1.本实用新型属于读码设备技术领域,具体涉及一种读码机。
背景技术:
2.读码机也即溯源读码机,是用在复合线路板等生产产线上的一种读码设备,复合线路板也即多层线路板集成在一起的线路板,在生产过程中,为便于后续的生产及检修等步骤,现有的复合线路板的内层会刻有追溯码,这些追溯码可以为二维码等,在加工过程中需要借助溯源读码设备进行读码,以便于后续的生产检修等,读码机进行读码时主要是依靠x光成像在成像平板上以进行读码,但是一般采用两套模组分别控制x光的发出机构及成像平板分别移动且使x光的发出机构及成像平板对应并同步移动,或者如专利申请号202123275799.x的一种pcb板检测用x-ray检测装置,采用的技术方案是设置x光发射机构、影像接收机构及载物机构等结构,在使用时将pcb放置在载物机构上进行读码使用,但是pcb板未进行定位。因此,结合现有的采用两套模组分别控制x光的发出机构及成像平板的读码设备以及专利申请号202123275799.x的一种pcb板检测用x-ray检测装置,不难得出现有技术中的读码设备仍存在定位不精准,有误差,控制不同步的问题。
技术实现要素:
3.本实用新型为了解决现有技术中的不足之处,提供一种控制同步,定位精准的读码机。
4.为解决上述技术问题,本实用新型采用如下技术方案:
5.读码机,包括:
6.机架,所述机架的前后两侧壁上分别设有上料口和下料口;
7.移载拍板定位机构,所述移载拍板定位机构安装在所述机架内,所述移载拍板定位机构用于移载线路板进行拍板及定位;
8.读码机构,所述读码机构安装在所述机架内且用于对移载拍板定位机构移载拍板定位后的线路板进行读码;以及
9.输送机构,所述输送机构设置在机架内,所述移载拍板定位机构安装在所述输送机构上,所述读码机构位于所述输送机构的右侧,所述输送机构用于将线路板输送至移载拍板定位机进行移载拍板及定位,所述输送机构还用于将读码机构读码后的线路板输送至下料口。
10.优选的,所述输送机构包括第一安装板、第二安装板、入料口封闭组件、出料口封闭组件、第一驱动组件以及多个第一辊轴,所述第一安装板和第二安装板左右间隔对称齐平等高设置在所述机架内,所述多个第一辊轴转动设置于所述第一安装板和第二安装板之间,相邻两个所述第一辊轴之间形成第一间隙,所述第一驱动组件设置于所述第一安装板上并用于驱动各所述第一辊轴转动;
11.所述入料口封闭组件包括入料闸口升降气缸和第一阻挡杆,所述入料闸口升降气
缸安装在所述机架内前部,所述第一阻挡杆与所述入料闸口升降气缸的输出轴相连,所述入料闸口升降气缸的输出端朝上设置且入料闸口升降气缸位于多个第一辊轴中最前侧的第一辊轴的前侧中部,所述第一阻挡杆位于上料口的正后方;
12.所述出料口封闭组件包括出料闸口升降气缸和第二阻挡杆,所述出料闸口升降气缸安装在所述机架内后部,所述第二阻挡杆与所述出料闸口升降气缸的输出轴相连,所述出料闸口升降气缸的输出端朝上设置且出料闸口升降气缸位于多个第一辊轴中最后侧的第一辊轴的后侧中部,所述第二阻挡杆位于下料口的正前方。
13.优选的,所述移载拍板定位机构包括第三安装板、第四安装板、第五安装板、拍板驱动组件、拍板杆、阻挡板、顶升组件、定位组件和限位组件,所述第三安装板和第四安装板左右间隔对称齐平等高设置在机架内所述第一安装板和第二安装板之间,所述拍板驱动组件的右端部安装在第四安装板上,所述拍板驱动组件的左端部安装在第五安装板上,所述拍板驱动组件的左端安装在第三安装板上,所述第五安装板沿前后方向安装在机架内第三安装板的右侧且与第三安装板间隔设置,所述顶升组件安装在所述第三安装板与第四安装板之间且顶升组件的上部向上穿过第一间隙伸至第一间隙的上方,所述拍板杆沿前后方向设置且位于所述顶升组件的上侧左部,所述拍板杆与拍板驱动组