1.本发明涉及专用车制造技术领域,具体涉及15~30米高空作业车车臂设计方法。
背景技术:
2.高空作业车是将人举升到一定高度进行空中作业的专用汽车,可以用于城市建设、公共设施维修、应急抢险、建筑工地及工业生产等多种场所。近些年随着城市化、工业化的不断发展,对可以进行特种作业的作业臂需求量很大,而作业高度在15-30m的中小型高空作业车可以满足大部分城市内的高空作业活动。所以对这类车臂进行合理的参数设计尤为重要。该类作业臂的选择一般存在以下问题:(1)作业臂截面尺寸的选择依靠经验及模仿国外同类型臂体,后续进行试验验证,设计周期长,研发成本高,未形成相应的选用方法;(2)作业臂材料选择较为不合理,一般都采用传统的q235钢材,厚度往往根据生产经验选择,导致不能充分发挥结构的力学性能。而现如今对节能减排的要求日益提高,专用车上蓝牌时对整车质量的要求也越来越严格,使用传统的q235材料和不科学的设计方法,常常会使整车超出4.5t的重量要求限制。
3.因此,开发出一种作业车车臂截面参数选用方法,提高设计开发效率,降低成本,提高材料利用率的作业车车臂截面参数选用方法具有重要意义。
技术实现要素:
4.本发明的目的是克服现有技术的缺陷和不足,提供一种能够缩短开发设计时间、提高材料利用率、降低设计成本的15~30米高空作业车车臂设计方法。
5.为实现以上目的,本发明的技术解决方案是:一种15~30米高空作业车车臂设计方法,包括以下步骤:s1、依据作业臂的刚度和强度限制条件选择合适的臂体材料种类,对于高空作业车车臂,其臂体的许用强度一般为:其中, 为材料屈服点, s 为安全系数,s=2.3;动载系数,;为应力集中系数,。
6.臂体的最大变形量要求为:其中,
푌퐶
为工作时的最大允许变形量;
퐿퐶
为工作长度;s2、依据工作高度和s1中选择的臂体材料选择合适的截面类型;
s3、在选择的材料和截面参数下,依据高空作业车的作业高度,以截面的高度h、宽度w、底边长度w1、斜角θ为设计参数,保证作业臂的截面周长不变,利用建模软件分析出作业臂在不同参数取值下的抗弯截面系数和抗屈曲能力,并根据作业臂所处的作业高度来对作业臂进行合理的选择;s4、根据s3所选择的作业臂参数关系,并利用有限元软件计算各节臂在不同截面高度h、截面厚度th时所受的应力变形情况,并通过响应面分析的方法,总结在保证作业臂质量最小的前提下,使作业臂质量最小的截面高度h、截面厚度th设计参数。
7.所述步骤s1中,当作业高度在15~20m时,此时作业臂全伸长度在11~17m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在800mpa~1000mpa;当作业高度在20~25m时,此时作业臂全伸长度在16~22m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在700mpa~800mpa;当作业高度在22-30m时,此时作业臂全伸长度在20-26m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在500mpa~700mpa。
8.所述步骤s2中,作业高度在15~20m时,作业臂截面选用五边形截面;作业高度在20~25m时,选用六边形截面;作业高度在25~30m时,选用六边形或八边形截面。
9.所述步骤s3中确定底边长度w1和斜角θ时,先根据设计经验确定宽度w和底边长度w1的比值w1/w的取值范围以及斜角θ的角度范围,再根据静力学分析和有限元分析的结果,得出在相同的质量下作业臂变形最小的w1/w和θ的取值范围。
10.所述步骤s3中对于四边形截面,当h/w的取值范围在1.35~1.45时,结构具有最大的抗屈曲能力;对于五边形截面当h/w的取值范围1.45~1.55时,结构具有最大的抗屈曲能力;对于六边形截面,当h/w的取值范围在1.65~1.75时,结构具有最大的抗屈曲能力。
11.与现有技术相比,本发明具有以下优势:1、本发明通过对各种可直接确定的作业臂设计参数进行综合分析,并在保证应力和变形的前提下进行多目标优化,设计周期短,得到的优化方法也具有普适性,不需要再因为一个参数的变化进行重复的设计。
12.2、本发明采用作业臂截面高度h、宽度w来确定不同截面下作业臂的最大抗屈曲能力,采用参数数量少、分析速度快、分析结果准确率高,可以大大降低作业臂的设计周期,同时该最大抗屈曲能力的选用方法也具有通用性。
附图说明
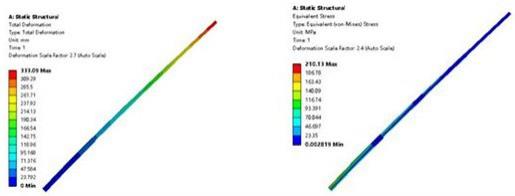
13.图1是本发明中作业臂应力应变云图。
14.图2是本发明中不同截面作业臂参数示意图。
