技术特征:
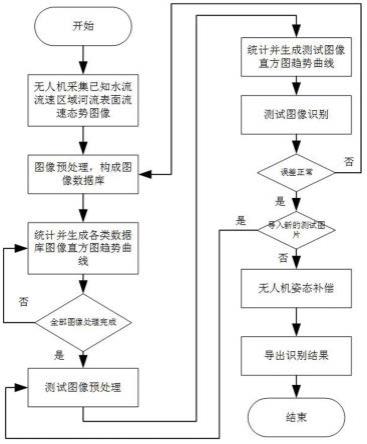
1.一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于,包括如下步骤:步骤1,使用无人机拍摄已知流速的监测区域河流表面流速态势图像,提取监测区域图像帧序列中的水流部分,并对进行图像预处理;步骤2,提取预处理后图像的灰度值,计算出每个像素点所对应的方向及梯度大小;步骤3,根据像素点的方向将其放入不同方向区块,统计所有图像像素点对应的方向区块信息,生成统计直方图,并根据直方图生成趋势曲线;步骤4,根据直方图趋势曲线的比对确定待测水流区域的水流流速。2.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:在步骤1中,所述监测区域为[1—101]处水流流速在0-10m/s范围内均匀分布的河段,流速间隔为0.1m/s,监测帧序列通过无人机拍摄的水流监测区域视频帧序列及照片生成。3.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:在步骤1中,所述图像预处理为对图像进行尺度变换、伽马变换及灰度化。4.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:所述灰度值提取方法为伽马校正法。5.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:在步骤3中,所述计算像素点所对应方向为调用核函数处理目标像素上下左右像素,通过模值与反三角函数计算得出。6.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:在步骤3中,将像素点放入不同区域,其像素方向划分范围为1-360度,等分为36个区域;其中像素方向处于区域交界处不足1度的四舍五入成整数,同时目标像素点所对应的梯度累加。7.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:统计所有图像方向信息存于数据库中即对所有图像进行批处理,训练得到各类图像的方向信息;然后再对各类图像分别进行归一化,即得到各类图像各个方向所占的比例;最后通过统计保存各类图像各个方向直方图趋势曲线将拍摄的二维图片降维为一维。8.根据权利要求1所述的一种基于ai无人机视觉技术的河流表面流速检测方法,其特征在于:通过比对确定待测水流监测区域的水流流速即对已保存的图像直方图趋势曲线数据库进行测试,通过比较各类图像直方图趋势曲线与测试图像直方图趋势曲线,选取相同测试点,计算所对应的方差,取最小值对应的标签即为识别的流速分类。9.一种基于ai无人机视觉技术的河流表面流速检测装置,包括安装在无人机上的主控制模块和电源模块,其特征在于:所述主控制模块包括单片机u1,单片机u1分别与4g通讯模块g1和图像采集模块p1相连;单片机u1的pc14和pc15串口与低速时钟模块相连,该低速时钟模块内的晶振x3并联着串联在一起的电容c18和电容c19;单片机u1的vdd和vss接口分别与vcc2和接地线相连;单片机u1通过vbat接口为其供电,该接口分别连接二极管d7、二极管d8和电容c23;电池b2的两端接在电容c23与二极管d8之间;单片机u1通过reset接口与置位模块相连,所述置位模块包括电阻r7、开关k2和电容c20,其中开关k2和电容c20并联,电阻r7的两端分别连接vcc2和电容c20;单片机u1的vref-、osc-in和osc-out接口与外部高速时钟模块相连;所述高速时钟模块采用8mhz晶振x4,晶振x4与电阻r9并联,电阻r9的两端分别
连接电容c25和电容c24;单片机u1的vref 、vdda和vssa接口与模拟量电压模块相连,vref 和vdda均与vssa接口之间连接并联的电容c21和电容c22,电阻r8的两端分别连接vcc2和vref 、vdda接口;所述电源模块包括四个并联的二极管d1、d2、d3和d4,从二极管d1、d3和二极管d2、d4之间引出两根导线,其中一根导线分别连接电容c1、电阻r1和三极管q1、q2的基极,另一根导线分别连接电容c1的另一端、电容c2、稳压二极管灯led1、电阻r5、电容c3、滑动变阻器rp1和vcc2的负极;两根导线之间通过电容c1相连,同时并联一个由电阻r1和电容c2组成的串联电路;在电阻r1与电容c2的连接处,引出一根导线连接至三极管q1的基极,三极管q1的集电极与电阻r1和三极管q2集电极相连,三极管q1的发射极与三极管q2的基极相连,三极管q2的发射极连接电阻r2;在电阻r2的另一端,分别与电阻r3、稳压二极管灯led2、电阻r4、电容c3和滑动变阻器rp1相连;电阻r3的另一端分别与稳压二极管灯led1和三极管q3的发射极相连;三极管q3的集电极分别与电阻r1、三极管q1的基极、电容c2和稳压二极管灯led2相连,三极管q3的基极分别与电阻r4和电阻r5相连。
技术总结
本发明公开了一种基于AI无人机视觉技术的河流表面流速检测方法及装置,使用无人机拍摄已知流速的监测区域河流表面流速态势图像,提取监测区域图像帧序列中的水流部分,并对进行图像预处理;提取预处理后图像的灰度值,计算出每个像素点所对应的方向及梯度大小;根据像素点的方向将其放入不同方向区块,统计所有图像像素点对应的方向区块信息,生成统计直方图,并根据直方图生成趋势曲线;根据直方图趋势曲线的比对确定待测水流区域的水流流速。本发明使用非接触式的测量方式取代传统接触式仪器河流测速,能够大幅度的减少测量成本投入。入。入。
技术研发人员:刘英杰 秦鸿飞 王海峰 薛海 陈友军 赵瑞霞 吴思琪 侯朝渝 刘雪梅 刘明堂
受保护的技术使用者:华北水利水电大学
技术研发日:2022.01.28
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。