刷电机的转速。
48.具体地,有刷电机驱动模块13用于接收到控制器11输出的第二控制指令,即控制器11通过spi总线在有刷电机驱动模块13的内部寄存器配置二相线路信号。二相线路信号包括第一相线路信号和第二相线路信号。在本实施例中,第一相线路信号为a相信号,第二相线路信号为b相信号。当第二控制指令为使a相信号为高电平,b相信号为低电平时,有刷电机驱动模块13则输出a相高电平,b相低电平,控制有刷电机正转。当第二控制指令为使a相信号为低电平,b相信号为高电平时,有刷电机驱动模块13则输出a相低电平,b相高电平,控制有刷电机反转。当第二控制指令为使a相信号和b相信号同时为高电平或者低电平时,有刷电机驱动模块13则输出a相高电平和b相高电平,或者a相低电平和b相低电平。控制有刷电机停止转动。此外,控制器11可以通过ptg1引脚与有刷电机驱动模块13的en信号引脚连接,控制有刷电机驱动模块13的使能,即控制有刷电机的停止转动或启动。控制器11通过ptg21引脚和有刷电机驱动模块13的ftm引脚连接,向有刷电机驱动模块13输出pwm,以控制
有刷电机的转速。pwm频率越大,有刷电机的转速越大,反之则越小。本设计方案这样设计,可以增加控制器11对有刷电机的控制方式,以加大控制器11在不同控制场景下的实用性。
49.在本实施例中,可选地,步进电机驱动模块14用于接收控制器11输出的第三控制指令,并根据第三控制指令输出第一低边驱动信号、第二低边驱动信号、第三低边驱动信号和第四低边驱动信号,当信号输出顺序为第一低边驱动信号、第二低边驱动信号、第三低边驱动信号和第四低边驱动信号时,控制步进电机正转,当信号输出顺序为第四低边驱动信号、第三低边驱动信号、第二低边驱动信号和第一低边驱动信号时,控制步进电机反转。
50.可以理解的是,第三控制指令为控制器11通过spi总线在步进电机驱动模块14的内部寄存器配置的使能信号。一般情况下,1个步进电机驱动模块14可以控制3个步进电机转动。控制器11可以通过ptg2引脚与步进电机驱动模块14的en信号引脚连接,控制步进电机驱动模块14的使能,即控制步进电机的停止转动或启动。
51.假设1个步进电机驱动模块14控制3个步进电机。具体地,步进电机驱动模块14通过out0-out3引脚连接第1个步进电机、out4-out7引脚连接第2个步进电机、out8-out11引脚连接第3个步进电机。
52.在本实施例中,当out0-out 3引脚的信号输出顺序分别为第一低边驱动信号、第二低边驱动信号、第三低边驱动信号和第四低边驱动信号时,控制步进电机正转。当out0-out 3引脚的信号输出顺序分别为第四低边驱动信号、第三低边驱动信号、第二低边驱动信号和第一低边驱动信号时,控制步进电机反转。当out0-out 3引脚均没有输出驱动信号时,控制步进电机停止转动。当out4-out 7引脚的信号输出顺序分别为第一低边驱动信号、第二低边驱动信号、第三低边驱动信号和第四低边驱动信号时,控制步进电机正转。当out4-out 7引脚的信号输出顺序分别为第四低边驱动信号、第三低边驱动信号、第二低边驱动信号和第一低边驱动信号时,控制步进电机反转。当out4-out 7引脚均没有输出驱动信号时,控制步进电机停止转动。当out8-out 11引脚的信号输出顺序分别为第一低边驱动信号、第二低边驱动信号、第三低边驱动信号和第四低边驱动信号时,控制步进电机正转。当out8-out 11引脚的信号输出顺序分别为第四低边驱动信号、第三低边驱动信号、第二低边驱动信号和第一低边驱动信号时,控制步进电机反转。当out8-out 11引脚均没有输出驱动信号时,控制步进电机停止转动。
53.可以理解的是,步进电机的转速和out引脚的输出驱动信号的速度有关。若控制器11通过spi总线配置out引脚的输出驱动信号的速度越快,则步进电机转速越大,反之则越小。本设计方案这样设计,可以增加控制器11对步进电机的控制方式,以加大控制器11在不同控制场景下的实用性。
54.图4为本实施新型实施例提供的车辆中控设备的示意图。如图4所示,本实施例中,车辆中控设备包括电机控制装置,所述电机控制装置连接至少一个无刷电机、至少一个有刷电机和至少一个步进电机。此外,电机控制装置还可以连接can总线和lin总线,以通过上述实施例所述的can通信模块或lin通信模块,实现与外部设备的数据通信。电机控制装置可以针对无刷电机、有刷电机和步进电机输出相应的管理机制,实现了对不同类型的电机进行协同管理的效果。
55.本实施新型实施例提供了一种车辆中控设备,包括上述实施例的电机控制装置,因此也具有与上述实施例所提供的电机控制装置相同的有益效果。此处不再赘述。
56.本实施新型实施例提供了一种车辆,包括上述各实施例的电机控制装置,因此也具有与上述实施例所提供的电机控制装置相同的有益效果。此处不再赘述。
57.以上所述的具体实施例,对本实施新型的目的、技术方案和有益效果进行了进一步的详细说明,应当理解,以上所述仅为本实施新型的具体实施例而已,并不用于限定本实施新型的保护范围。特别指出,对于本领域技术人员来说,凡在本实施新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实施新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。