1.本发明涉及一种液位传感系统,特别是有关一种利用光学技术正确且快速检测目标容器的液位传感系统。
背景技术:
2.传统饮水机不能侦测容器内水面高度与侦测容器内的杯体特性。使用者需目视观察容器,并且手动控制饮水机的出水按钮以避免液体溢出容器。传统咖啡机利用近接传感器或超声波传感器侦测容器是否放在靠近出水口的正确位置;然而,近接传感器与超声波传感器无法侦测容器的杯体特性、剩余容量和容器内的液面信息。因此,如何设计一种能利用光学检测技术侦测容器的剩余容量和杯体特性以及容器内的液面信息以提高饮水机或咖啡机附加功能的液体检测装置,便为相关光学检测产业的发展目标之一。
技术实现要素:
3.本发明涉及一种利用光学技术正确且快速检测目标容器的液位传感系统。
4.本发明进一步公开一种液位传感系统,用来检测目标容器。该液位传感系统包括系统主体,光学传感器,风扇单元以及运算处理器。该系统主体具有乘载平台,用来放置该目标容器。该光学传感器设置在该乘载平台的上方,用来产生涵盖该目标容器的侦测图像。该风扇单元设置在该系统主体,并且朝向该乘载平台。该运算处理器电连接该光学传感器。该运算处理器分析在该风扇单元运转时产生的该侦测图像,从而在该侦测图像中取得该目标容器的有效特征点。
5.本发明还公开该液位传感系统进一步包括照明光源,设置在该系统主体,向该乘载平台输出照明光。
6.本发明还公开该照明光投放到该目标容器的侧面,该运算处理器分析该照明光在该侦测图像中内的照明特征,以判断该目标容器为透明容器或非透明容器。
7.本发明还公开该液位传感系统进一步包括流体输出器,用来将流体注入该目标容器,该光学传感器与该流体输出器相邻设置在该系统主体。
8.本发明还公开该风扇单元制造吸力或吹力以排出该乘载平台上方的气体。
9.本发明还公开该运算处理器进一步电连接该风扇单元,并根据该侦测图像的图像品质启动或关闭该风扇单元。
10.本发明还公开该运算处理器还会根据该侦测图像的该图像品质调整该风扇单元的风力。
11.本发明还公开该液位传感系统进一步包括加热单元,设置在该系统主体,用来提高该乘载平台上方的环境温度。
12.本发明还公开该加热单元为红外线加热器,该红外线加热器输出的加热光信号的波长介于2000纳米与4000纳米。
13.本发明还公开该液位传感系统进一步包括保护罩,覆盖在该光学传感器,该保护
罩的外表面具有除雾涂层。
14.本发明还公开一种液位传感系统,用来检测目标容器。该液位传感系统包括系统主体,支撑板,光学传感器以及运算处理器。该系统主体具有乘载平台。该支撑板设置在该乘载平台。该支撑板由低反射率材质制作,用来放置该目标容器。该光学传感器设置在该乘载平台的上方,用来产生涵盖该目标容器与该支撑板的侦测图像。该运算处理器电连接该光学传感器。该运算处理器分析该侦测图像,以在该侦测图像取得能区别该目标容器与该支撑板的有效特征点。
15.本发明还公开该液位传感系统进一步包括照明光源,设置在该系统主体,向该乘载平台输出照明光。
16.本发明还公开该照明光投放到该目标容器的侧面,该运算处理器分析该照明光在该侦测图像中内的照明特征,以判断该目标容器为透明容器或非透明容器。
17.本发明还公开该光学传感器以不同曝光参数分别产生多张侦测图像。
18.本发明还公开该运算处理器将该侦测图像的图像特征相比于特征门槛范围,并在该图像特征超出该特征门槛范围时缩短该光学传感器的曝光参数,另外在该图像特征等于或低于该特征门槛范围时延长该曝光参数。
19.本发明还公开该光学传感器以第一曝光参数与第二曝光参数交替产生第一侦测图像及第二侦测图像,并且该第一侦测图像的该第一曝光参数大于该第二侦测图像的该第二曝光参数。
20.本发明还公开该运算处理器分析该第一侦测图像以找出该目标容器的杯缘,还会分析该第二侦测图像以确认该目标容器内的液面高度。
21.本发明还公开该运算处理器将该液面高度相比于预设高度条件,并根据比较结果调整该第一侦测图像与该第二侦测图像在单位时间内的数量比例。
22.本发明还公开该运算处理器判断该液面高度符合该预设高度条件时,提高该第二侦测图像在该单位时间内的数量。