15.图3是本发明中作业臂在不同截面底边长度下的变形值示意图。
16.图4是本发明中作业臂在不同截面斜角下的变形值示意图。
具体实施方式
17.以下结合附图说明和具体实施方式对本发明作进一步详细的说明:一种15~30米高空作业车车臂设计方法,包括以下步骤:s1、依据作业臂的刚度和强度限制条件选择合适的臂体材料种类,当臂体选用高强度的材料时,可以将在保证臂体强度的前提下,对臂体的厚度进行减薄。但减低臂体的厚
度,由于材料的弹性模量和泊松比基本不变,导致整个结构的挠度变大,从而使得臂体设计受限于刚度条件高空作业车作业高度越大,臂体全伸时的长度l越长,这种刚度制约就越明显,一般臂体全伸时的长度l是根据作业高度来确定的定值。
18.各节臂全伸之后总臂长为l,臂体的截面高为h,壁厚th。将作业臂最底部设为坐标原点,对于坐标位置处于0~0.3l之间的臂体,其设计截面高度h=0.018l~0.02l,截面厚度与当前位置截面高度成正比,其数值为th=0.012h~0.015h;处于0.2~0.5l之间的臂体,h应取0.013l~0.015l之间,th=0.01h~0.012h;处于0.4~0.8l之间的臂体,h应取0.01l~0.013l之间,th=0.009h~0.01h;处于0.7~1l之间的臂体,h应取40~45之间,th=0.008h~0.01h。
19.通过有限元软件模拟分析,为保证材料的刚度挠度均能满足要求,从而发挥充分降低生产的成本,当作业高度在15~20m时,此时作业臂全伸长度在11~17m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在800mpa~1000mpa;当作业高度在20~25m时,此时作业臂全伸长度在16~22m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在700mpa~800mpa;当作业高度在15~20m时,此时作业臂全伸长度在11~17m,此时为保证作业臂的刚度条件,选择的材料的屈服强度应该在500mpa~700mpa。
20.s2、依据臂体材料、工作高度、实际生产条件选择合适的截面类型。根据抗弯截面系数的计算公式,可以看出六边形截面的抗弯能力最强,而矩形截面的抗弯能力最差,但是考虑到加工成本的一系列问题,在满足使用性能的前提下尽可能的降低成本,所以:当作业高度在15~20m时,由于作业臂此时作业高度较小,整车的重量限制不大,可以在考虑经济成本的前提下选择四边形或五边形截面;而当作业高度在20m~30m时,此时作业车若想满足小于4.5t的要求,则必须尽可能降低车臂的重量,此时选用抗弯能力较强的六边形截面才可以满足要求。
21.s3、在选择的材料和截面参数下,依据高空作业车的作业高度,其具体的截面参数如附图2所示,本文以六边形截面为例,以截面的高度h、宽度w、底边长度w1、斜角θ为设计参数,保证作业臂的截面周长不变,利用建模软件分析出作业臂在不同参数取值下的抗弯截面系数和抗屈曲能力,并根据作业臂所处的作业高度来对作业臂进行合理的选择。
22.首先对w1和θ进行设计,首先对w1和θ进行设计,将w1的设计范围定位0.2w~0.5w, θ取值范围100
°
~170
°
,此时进行静力学分析,有限元分析结果如附图3和附图4所示。可以看出w1在0.3w时取最大值,θ在125
°
时取得最大值,通过分析得出当w1取值在0.25w~0.35w、θ取值在120
°
~130
°
时为最佳的设计参数,此时在相同的质量下作业臂的变形最小。
23.然后对h、w进行分析,对于六边形截面,当h/w=1.7时,结构具有最大的抗屈曲能力。本文以六边形截面为例,对于高空作业车前两节臂,由于所受的弯矩较大,所以要求更大的抗弯和抗屈曲能力,所以设计时应尽量截面具有较大的抗弯和抗屈曲能力,故此时臂体的h/w应在尽量大,保证在1.7左右;而对于前端的几节臂,所受的弯矩较小,可以考虑此时但是受到的风载和和其他附加载荷较大,所以h/w可以适当减小,取1.4~1.5之间。
24.s4、根据s3所选择的作业臂参数关系,并利用有限元软件计算各节臂在不同h、th时所受的应力变形情况,并通过响应面分析的方法,总结在保证作业臂质量最小的前提下,使作业臂质量最小的h、th设计参数。
25.对于某型号作业高度为23m高空作业车,作业臂全伸长度为18.8m,选用700mpa级
别的高强钢;第一节臂的截面高度选340mm,截面厚度为4.5mm。用这种规律的设计方法,可使车臂总重量由最初的553kg减轻至449kg,减重率达到18.8%。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。