件相连,所述阻挡板沿前后方向设置且阻挡板位于所述顶升组件的右侧,所述阻挡板安装在所述第四安装板上右侧,所述定位组件安装在所述第五安装板上且定位组件的上部向上穿过第一间隙伸至第一间隙的上方,所述拍板杆的右侧前部、右侧中部和右侧后部分别设有第一缺口、第二缺口和第三缺口,所述第一缺口、第二缺口和第三缺口分别与所述定位组件的前部、中部及后部上下对应设置,所述限位组件安装在第一安装板和第二安装板之间且限位组件位于顶升组件的后侧,所述限位组件与顶升组件相邻设置,所述限位组件的上部向上穿过第一间隙伸至第一间隙的上方。
14.优选的,所述第三安装板包括第一立板和第一横板,所述第四安装板包括第二立板和第二横板,所述第一立板和第二立板均沿前后方向设置在所述第一安装板和第二安装板之间,第一立板和第二立板左右间隔对称齐平等高设置,所述第一横板沿水平方向固定在所述第一立板的右侧底部,所述第二横板沿水平方向固定在所述第二立板的左侧底部,所述第一横板和第二横板左右对称齐平等高设置,所述第二横板下侧右中部设有第一气缸,所述第一气缸的输出端向上穿过第二横板与阻挡板底面中部相连,所述第二横板顶面右侧前部和后部分别设有第一伸缩轴和第二伸缩轴,所述第一伸缩轴的上端与阻挡板的底面前部相连,所述第二伸缩轴的上端与阻挡板的底面后部相连;
15.所述第五安装板沿前后水平方向设置在所述第一横板的右侧,所述定位组件包括定位板,所述定位板沿前后方向设置且位于第五安装板的正上方,所述第五安装板底侧中部安装有第二气缸,所述第二气缸的输出端向上穿过第五安装板与定位板的底面中部相连,所述第五安装板的顶面前部和顶面后部分别设有第三伸缩轴和第四伸缩轴,所述第三伸缩轴的上部与定位板的底面前侧相连,所述第三伸缩轴的上部与定位板的底面后侧相连,所述定位板的顶面前部、顶面中部和顶面后部分别竖直向上设有第三气缸、第四气缸和第五气缸,所述第三气缸的输出端、第四气缸的输出端以及第五气缸的输出端分别设有第一定位压块、第二定位压块和第三定位压块,所述第一缺口与第一定位压块上下对应设置,第二缺口与第二定位压块上下对应设置,第三缺口与第三定位压块上下对应设置,第一定
位压块、第二定位压块和第三定位压块均向上穿过第一间隙伸至第一间隙的上方。
16.优选的,所述拍板驱动组件包括驱动电机、第一导杆、第二导杆和拍板驱动板,所述驱动电机安装在第二横板底侧且驱动电机的输出轴朝上设置,所述驱动电机的输出轴上安装有主动轮,所述第一横板底侧设有辅助安装板所述辅助安装板上转动安装有从动轮,所述主动轮和从动轮位于同一条直线上且主动轮和从动轮上套设有传动带,所述第一导杆和第二导杆沿左右水平方向前后间隔设置,第一导杆位于第二导杆的前侧,所述拍板驱动板沿前后方向安装在第五安装板顶面右部且拍板驱动板位于定位板的右侧,所述拍板驱动板的上部与拍板杆相连,所述第一导杆的左端和第二导杆的左端均固定在第一立板上,所述第一导杆的右端和第二导杆的右端均固定在第二立板上,所述拍板驱动板的下部与传动带相连,所述拍板驱动板套设在第一导杆和第二导杆的左端部上且拍板驱动板沿第一导杆和第二导杆左右滑动;
17.所述顶升组件包括顶升架、第六气缸和第七气缸,所述顶升架左侧底部前后间隔设有第五伸缩轴和第六伸缩轴,所述顶升架右侧底部前后间隔设有第七伸缩轴和第八伸缩轴,所述顶升架通过第五伸缩轴和第六伸缩轴与第一横板的顶面相连,所述顶升架通过第七伸缩轴和第八伸缩轴与第二横板的顶面相连,所述第六气缸安装在第一横板底部且第六气缸的输出轴向上穿过第一横板与顶升架固定,所述第七气缸安装在第二横板底部且第七气缸的输出轴向上穿过第二横板与顶升架固定,所述顶升架的顶部向上穿过第一间隙伸至第一间隙的上方且顶升架的顶部沿左右方向转动安装有若干个顶轮,所述阻挡板位于顶升架的右侧。