23.本发明还公开该运算处理器判断该液面高度符合该预设高度条件时,只利用该第二曝光参数产生该第二侦测图像。
24.本发明的液位传感系统可利用风扇单元与加热单元的其中一种或两种排除目标容器上方的蒸气,确保光学传感器取得的侦测图像不会受干扰而影响其图像品质。液位传感系统还可在光学传感器选择性设置具有除雾涂层的保护罩,以能进一步避免侦测图像受到蒸汽干扰。液位传感系统可优选地在乘载平台设置低反射率材质制作的支撑板,并且可利用照明光源以侧向投射方式将照明光投放在目标容器的侧面,再搭配光学传感器的长短曝光交错机制,首先识别目标容器属于透明容器或非透明容器,从而根据目标容器的杯体特性选择相应曝光演算法,始能精确侦测到目标容器的杯缘和液面高度的相关信息。
附图说明
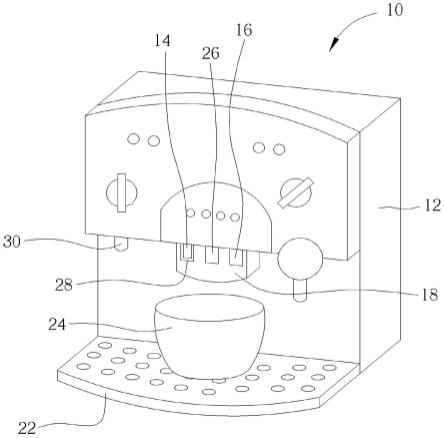
25.图1为本发明第一实施例的液位传感系统的外观示意图。
26.图2为本发明第一实施例的液位传感系统的功能方块图。
27.图3与图4为本发明第一实施例的液位传感系统在不同情境所取得侦测图像的示意图。
28.图5与图6为本发明第一实施例的液位传感系统在其它情境所取得侦测图像的示意图。
29.图7为本发明第二实施例的液位传感系统的外观示意图。
30.图8为本发明第二实施例的液位传感系统的功能方块图。
31.图9为本发明第二实施例的液位传感系统所取得侦测图像的示意图。
32.图10与图11为本发明第二实施例的液位传感系统在不同曝光参数所取得侦测图像的示意图。
33.其中,附图标记说明如下:
34.10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
液位传感系统
35.12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
系统主体
36.14
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学传感器
37.16
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
风扇单元
38.18
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
流体输出器
39.20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
运算处理器
40.22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
乘载平台
41.24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
目标容器
42.26
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
加热单元
43.28
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
保护罩
44.30
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
照明光源
45.50
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
液位传感系统
46.52
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
系统主体
47.54
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑板
48.56
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学传感器
49.58
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
运算处理器
50.60
