1.本发明涉及制药设备技术领域,尤其涉及一种全自动瓶子取出装置。
背景技术:
2.在制药行业中,有一种多个瓶子被放置在蜂巢状容器中的包装形式,并且此蜂巢状容器被放置在方盒容器中。在制药生产的过程中,由于生产过程的要求,需要先把蜂巢状容器从方盒容器中取出,然后再把瓶子从蜂巢状容器中平稳、流畅、快速地取出,使瓶子呈零散的状态。瓶子被送入到下游设备。同时蜂巢状容器和方盒容器转运出设备。
技术实现要素:
3.本发明的目的在于提供一种全自动瓶子取出装置,把蜂巢状容器从方盒容器中取出来,再把瓶子从蜂巢状容器中取出并放置在平台上,然后送入下游设备。
4.实现上述目的的技术方案是:
5.一种全自动瓶子取出装置,包括机架,还包括:
6.装有瓶子的蜂巢状容器;
7.放置所述蜂巢状容器的方盒容器;
8.安装于所述机架,用于输送方盒容器至蜂巢状容器取放位的进料输送带;
9.安装于所述机架,以蜂巢状容器取放位为起点并垂直于所述进料输送带方向的方盒转运输送带;
10.与所述进料输送带同方向地安装于所述机架上的蜂巢状容器定位平台;
11.用于将所述蜂巢状容器从方盒容器中取出或放入的取放框;
12.安装于进料输送带侧面的所述机架上,用于带动所述取放框升降和移动的取放框驱动机构;
13.用于将所有瓶子从所述蜂巢状容器定位平台上的蜂巢状容器中取出,并运送至安装于所述机架上的瓶子暂存平台的梳状脱巢板;
14.安装于蜂巢状容器定位平台侧面的所述机架上,用于带动梳状脱巢板水平移动和升降的脱巢驱动机构;以及
15.安装于蜂巢状容器取放位侧面的所述机架上,用于将装有空的所述蜂巢状容器的所述方盒容器推送至所述方盒转运输送带的方盒容器推出机构。
16.优选的,还包括:安装于所述机架上,用于将瓶子暂存平台上的瓶子推出的瓶子推动机构。
17.优选的,所述蜂巢状容器定位平台上设有用于吸住/松开所述蜂巢状容器的真空吸嘴。
18.优选的,所述梳状脱巢板设有多道卡齿,每条卡齿位于两排瓶子中间。
19.优选的,所述取放框上设有用于吸住/松开所述蜂巢状容器的真空吸嘴。
20.优选的,取放框驱动机构和脱巢驱动机构结构相同,取放框驱动机构包括:安装上
板和安装下板,安装上板和安装下板之间固定有竖直方向驱动机构;
21.所述安装上板上安装有两个支撑竖板、两个直线轴承组件,直线轴承组件中穿有两根竖直导杆,竖直导杆可以在直线轴承组件中自由滑动,竖直导杆下端和提升横板连接;提升横板和十字安装板连接;十字安装板上安装有多个凸轮随动器;凸轮随动器和方形竖直限位杆配合;方形竖直限位杆固定在安装上板和安装下板之间;
22.在两个竖直导杆上端安装有水平安装板;在水平安装板上安装有支撑块;支撑块安装在水平安装板的两端;滑杆一安装在两个支撑块上;在滑杆一和水平安装板之间安装有若干个支撑滑杆一的支撑立柱一;滑块一中间穿有滑杆一,滑块一在滑杆一上自由滑动;在滑块一上部安装有两根小立柱,在滑块一上端安装有负载安装块;
23.所述支撑竖板上安装有滑杆二和支撑条;在滑杆二和支撑条之间安装有若干个支撑立柱二,滑块二水平穿在滑杆二上自由移动;小立柱在竖直方向上穿在滑块二上;
24.所述滑块二和连接板的上端固定,连接板下部和水平传动组件连接;水平传动组件带动连接板水平运动;水平传动组件和驱动组件连接,驱动组件为水平传动组件提供水平方向的动力;
25.所述竖直方向驱动机构驱动提升横板升降。
26.本发明的有益效果是:本发明整个过程都是全自动的,不需要人工去操作,相较于一种需要人工参与的把瓶子从蜂巢状容器中取出的设备,本发明所涉及的设备在取出瓶子时更加稳定,速度更快。本发明通过设计取放框驱动机构和脱巢驱动机构的具体结构,被设计成两个方向可以独立运动的机构。此结构在竖直运动和水平运动的过程中驱动机构和传动机构都不会跟随运动,结构轻巧,简单,效率高;并且结构稳固,可搬运重量较大的物体。
附图说明
27.图1是本发明的全自动把瓶子从蜂巢状容器中取出的设备的轴测图;
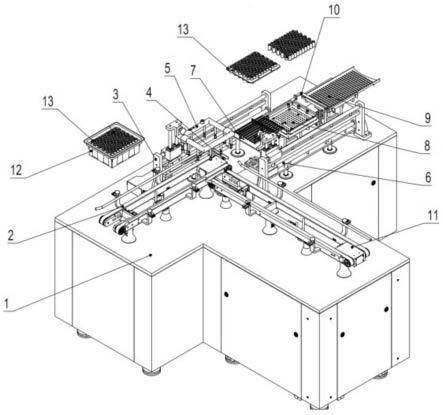