18.优选的,所述限位组件包括限位安装板和限位挡板,所述限位安装板沿左右水平方向安装在第一安装板和第二安装板之间且限位安装板位于第一辊轴的下方,所述限位挡板沿左右竖直方向安装在限位安装板的顶面上方,所述限位挡板位于顶升架的后侧且限位挡板的上部向上穿过第一间隙伸至第一间隙的上方,所述限位安装板底面中部设有第八气缸,所述第八气缸的输出轴朝上设置且第八气缸的输出轴朝上穿过限位安装板与限位挡板的顶面中部相连,所述限位安装板左部和右部分别设有第一导孔和第二导孔,所述第一导孔和第二导孔均沿上下方向贯穿限位安装板,所述限位挡板的面左部和右部分别设有第三导杆和第四导杆,所述第三导杆插设在第一导孔内,所述第四导杆插设在第二导孔内。
19.优选的,所述读码机构包括y轴模组,所述y轴模组沿前后方向设置在所述机架内第二安装板的右侧,所述y轴模组左侧滑动安装有滑动板,所述滑动板的左侧上部安装有x-ray光管,所述滑动板的左侧下部安装有成像平板,所述x-ray光管与成像平板上下对应设置,所述x-ray光管的底部位于第一辊轴的顶部上方,所述成像平板的顶部低于第一辊轴的顶部。
20.采用上述技术方案,本实用新型具有以下有益效果:
21.(1)本实用新型设有读码机构,读码机构包括y轴模组,y轴模组左侧滑动安装有滑动板,滑动板的左侧上部安装有x-ray光管,滑动板的左侧下部安装有成像平板,x-ray光管与成像平板上下对应设置,本实用新型的负责发出x光的x-ray光管及负责成像的成像平板均位于同一个y轴模组上,在使用时x-ray光管与成像平板可以同步移动,控制同步,具体使用将需要溯源读码的线路板送入x-ray光管与成像平板之间即可完成读码,与现有技术中采用两套模组分别控制x光的发出机构及成像平板分别移动相比,本实用新型的读码机构
控制同步,成像更精准;
22.(2)本实用新型设有移载拍板定位机构,具体包括拍板驱动组件、拍板杆、阻挡板、顶升组件和定位组件等零部件,本实用新型的定位组件及阻挡板等零部件可以对线路板进行精准控制定位,以便于拍板驱动组件驱动拍板杆移动后进行拍板定位,定位精准;
23.综上所述,本实用新型具有控制同步,定位精准等优点。
附图说明
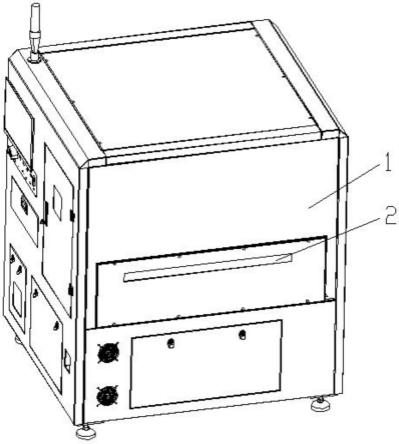
24.图1是本实用新型的结构示意图;
25.图2是图1中去掉机架时的结构示意图;
26.图3是图2另一个方向上的结构示意图;
27.图4是本实用新型移载拍板定位机构的结构示意图;
28.图5是图4另一个方向上的结构示意图;
29.图6是图4又一个方向上的结构示意图。
具体实施方式
30.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
31.通常在此处附图中描述和显示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。
32.基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
35.本实用新型适用于溯源码也即溯源二维码在多层线路板55的边缘时进行使用溯源。
36.如图1-6所示,在本实用新型的一个实施例中,本实用新型的读码机,包括机架1、移载拍板定位机构、读码机构以及输送机构,所述机架1的前后两侧壁上分别设有上料口2和下料口(现有成熟技术,被遮挡,图未示出),所述移载拍板定位机构安装在所述机架1内,所述移载拍板定位机构用于移载线路板55进行拍板及定位,所述读码机构安装在所述机架1内且用于对移载拍板定位机构移载拍板定位后的线路板55进行读码,所述输送机构设置