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
乘载平台
51.62
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
目标容器
52.64
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
照明光源
53.i,i1,i2,i3,i4 侦测图像
54.il
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一侦测图像
55.is
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二侦测图像
具体实施方式
56.请参阅图1至图4,图1为本发明第一实施例的液位传感系统10的外观示意图,图2为本发明第一实施例的液位传感系统10的功能方块图,图3与图4为本发明第一实施例的液位传感系统10在不同情境所取得侦测图像的示意图。液位传感系统10可包括系统主体12、光学传感器14、风扇单元16、流体输出器18以及运算处理器20。系统主体12可具有乘载平台22,用来放置目标容器24。光学传感器14与流体输出器18可相邻设置在系统主体12,并且位于乘载平台22的上方。风扇单元16可设置在系统主体12,其可位于光学传感器14旁、或位于光学传感器14的下方;只要风扇单元16能朝向乘载平台22,即符合本发明之设计目的。
57.流体输出器18可用来将流体注入目标容器24。光学传感器14则会产生涵盖目标容器24的侦测图像i。运算处理器20可电连接光学传感器14、风扇单元16与流体输出器18。运算处理器20会分析侦测图像i以取得目标容器24的特征点,从而判断目标容器24的液位高度信息。然而,若流体为高温液体且风扇单元16没有启动时,光学传感器14会受到热蒸气的影响,致使其生成侦测图像i的特征点模糊难以辨识。因此,运算处理器20可启动风扇单元16,并分析光学传感器14在风扇单元16运转时产生的侦测图像i2,才能在侦测图像i2取得目标容器24的有效特征点,正确判断出目标容器24内的液位高度。
58.本发明中,风扇单元16可选择制造吸力或吹力去排出乘载平台22上方的气体,使光学传感器14能在不受热蒸汽干扰的环境下取得清晰侦测图像i;或者,风扇单元16还可能轮流制造吸力与吹力,只要能快速且确实排除乘载平台22上方气体的模式,皆属于本发明之设计目的。
59.光学传感器14生成侦测图像i时,运算处理器20可即时分析侦测图像i属于特征点模糊的侦测图像i1或特征点清晰的侦测图像i2。若属于图像品质不佳的侦测图像i1,运算处理器20可启动风扇单元16、或是在风扇单元16已启动的情况下进一步提高风扇单元16的风力;若属于图像品质优选的侦测图像i2,运算处理器20可关闭风扇单元16、或是在风扇单元16已启动的情况下降低风扇单元16的风力。
60.除此之外,液位传感系统10还可选择性在系统主体12设置温度传感器(没有绘制在附图中)。温度传感器可电连接运算处理器20,位于乘载平台22的上方,用来侦测目标容器24造成的环境温度变化。若温度传感器取得之环境温度高出预设温度值,表示目标容器24内的流体为高温液体,运算处理器20会启动风扇单元16、或是提高风扇单元16的风力;若温度传感器取得之环境温度等于或低于预设温度值,目标容器24内的流体不是高温液体,运算处理器20可关闭风扇单元16、或是降低风扇单元16的风力。
61.再者,液位传感系统10还可选择性在系统主体12设置加热单元26。加热单元26电连接运算处理器20,用来提高乘载平台22上方的环境温度。加热单元26优选地可为中波红外线加热器,输出波长介于2000纳米与4000纳米的加热光信号,目的在于加热蒸汽温度使其迅速蒸发散逸。运算处理器20可根据侦测图像i之图像品质与温度传感器之环境温度的其中一个或两个信息决定是否启动加热单元26、及决定加热单元26启动后的能量强度。特别一提的是,运算处理器20可以同时启动、或是交替启动风扇单元16和加热单元26来加速排除蒸气,其变化端视蒸汽弥漫幅度以及液位传感系统10的电源供应条件而定,故不再对其它变化态样详加说明。