28.图2是本发明的全自动把瓶子从蜂巢状容器中取出的设备的另一视角轴测图;
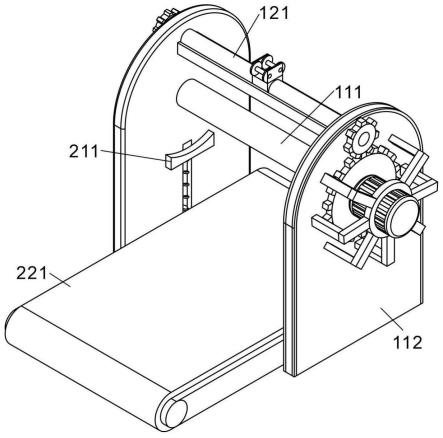
29.图3是本发明中取放框驱动机构的结构图。
具体实施方式
30.下面将结合附图对本发明作进一步说明。
31.请参阅图1、图2,本发明的一种全自动瓶子取出装置,包括机架1、对方盒容器12、蜂巢状容器13、取放框5、梳状脱巢板7,以及安装在机架1上的进料输送带2、取放框驱动机构3、方盒容器推出机构4、脱巢驱动机构6、蜂巢状容器定位平台8、瓶子暂存平台9、瓶子推动机构10、方盒转运输送带11。整台设备需要对方盒容器12、蜂巢状容器13、瓶子进行操作,最终使瓶子从蜂巢状容器中变成单个散装的状态。
32.本发明中,蜂巢状容器13装有瓶子。方盒容器12放置蜂巢状容器13。进料输送带2用于输送方盒容器12至蜂巢状容器取放位。的方盒转运输送带11以蜂巢状容器取放位为起点并垂直于进料输送带2方向设置。蜂巢状容器定位平台8与进料输送带2同方向地安装于机架1上。
33.蜂巢状容器定位平台8上设有用于吸住/松开蜂巢状容器13的真空吸嘴,取放框5用于将蜂巢状容器13从方盒容器12中取出或放入,取放框5上也设有用于吸住/松开蜂巢状
容器13的真空吸嘴。取放框驱动机构3安装于进料输送带2侧面的机架1上,用于带动取放框5升降和移动。梳状脱巢板7用于将所有瓶子从蜂巢状容器定位平台8上的蜂巢状容器13中取出,并运送瓶子暂存平台9。梳状脱巢板7设有多道卡齿,每条卡齿位于两排瓶子中间;脱巢驱动机构6安装于蜂巢状容器定位平台8侧面的机架1上,用于带动梳状脱巢板7水平移动和升降。方盒容器推出机构4安装于蜂巢状容器取放位侧面的机架1上,用于将装有空的蜂巢状容器13的方盒容器12推送至方盒转运输送带11。瓶子推动机构10安装于机架1上,用于将瓶子暂存平台9上的瓶子推出。
34.工作原理如下:
35.整台设备运行时,进料输送带2把带有瓶子和蜂巢状容器的方盒容器13转运到蜂巢状容器取放位,取放框驱动机构3带动取放框5下降,并用真空吸嘴吸住蜂巢状容器13,取放框5上升把蜂巢状容器13从方盒容器12中取出。取放框驱动机构3带动取放框5,把蜂巢状容器13转运到蜂巢状容器定位平台8,取放框5和蜂巢状容器13脱离,取放框5上升。蜂巢状容器定位平台8对蜂巢状容器13进行定位,同时,蜂巢状容器定位平台8上的真空吸嘴把蜂巢状容器13吸紧。脱巢驱动机构6带动梳状脱巢板7向前运动,直到覆盖所有的瓶子,梳状脱巢板7中间的卡齿位于两排瓶子中间。脱巢驱动机构6带动梳状脱巢板7上升,此时蜂巢状容器13中所有的瓶子14被取出。在瓶子全部被取出后,蜂巢状容器定位平台8上的真空吸嘴松开,释放空的蜂巢状容器13。梳状脱巢板7继续向前运动,到瓶子暂存平台9上方时停下,然后梳状脱巢板7带着瓶子向下运动,直到瓶子底部和瓶子暂存平台9接触。取放框5下降,吸住空的蜂巢状容器13,然后上升后往回走,把空的蜂巢状容器13放回空的方盒容器12中。方盒容器推出机构4把带有空蜂巢容器的方盒容器12推到方盒转运输送带11上,方盒转运输送带11把方盒容器12运送到设备外部。在取放框5吸取空巢板往空方盒容器12方向走的同时,梳状脱巢板7往回走,直到梳状脱巢板7和所有瓶子完全脱离,此时瓶子都在瓶子暂存平台9上,瓶子推动机构10把所有的瓶子沿着瓶子暂存平台9推出设备,完成所有动作,等待下一盒进入设备。
36.针对不同规格的方盒容器12,不同规格的蜂巢状容器13,不同规格的瓶子时,此设备只需做一些简单的调整就能实现;在针对不同的方盒容12进料时只需要调整进料输送带2上的旋钮,然后调整相关的护栏,调整后拧紧旋钮即可;在不同的方盒容器12出料时,只需要调整方盒转运输送带11上的旋钮,然后调整相关的护栏,调整后拧紧旋钮即可;在取放不同的方盒状容器12时,更换对应的取放框5来实现,更换简单;在针对同规格的蜂巢状容器13,通过更换不同的蜂巢状容器定位平台8和梳状脱巢板7来实现;针对不同的瓶子,只需更换对应的梳状脱巢板7;以此来实现兼容不同地瓶子。