在机架1内,所述移载拍板定位机构安装在所述输送机构上,所述读码机构位于所述输送机构的右侧,具体应用时,并非限定读码机构只能设置在输送机构的右侧,可以根据应用场景的不同或具体现场板料内码的位置的不同,从而将读码机构设置在输送机构的左侧,相应的本技术的其它机构也可以根据需求调整方位以便于实现读码,所述输送机构用于将线路板55输送至移载拍板定位机进行移载拍板及定位,所述输送机构还用于将读码机构读码后的线路板55输送至下料口,具体的上料口2用于上料,下料口用于下料,上料口2和下料口可以与输送机构位于同一平面内,不仅便于输送机构将线路板55从上料口2接入输送也便于将线路板55输送至下料口。
37.具体的,所述输送机构包括第一安装板3、第二安装板4、入料口封闭组件、出料口封闭组件、第一驱动组件5以及多个第一辊轴6,所述第一安装板3和第二安装板4左右间隔对称齐平等高设置在所述机架1内,所述多个第一辊轴6转动设置于所述第一安装板3和第二安装板4之间,相邻两个所述第一辊轴6之间形成第一间隙7,所述第一驱动组件5设置于所述第一安装板3上并用于驱动各所述第一辊轴6转动,具体的第一驱动组件5可以为电机,电机的输出轴及多个第一辊轴6的左端上套设有转动带,电机可以通过转动带驱动多个第一辊轴6转动;
38.具体的,所述入料口封闭组件包括入料闸口升降气缸8和第一阻挡杆9,所述入料闸口升降气缸8安装在所述机架1内前部,所述第一阻挡杆9与所述入料闸口升降气缸8的输出轴相连,所述入料闸口升降气缸8的输出端朝上设置且入料闸口升降气缸8位于多个第一辊轴6中最前侧的第一辊轴6的前侧中部,所述第一阻挡杆9位于上料口2的正后方,第一阻挡杆9上可以安装用于闭合上料口2的第一闭合板,在使用时入料闸口升降气缸8可以带动第一阻挡杆9上下移动从而使得第一闭合板闭合或打开上料口2,上料口2闭合后可以防止本技术的读码机构的x-ray光管发出的x射线通过上料口2外泄至本技术的外侧,避免出现人身安全事故;
39.具体的,所述出料口封闭组件包括出料闸口升降气缸10和第二阻挡杆11,所述出料闸口升降气缸10安装在所述机架1内后部,所述第二阻挡杆11与所述出料闸口升降气缸10的输出轴相连,所述出料闸口升降气缸10的输出端朝上设置且出料闸口升降气缸10位于多个第一辊轴6中最后侧的第一辊轴6的后侧中部,所述第二阻挡杆11位于下料口的正前方,同理第二阻挡杆11上可以安装用于闭合下料口的第二闭合板,在使用时出料闸口升降气缸10可以带动第二阻挡杆11上下移动从而使得第一闭合板闭合或打开下料口,下料口闭合后可以防止本技术的读码机构的x-ray光管发出的x射线通过下料口外泄至本技术的外侧,避免出现人身安全事故。
40.具体的,所述移载拍板定位机构包括第三安装板、第四安装板、第五安装板12、拍板驱动组件、拍板杆13、阻挡板14、顶升组件、定位组件和限位组件,所述第三安装板和第四安装板左右间隔对称齐平等高设置在机架1内所述第一安装板3和第二安装板4之间,所述拍板驱动组件的右端部安装在第四安装板上,所述拍板驱动组件的左端部安装在第五安装板12上,所述拍板驱动组件的左端安装在第三安装板上,所述第五安装板12沿前后方向安装在机架1内第三安装板的右侧且与第三安装板间隔设置(所述第五安装板12位于第四安装板的左侧),所述顶升组件安装在所述第三安装板与第四安装板之间且顶升组件的上部向上穿过第一间隙7伸至第一间隙7的上方,所述拍板杆13沿前后方向设置且位于所述顶升
组件的上侧左部,所述拍板杆13与拍板驱动组件相连,所述阻挡板14沿前后方向设置且阻挡板14位于所述顶升组件的右侧,所述阻挡板14安装在所述第四安装板上右侧,所述定位组件安装在所述第五安装板12上且定位组件的上部向上穿过第一间隙7伸至第一间隙7的上方,所述拍板杆13的右侧前部、右侧中部和右侧后部分别设有第一缺口15、第二缺口16和第三缺口17,所述第一缺口15、第二缺口16和第三缺口17分别与所述定位组件的前部、中部及后部上下对应设置,所述限位组件安装在第一安装板和第二安装板之间且限位组件位于顶升组件的后侧,所述限位组件与顶升组件相邻设置,所述限位组件的上部向上穿过第一间隙伸至第一间隙的上方。