62.一般来说,液位传感系统10优选地可利用保护罩28覆盖光学传感器14。保护罩28的外表面可具有除雾涂层,用以避免、或是减少蒸汽对于光学传感器14取得侦测图像i的图像品质干扰。除雾涂层可为具有高亲水性的聚碳酸酯或聚酯材质,在光学传感器14形成连续水膜来避免光线产生不规则散射,从而提高光学传感器14的清晰度。除雾涂层的材质不限于前揭实施态样,端视设计需求而定。
63.液位传感系统10还可进一步包括照明光源30,设置在系统主体12,并且电连接运算处理器20。照明光源30用来向乘载平台22输出照明光,据此提高侦测图像i的图像品质与清晰度。在其它的可能变化态样中,液位传感系统10会将照明光源30设置在系统主体12的侧边,照明光源30输出的照明光可投射到目标容器24的侧面。请参阅图5与图6,图5与图6为
本发明第一实施例的液位传感系统10在其它情境所取得侦测图像的示意图。如图5所示,若目标容器24为非透明容器,光学传感器14取得的侦测图像i3只会在目标容器24的小部分侧面出现照明光造成的照明特征;如图6所示,若目标容器24为透明容器,光学传感器14取得的侦测图像i4能在目标容器24的容器中间与大部分侧面出现照明特征。
64.换句话说,液位传感系统10可利用照明光源30对目标容器24进行侧向照明,再通过参考图像比较或深度学习等方式进行图像辨识,判断目标容器24属于透明容器或非透明容器,从而选择适合的演算法以从侦测图像i正确取得目标容器24的有效特征点。液位传感系统10可以在系统主体12设置单个照明光源30,兼具目标容器24的照明亮度提升与杯体分类侦测之目的;或者,液位传感系统10还可选择性设置两个照明光源30,分别用于目标容器24的照明亮度提升和杯体分类侦测。
65.因此,液位传感系统10取得侦测图像i时,首先可执行杯体分类侦测,将侦测图像i内因为侧向照明光产生的照明特征进行分类,判断目标容器24的杯体特性属于非透明容器或透明容器。若目标容器24为非透明容器,套用相应的曝光演算法去计算目标容器24的杯缘高度和液面高度,而能得到目标容器24的液位信息。此液位信息可为液面高度相对于杯缘高度的比例,然实际应用不限于此。若目标容器24为透明容器,优选地会先进行内容物材质辨识,例如辨识目标容器24内的流体是透明液体如水、或是非透明液体如咖啡,然后再依照流体材质选择相应的曝光演算法去计算目标容器24的杯缘高度和液面高度,以能得到目标容器24的液位信息。
66.请参阅图7至图11,图7为本发明第二实施例的液位传感系统50的外观示意图,图8为本发明第二实施例的液位传感系统50的功能方块图,图9为本发明第二实施例的液位传感系统50所取得侦测图像i的示意图,图10与图11为本发明第二实施例的液位传感系统50在不同曝光参数所取得侦测图像il及is的示意图。液位传感系统50可包括系统主体52、支撑板54、光学传感器56以及运算处理器58。系统主体52可具有乘载平台60。支撑板54可由低反射率材质制作,设置在乘载平台60上以承载目标容器62。光学传感器56可设置在乘载平台60的上方,用来产生涵盖目标容器62与支撑板54的侦测图像i。运算处理器58可电连接光学传感器56,用来分析侦测图像i,以在侦测图像i取得能区别目标容器62与支撑板54的有效特征点。
67.液位传感系统50主要用来侦测具有透明杯体的目标容器62的液位信息。乘载平台60通常由高反射率材质制作;若目标容器62直接放在乘载平台60,光学传感器56所取得侦测图像i会同时出现乘载平台60的反射特征和目标容器62的反射特征,运算处理器58难以清楚分辨两者差别,故无法取得目标容器62的正确液位信息。如图9所示,液位传感系统50将低反射率材质制作的支撑板54放在乘载平台60以承载目标容器62,侦测图像i内只会出现目标容器62和支撑板54,因此能有效消除乘载平台60的高反射量干扰,从而提高侦测图像i的图像辨识正确性。
