1.本发明属于手术机器人技术领域,具体涉及一种可旋转的机器人末端工具和可旋转的医用摆锯。
背景技术:
2.在手术机器人领域,尤其骨科手术,临床普遍使用的是基于固定摆锯,若有些手术姿态想要摆锯旋转则无法通过末端工具来实现,需要用机械臂的旋转来解决,而通过机械臂的旋转也有精度缺陷。现发明一款可旋转机械人末端工具,当手术姿态需要旋转摆锯的时候,直接解锁末端工具,摆锯可直接旋转,达到想要的手术姿态。
技术实现要素:
3.本发明的目的在于克服现有技术的不足之处,提供了一种可旋转的机器人末端工具和可旋转的医用摆锯,解决了上述背景技术中的问题。
4.本发明解决其技术问题所采用的技术方案之一是:提供了一种可旋转的机器人末端工具,包括连杆、摆杆、操作杆和夹具圆盘;所述连杆装设于机械臂的末端,所述连杆上开设弧形槽;所述摆杆的一端与连杆枢接,另一端装设有操作杆;所述操作杆的一端伸入弧形槽内且设有锁止装置和复位装置;所述夹具圆盘通过连接轴与摆杆连接并与摆杆同步转动。
5.在本发明一较佳实施例中,所述锁止装置包括螺纹槽,所述螺纹槽设置于弧形槽的底部,所述操作杆的外壁设有螺纹。
6.在本发明一较佳实施例中,所述复位装置包括弹簧座和弹簧,所述弹簧座由摆杆延伸至弧形槽的底部,所述弹簧设置于弹簧座内且套设于所述操作杆的外周。
7.在本发明一较佳实施例中,所述操作杆上设有限位凸缘,所述限位凸缘在弹簧座内运动,所述弹簧设置于弹簧座和限位凸缘之间,所述弹簧座上方对应位置的摆杆上设有防脱平台。
8.在本发明一较佳实施例中,所述连杆的端部设有贯穿孔,所述连接轴通过轴承装设于所述贯穿孔内。
9.在本发明一较佳实施例中,所述连接轴的底部通过偏心连接件固定有所述夹具圆盘,所述偏心连接件位于连接轴的非中轴线位置上。
10.在本发明一较佳实施例中,所述连杆通过连接法兰与机械臂连接。
11.在本发明一较佳实施例中,所述操作杆的顶部设有操作手柄。
12.在本发明一较佳实施例中,所述弧形槽为圆心角120
°
的圆弧。
13.本发明解决其技术问题所采用的技术方案之二是:提供了一种可旋转的医用摆锯,采用上述的可旋转的机器人末端工具,且所述夹具圆盘上装设有摆锯。
14.本技术方案与背景技术相比,它具有如下优点:
15.1、本发明的可旋转末端工具,一端可直接固定摆锯,一端固定在机械臂末端,中间
有锁止和复位装置,旋开锁止装置摆锯就可旋转,旋转角度
±
60
°
,旋紧锁止装置摆锯就直接固定在末端工具上面不可移动。
16.2、还内置一个弹簧复位装置,当解锁时可自动复位到最佳状态。
17.3、摆杆、连杆、夹具圆盘的立体错层设置,防止旋转时碰撞。
18.4、夹具圆盘与摆杆间通过带有轴承的连接轴连接,且设置偏心连接件,使夹具圆盘能够与摆杆同步运动,防止滑脱,最大程度避免精度缺陷。
19.5、本发明的夹具圆盘连接固定摆锯,解决用末端工具仅用于固定摆锯无法旋转的作用,解决手术姿态的需求,手术精度高,手术操作简单,时间短。
附图说明
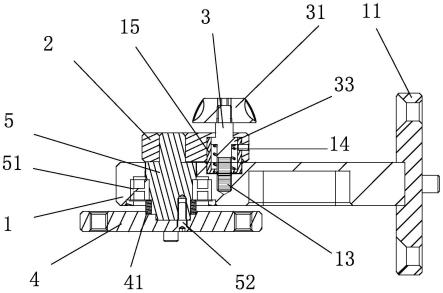
20.图1为实施例1的整体结构剖视图;
21.图2为实施例1的平面结构图;
22.图3为实施例1锁止状态图;
23.图4为实施例1解锁状态图。
24.其中,1-连杆,11-连接法兰,12-弧形槽,13-螺纹槽,14-弹簧,15-弹簧座,16-防脱平台,2-摆杆,3-操作杆,31-圆手柄,32-螺纹,33-限位凸缘,4-夹具圆盘,41-固定块,5-连接轴,51-轴承,52-偏心连接件
具体实施方式
25.需要说明的是,术语“上”、“下”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
26.实施例1
27.本实施例一种可旋转的机器人末端工具,包括连杆1、摆杆2、操作杆2和夹具圆盘4。
28.所述连杆1的一端通过连接法兰11装设于机械臂的末端,另一端设有由上至下的贯穿孔。所述连杆1上开设弧形槽12,所述弧形槽12的底部设置螺纹槽13,所述螺纹槽13设有内螺纹。
29.所述摆杆2设置于连杆1上方,摆杆2的一端与连杆1枢接,另一端装设有操作杆2。所述操作杆2的顶端设有圆手柄31,底端伸入弧形槽12内且设有锁止装置和复位装置。
30.本实施例中,所述锁止装置包括螺纹槽13和操作杆2的外壁设置的螺纹32。解锁状态下,操作杆2可沿弧形槽12轨迹运动,带动摆杆2摆动;当操作杆2旋入螺纹槽13,则为锁止状态,操作杆2无法移动,相应的摆杆2无法摆动。