41.具体的,所述第三安装板包括第一立板18和第一横板19,所述第四安装板包括第二立板20和第二横板21,所述第一立板18和第二立板20均沿前后方向设置在所述第一安装板3和第二安装板4之间,第一立板18和第二立板20左右间隔对称齐平等高设置,所述第一横板19沿水平方向固定在所述第一立板18的右侧底部,所述第二横板21沿水平方向固定在所述第二立板20的左侧底部,所述第一横板19和第二横板21左右对称齐平等高设置,所述第二横板21下侧右中部设有第一气缸22,所述第一气缸22的输出端向上穿过第二横板21与阻挡板14底面中部相连,所述第二横板21顶面右侧前部和后部分别设有第一伸缩轴23和第二伸缩轴24,所述第一伸缩轴23的上端与阻挡板14的底面前部相连,所述第二伸缩轴24的上端与阻挡板14的底面后部相连;
42.具体的,所述第五安装板12沿前后水平方向设置在所述第一横板19的右侧,所述定位组件包括定位板25,所述定位板25沿前后方向设置且位于第五安装板12的正上方,(所述定位板25位于拍板驱动板的左侧)所述第五安装板12底侧中部安装有第二气缸26,所述第二气缸26的输出端向上穿过第五安装板12与定位板25的底面中部相连,所述第五安装板12的顶面前部和顶面后部分别设有第三伸缩轴27和第四伸缩轴28,所述第三伸缩轴27的上部与定位板25的底面前侧相连,所述第三伸缩轴27的上部与定位板25的底面后侧相连,所述定位板25的顶面前部、顶面中部和顶面后部分别竖直向上设有第三气缸29、第四气缸30和第五气缸31,(第三气缸29、第四气缸30和第五气缸31的输出端均朝上设置)所述第三气缸29的输出端、第四气缸30的输出端以及第五气缸31的输出端分别设有第一定位压块32、第二定位压块33和第三定位压块34,所述第一缺口15与第一定位压块32上下对应设置,第二缺口16与第二定位压块33上下对应设置,第三缺口17与第三定位压块34上下对应设置,第一定位压块32、第二定位压块33和第三定位压块34均向上穿过第一间隙7伸至第一间隙7的上方。
43.具体的,所述拍板驱动组件包括驱动电机35、第一导杆36、第二导杆37和拍板驱动板38,所述驱动电机35安装在第二横板21底侧且驱动电机35的输出轴朝上设置,所述驱动电机35的输出轴上安装有主动轮56,所述第一横板19底侧设有辅助安装板39所述辅助安装板39上转动安装有从动轮40,所述主动轮56和从动轮40位于同一条直线上且主动轮56和从动轮40上套设有传动带,所述第一导杆36和第二导杆37沿左右水平方向前后间隔设置,第一导杆36位于第二导杆37的前侧,所述拍板驱动板38沿前后方向安装在第五安装板12顶面右部且拍板驱动板38位于定位板25的右侧,所述拍板驱动板38的上部与拍板杆13相连,所述第一导杆36的左端和第二导杆37的左端均固定在第一立板18上,所述第一导杆36的右端和第二导杆37的右端均固定在第二立板20上,所述拍板驱动板38的下部与传动带相连,所