68.另外,液位传感系统50还会利用长短曝光交错的机制去辨识目标容器62的杯缘和液面高度,以得到目标容器24的正确液位信息。光学传感器56会依据不同曝光参数分别产生多张侦测图像i,例如以较长的第一曝光参数生成第一侦测图像il、再以较短的第二曝光参数生成第二侦测图像is。在目标容器62的杯缘和液面高度尚为未知的情况下,光学传感器56会交替产生第一侦测图像il与第二侦测图像is;若取得初步液位信息、但不确定液位
信息是否仍会变化,则能视传感结果适应性地调整光学传感器56所取得第一侦测图像il和第二侦测图像is的生成比例,始能准确快速地得到目标容器24接续变化的液位信息。
69.举例来说,运算处理器58可将其取得液面高度相比于预设高度条件,再根据比较结果调整第一侦测图像il与第二侦测图像is在单位时间内的数量比例。如果液面高度不符或低于预设高度条件,表示目标容器62内只有少量或没有流体,此时光学传感器56优选地会以第一侦测图像il与第二侦测图像is交错产生的频率进行侦测。如液面高度符合或超出预设高度条件,表示目标容器62内的流体增加或填满,此时可提高第二侦测图像is在单位时间内的数量以去找出液位信息的持续变化;第一侦测图像il仍可用来侦测杯缘以判断目标容器62的位置是否改变。特别一提的是,若液面高度符合或超出预设高度条件,光学传感器56也可以只生成第二侦测图像is,去找出液位信息的后续变化。
70.由于目标容器62具有透明杯体,光学传感器56会提高侦测图像i的曝光参数,液位传感系统50需采用第一曝光参数生成的第一侦测图像il,才能清楚识别出目标容器62的杯缘,杯缘可参照如图10所示的虚线范围。但是长曝光参数生成的第一侦测图像il会因为目标容器62的容器内部反射而造成辨识率下降,故液位传感系统50会另行采用第二曝光参数生成的第二侦测图像is,才能清楚识别目标容器62内的液面高度。因此,液位传感系统50可利用侦测图像的长短曝光交错机制而能同时精确侦测到目标容器62的杯缘和液面高度的相关信息。
71.第一曝光参数与第二曝光参数的实际值可能会因为环境亮度、辅助照明、光学传感器56之侦测效能、以及运算处理器58之演算法而有所变化,故此不再详细说明。特别一提的是,液位传感系统50可以设定两组特征门槛范围,并将第一侦测图像il和第二侦测图像is的图像特征分别相比于不同的特征门槛范围。图像特征可能是侦测图像的亮度或其它参数。若其图像特征超出特征门槛范围,表示图像亮度过高,故可自动缩短光学传感器56的曝光参数以取得较佳品质的图像;若其图像特征等于或低于特征门槛范围,表示图像亮度偏低,而会自动延长光学传感器56的曝光参数,以利用适当的曝光参数生成第一侦测图像il与第二侦测图像is,用来取得有效特征点去识别目标容器62的杯缘和液面高度。
72.另外,液位传感系统50还能选择性设置照明光源64,设置在系统主体52,并且电连接运算处理器58。如第一实施例所述,照明光源64可向乘载平台60提供照明光;照明光源64除了能提升侦测图像i的照明亮度,还能用于杯体分类侦测。液位传感系统50利用照明光源64正确判断出目标容器62具有透明杯体之后,便可选择相应的曝光演算法,并且驱动光学传感器56以长短曝光交错机制生成相应的第一侦测图像il和第二侦测图像is,才能够正确辨识出目标容器62的杯缘和液面高度。
73.综上所述,本发明的液位传感系统可利用风扇单元与加热单元的其中一种或两种排除目标容器上方的蒸气,确保光学传感器取得的侦测图像不会受干扰而影响其图像品质。液位传感系统还可在光学传感器选择性设置具有除雾涂层的保护罩,以能进一步避免侦测图像受到蒸汽干扰。液位传感系统可优选地在乘载平台设置低反射率材质制作的支撑板,并且可利用照明光源以侧向投射方式将照明光投放在目标容器的侧面,再搭配光学传感器的长短曝光交错机制,首先识别目标容器属于透明容器或非透明容器,从而根据目标容器的杯体特性选择相应曝光演算法,始能精确侦测到目标容器的杯缘和液面高度的相关信息。
74.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。