31.本实施例中,所述复位装置包括弹簧座15和弹簧14,所述弹簧座15由摆杆2延伸至弧形槽12的底部,所述弹簧14设置于弹簧座15内且套设于所述操作杆2的外周。所述操作杆2上设有限位凸缘33,所述限位凸缘33在弹簧座15内运动,所述弹簧14设置于弹簧座15和限位凸缘33之间,所述弹簧座15上方对应位置的摆杆2上设有防脱平台16。当操作杆2旋出螺纹槽13后,在弹簧14的作用向,限位凸缘33上移使操作杆2复位。
32.所述夹具圆盘4通过连接轴5与摆杆2连接并与摆杆2同步转动。所述连接轴5通过轴承51装设于所述贯穿孔内,连接轴5的上端与摆杆2固定连接,当摆杆2摆动时带动连接轴5转动,连接轴5的下端通过固定块41与夹具圆盘4固定连接,从而夹具圆盘4发生转动。
33.本实施例中,所述连接轴5的底部通过偏心连接件52固定有所述夹具圆盘4,所述偏心连接件52位于连接轴5的非中轴线位置上,所述偏心连接件52采用螺钉。
34.本实施例的弧形槽12为圆心角120
°
的圆弧,对称设置于连杆1轴线的两侧,可以实现旋转角度
±
60
°
,满足医用手术机器人末端工具旋转要求。
35.实施例2
36.一种可旋转的医用摆锯,采用实施例1的可旋转的机器人末端工具,且所述夹具圆盘4上装设有摆锯。
37.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
技术特征:
1.一种可旋转的机器人末端工具,其特征在于:包括连杆、摆杆、操作杆和夹具圆盘;所述连杆装设于机械臂的末端,所述连杆上开设弧形槽;所述摆杆的一端与连杆枢接,另一端装设有操作杆;所述操作杆的一端伸入弧形槽内且设有锁止装置和复位装置;所述夹具圆盘通过连接轴与摆杆连接并与摆杆同步转动。2.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述锁止装置包括螺纹槽,所述螺纹槽设置于弧形槽的底部,所述操作杆的外壁设有螺纹。3.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述复位装置包括弹簧座和弹簧,所述弹簧座由摆杆延伸至弧形槽的底部,所述弹簧设置于弹簧座内且套设于所述操作杆的外周。4.根据权利要求3所述的一种可旋转的机器人末端工具,其特征在于:所述操作杆上设有限位凸缘,所述限位凸缘在弹簧座内运动,所述弹簧设置于弹簧座和限位凸缘之间,所述弹簧座上方对应位置的摆杆上设有防脱平台。5.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述连杆的端部设有贯穿孔,所述连接轴通过轴承装设于所述贯穿孔内。6.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述连接轴的底部通过偏心连接件固定有所述夹具圆盘,所述偏心连接件位于连接轴的非中轴线位置上。7.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述连杆通过连接法兰与机械臂连接。8.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述操作杆的顶部设有操作手柄。9.根据权利要求1所述的一种可旋转的机器人末端工具,其特征在于:所述弧形槽为圆心角120
°
的圆弧。10.一种可旋转的医用摆锯,其特征在于:采用权利要求1~9任一项所述的可旋转的机器人末端工具,且所述夹具圆盘上装设有摆锯。
技术总结
本发明公开了一种可旋转的机器人末端工具和可旋转的医用摆锯。该末端工具包括连杆、摆杆、操作杆和夹具圆盘;所述连杆装设于机械臂的末端,所述连杆上开设弧形槽;所述摆杆的一端与连杆枢接,另一端装设有操作杆;所述操作杆的一端伸入弧形槽内且设有锁止装置和复位装置;所述夹具圆盘通过连接轴与摆杆连接并与摆杆同步转动。在该末端工具的夹具圆盘上装设固定摆锯,即可作为可旋转的医用摆锯便于使用。用。用。
技术研发人员:郭少波 曾达 林韵 冯庆山 张晓锋
受保护的技术使用者:厦门博创中源医疗科技有限公司
技术研发日:2022.07.14
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