述拍板驱动板38套设在第一导杆36和第二导杆37的左端部上且拍板驱动板38沿第一导杆36和第二导杆37左右滑动(所述拍板驱动板38与传动带的前半幅或后半幅的其中之一相固定,驱动电机35通过主动轮56带动传动带转动,传动带带动拍板驱动板38沿第一导杆36和第二导杆37左右滑动,所述第一导杆36及第二导杆37均位于第一伸缩轴23与第二伸缩轴24之间,所述第一导杆36及第二导杆37均位于第三伸缩轴27与第四伸缩轴28之间),具体的上料口2处的机架1上可以设有第一传感器,第一传感器的检测方向朝向上料口2处设置,当第一传感器检测到上料口2处有线路板55进入,可以发出信号从而第一驱动组件5可以启动,具体的,第一辊轴6的前部左右两侧可以分别设有第二传感器和第三传感器,第二传感器和第三传感器可以相对设置,第二传感器和第三传感器可以用于检测线路板55在第一辊轴6上移动一定位置且快要进入拍板位置也即拍板杆13与阻挡板14之间时,第二传感器和第三传感器可以发出信号,第一驱动组件5可以进行控制减速,第一辊轴6转动速度变慢,拍板杆13和阻挡板14之间的第一辊轴6之间设有第四传感器和第五传感器,第四传感器和第五传感器主要用于检测线路板55进入拍板定位位置也即拍板杆13与阻挡板14的正中位置时,第四传感器和第五传感器可以发出信号通知第一驱动组件5停止工作,第一辊轴6停止转动,更具体的,拍板杆13的初始安装位置也即拍板杆13位于第一立板18和第二立板20之间左部时,第一立板18和第二立板20之间前侧设有一加强杆,加强杆左部和右中部分别设有第六传感器和第七传感器,第六传感器对应控制拍板杆13处于初始位置也即零点位置,第七传感器可以用于对应控制拍板杆13的拍板完成位置,具体的各个传感器均为现有成熟技术,本实用新型在具体应用时可以根据需求安装各个传感器;
44.具体的,所述顶升组件包括顶升架41、第六气缸42和第七气缸43,所述顶升架41左侧底部前后间隔设有第五伸缩轴44和第六伸缩轴45,所述顶升架41右侧底部前后间隔设有第七伸缩轴46和第八伸缩轴47,所述顶升架41通过第五伸缩轴44和第六伸缩轴45与第一横板19的顶面相连,所述顶升架41通过第七伸缩轴46和第八伸缩轴47与第二横板21的顶面相连,所述第六气缸42安装在第一横板19底部且第六气缸42的输出轴向上穿过第一横板19与顶升架41固定,所述第七气缸43安装在第二横板21底部且第七气缸43的输出轴向上穿过第二横板21与顶升架41固定,所述顶升架41的顶部向上穿过第一间隙7伸至第一间隙7的上方且顶升架41的顶部沿左右方向转动安装有若干个顶轮48,所述阻挡板14位于顶升架41的右侧(第一导杆36和第二导杆37均位于第五伸缩轴44和第六伸缩轴45之间,第一导杆36和第二导杆37均位于第七伸缩轴46和第八伸缩轴47之间,顶升架41包括前后方向的左连接杆、右连接杆以及若干个横向连接杆,若干个横向连接杆沿左右方向前后间隔设置在左连接杆与右连接杆之间,若干个顶轮48安装在横向连接杆上,若干个顶轮48之间相互间隔设置形成第二间隙,左连接杆的底面前部、中部和后部分别与第五伸缩轴44、第六气缸42和第六伸缩轴45相连,右连接杆的底面前部、中部和后部分别与第七伸缩轴46、第七气缸43和第八伸缩轴47相连,左连接杆、右连接杆及横向连接杆均位于第一辊轴6下方,若干个顶轮48伸入第一间隙7之间,顶升架41在第六气缸42和第七气缸43作用下顶升时,左连接杆、右连接杆及横向连接杆仍位于第一辊轴6下方,若干个顶轮48穿过第一间隙7伸至第一间隙7及第一辊轴6上方,顶升架41整体位于定位板25的上方)。
45.具体的,所述限位组件包括限位安装板60和限位挡板61,所述限位安装板60沿左右水平方向安装在第一安装板和第二安装板之间且限位安装板60位于第一辊轴的下方,所
述限位挡板61沿左右竖直方向安装在限位安装板60的顶面上方,所述限位挡板61位于顶升架的后侧且限位挡板61的上部向上穿过第一间隙伸至第一间隙的上方(所述限位挡板61位于顶升架后侧的多个第一间隙中最前侧的第一间隙内),所述限位安装板60底面中部设有第八气缸62,所述第八气缸62的输出轴朝上设置且第八气缸62的输出轴朝上穿过限位安装板60与限位挡板61的顶面中部相连,所述限位安装板60左部和右部分别设有第一导孔和第二导孔,所述第一导孔和第二导孔均沿上下方向贯穿限位安装板60,所述限位挡板61的面左部和右部分别设有第三导杆63和第四导杆64,所述第三导杆63插设在第一导孔内,所述第四导杆64插设在第二导孔内,具体的限位组件可以对进入拍板杆13和阻挡板14之间的线路板进行限位,防止线路板继续在第一辊轴上向后移动,限位安装板60顶面后侧或前侧可以安装限位传感器,该限位传感器可以用于检测线路板的后端移动至该限位挡板61此刻处于的第一间隙时,第八气缸62启动上升顶动限位挡板61上升,限位挡板61通过第三导杆63、第四导杆64及第八气缸62的输出轴上升至第一间隙的上方完成限位。
46.具体的,所述读码机构包括y轴模组49,所述y轴模组49沿前后方向设置在所述机架1内第二安装板4的右侧,所述y轴模组49左侧滑动安装有滑动板50,所述滑动板50的左侧上部安装有x-ray光管51,所述滑动板50的左侧下部安装有成像平板52,所述x-ray光管51与成像平板52上下对应设置,所述x-ray光管51的底部位于第一辊轴6的顶部上方,所述成像平板52的顶部低于第一辊轴6的顶部(x-ray光管51及成像平板52紧邻阻挡板14设置,阻挡板14落下时,移载拍板定位机构可以将线路板55向右移动直至送入x-ray光管51及成像平板52之间进行读码后再向左移动),具体的机架1内还设有用于控制本实用新型的读码机构、输送机构、移载拍板定位机构等工作的控制器等零部件,机架1外侧还设有键盘、急停按钮、控制屏等配套设备以用于本实用新型的控制。
47.本实用新型的具体使用过程如下:
48.本实用新型在使用时,本实用新型与其它设备等配合使用,位于本实用新型上游生产程序的设备将线路板55生产完毕后将线路板55送至上料口2,入料闸口升降气缸8启动,入料闸口升降气缸8的输出端收缩将第一阻挡杆9下拉,上料口2被打开,线路板55经上料口2送入本实用新型的机架1内,此时第一传感器检测到上料口2进料,第一传感器将信号反馈给本实用新型的控制器,本实用新型的控制器控制输送机构启动,第一驱动组件5启动带动多个第一辊轴6转动,线路板55沿第一辊轴6向后移动;
49.当第二传感器和第三传感器检测到第一辊轴6上的线路板55时,第二传感器和第三传感器将信号反馈给本实用新型的控制器,控制器控制第一驱动组件5减速,第一辊轴6转动速度减慢,与此同时第一气缸22启动,第一气缸22的输出端向上伸出,第一气缸22驱动阻挡板14上升,阻挡板14在第一气缸22、第一伸缩轴23及第二伸缩轴24作用下上升,第三气缸29、第四气缸30和第五气缸31均启动,第三气缸29、第四气缸30和第五气缸31分别驱动第一定位压块32、第二定位压块33和第三定位压块34上升,第一定位压块32、第二定位压块33和第三定位压块34分别与拍板杆13的第一缺口15、第二缺口16及第三缺口17是对应的,此时第一定位压块32、第二定位压块33和第三定位压块34均位于线路板55上方且与拍板杆13的下方;
50.当线路板55运动至拍板杆13及阻挡板14的正中位置,也即第四传感器和第五传感器检测到线路板55移动至指定位置时,限位传感器检测到线路板的后端移动至限位挡板61
此刻处于的第一间隙时,第八气缸62启动,第八气缸62的输出轴向上顶动限位挡板61,限位挡板61通过第三导杆63、第四导杆64及第八气缸62的输出轴上升至第一间隙的上方完成限位,防止线路板在惯性等作用下继续沿第一辊轴继续向后移动,第四传感器和第五传感器向本实用新型的控制发出信号,控制器控制第一驱动组件5暂停工作,第一辊轴6停止转动,线路板55此时停止移动,第六气缸42和第七气缸43启动,第六气缸42和第七气缸43驱动顶升架41上升,顶升架41的上部的若干个顶轮48穿过第一间隙7伸至第一间隙7的上方且若干个顶轮48将线路板55顶起,此时,入料闸口升降气缸8启动,入料闸口升降气缸8的输出端伸出将第一阻挡杆9顶起,上料口2被关闭,具体应用时,限位挡板61是顶在上方的也即限位挡板61上升至第一间隙的上方进行限位,线路板被读码完成需要经过限位挡板61进行下料时,限位挡板61会下移便于线路板通过,线路板完成下料后,限位挡板61再次复位上移;
51.驱动电机35启动,驱动电机35通过主动轮56及从动轮40带动传动带转动,传动带带动拍板驱动板38向右移动,拍板驱动板38带动拍板杆13、第五安装板12及第五安装板12上的定位板25、第三气缸29、第四气缸30和第五气缸31等向右移动,拍板杆13向右移动过程中带动线路板55沿顶轮48向右移动直至线路板55右侧与阻挡板14的左侧面接触,具体的阻挡板14和拍板杆13之间中部可以设有减速信号传感器,阻挡板14上可以设有停止信号传感器,减速信号传感器检测到线路板55时向控制器发出信号,控制器控制驱动电机35减速,当停止信号传感器检测到线路板55时,停止信号传感器向控制器发出信号,控制器控制驱动电机35停止转动,此时线路板55位于拍板杆13和阻挡板14之间且线路板55分别与拍板杆13和阻挡板14接触,拍板完成,也即线路板55被整理整齐,此处的线路板55可以为一个或多个;
52.第三气缸29、第四气缸30和第五气缸31启动收缩,第一定位压块32、第二定位压块33和第三定位压块34下移将线路板55的左端压紧,然后第一气缸22启动,第一气缸22的输出端向下收缩,第一气缸22驱动阻挡板14下移,阻挡板14在第一气缸22、第一伸缩轴23及第二伸缩轴24作用下下移,此时线路板55位于阻挡板14的上方,阻挡板14此时对线路板55没有阻挡作用;
53.本技术在使用前,本实用新型的使用人员根据线路板的工单信息得到线路板内部码的位置坐标在然后将本实用新型调配好,本技术的控制器可以控制驱动y轴模组将x-ray光管移动至特定的读码位置进行等待,然后驱动电机35再次启动,拍板驱动板38带动拍板杆13继续向右移动,拍板杆13带动线路板55继续向右移动到设定位置,使得线路板55的右侧刚好进入x-ray光管51与成像平板52之间且线路板55内的二维码刚好位于x-ray光管51与成像平板52之间,接着第六气缸42和第七气缸43启动收缩并带动顶升架41下移,定位板25也在第二气缸26作用下下移;
54.然后x-ray光管51发出x光,x光穿过线路板55成像在成像平板52上并将成像信息反馈给本实用新型控制器等最终显示在本实用新型的控制屏上;
55.读码完成后,第六气缸42和第七气缸43启动向上伸出,顶升架41再次上移将线路板55顶起,定位板25也在第二气缸26作用下上升,最终将线路板55顶起卡紧,然后驱动电机35启动并通过拍板驱动板38将线路板55向左拉动,拉动至设定位置时,第三气缸29、第四气缸30和第五气缸31启动伸出,第一定位压块32、第二定位压块33和第三定位压块34松开线路板55,驱动电机35继续工作带动拍板杆13持续向左移动直至拍板杆13移动至第六传感器
的零点位置时,驱动电机35停止工作,第六气缸42和第七气缸43收缩,顶升架41下落,线路板55落在第一辊轴6上,然后第一驱动组件5启动带动第一辊轴6转动,第一辊轴6将线路板55输送至下料口;
56.出料闸口升降气缸10启动将第二阻挡杆11向下拉动,下料口打开,线路板55从下料口流出,然后出料闸口升降气缸10上升,第二阻挡板14上升,下料口关闭,本实用新型完成了一次线路板55的溯源读码。
57.本实施例并非对本实用新型的形状、材料、结构等作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。