37.特别地,取放框驱动机构和脱巢驱动机构结构相同。如图3所示,取放框驱动机构包括:安装上板3-1和安装下板3-2,安装下板3-2安装在机架1上,在安装上板3-1和安装下板3-2之间固定有竖直方向驱动机构3-3。竖直方向驱动机构3-3能提供竖直方向的动力。安装上板3-1上安装有两个支撑竖板3-4、两个直线轴承组件3-5。直线轴承组件3-5中穿有两根竖直导杆3-6。竖直导杆3-6可以在直线轴承组件3-5中自由滑动,竖直导杆3-6下端和提升横板3-21连接。提升横板3-21和十字安装板3-22连接。十字安装板3-22上安装有3-4个凸轮随动器3-23。凸轮随动器3-23和方形竖直限位杆3-24配合。方形竖直限位杆3-24固定在安装上板3-1和安装下板3-2之间。目的是保证在水平方向上搬运较重的物体时不会发生太
大的倾斜,使运行更加平稳。在两个竖直导杆3-6上端安装有水平安装板3-7。在水平安装板3-7上安装有支撑块3-8。支撑块3-8安装在水平安装板3-7的两端。滑杆一3-9安装在两个支撑块3-8上。在滑杆一3-9和水平安装板3-7之间安装有若干个支撑滑杆一的支撑立柱一3-10,安装多个支撑立柱一3-10的目的是为了加强滑杆一3-9的强度。滑块一3-11中间穿有滑杆一3-9,滑块一3-11可以在滑杆一3-9上自由滑动。在滑块一3-11上部安装有两根小立柱3-16,可跟随滑块一3-11上下运动。在滑块一3-11上端安装有负载安装块3-17。负载安装块3-17可根据需要安装不同的负载,来实现不同的功能。
38.上下运动的提升横板3-21上固定有十字安装板3-22,十字安装板3-22固定有凸轮随动器3-23,凸轮随动器3-23包裹在方形竖直限位杆3-24两边。这样可以保证在搬运物体时,能保持整个提升机构是竖直状态,运行更稳定。
39.支撑竖板3-4上安装有滑杆二3-14、支撑条3-12。在滑杆二3-14和支撑条3-12之间安装有若干个支撑立柱二3-13,来加强机构的强度。在负载一些较重的物体时保证整个机构不会变形。滑块二3-15水平穿在滑杆二3-14上,可以自由移动。小立柱3-16在竖直方向上穿在滑块二3-15上。滑块二3-15运动时会带动小立柱3-16、滑块一3-11、负载安装块3-17同时运动。
40.滑块二3-15和连接板3-18的上端固定,连接板3-18下部和水平传动组件3-19连接。水平传动组件3-19带动连接板3-18水平运动。水平传动组件3-19和驱动组件3-20连接,驱动组件3-20为水平方向的运动提供动力。
41.水平方向上,驱动组件3-20和水平传动组件3-19带动连接板3-18在水平方向运动,滑块二3-15、小立柱3-16、负载安装块3-17、滑块一3-11都会和连接板3-18一起运动。驱动组件3-20主要通过伺服电机驱动和减速机实现,水平传动组件3-19通过同步带机构实现,这样可以实现在水平方向上的精确定位。
42.竖直方向上,竖直方向驱动机构3-3给整个竖直方向上提供动力,竖直方向驱动机构3-3带动提升横板3-21、十字安装板3-22、凸轮随动器3-23、竖直导杆3-6、水平安装板3-7、支撑块3-8、滑杆一3-9、支撑立柱3-10、滑块一3-11、小立柱3-16、负载安装块3-17一起上升和下降运动。小立柱3-16可以在滑块二3-15中自由运动,这样在两个独立驱动结构的驱动下就实现了负载在不同位置的转运。竖直方向驱动机构3-3主要通过伺服电机提供动力,带动减速机,减速机带动同步带,同时安装在同步带上的固定零件带动相关的机构在竖直方向上运动。这样在水平和竖直两个方向上对应的位置实现精确的定位。
43.此设备不仅能完成以上所描述的功能。针对与此种类似包装的瓶子,如果不需要从蜂巢状容器13中取出,可以使用此设备中的进料输送带2、方盒容器推出机构4、方盒转运输送带11组合成出料结构;此出料结构通过进料输送带2把方盒容器转运到进料输送带2的尽头,然后方盒容器推出机构4把方盒容器12推入方盒转运输送带11上,方盒转运输送带11把方盒输送到设备外部。这样就实现了一台设备有多种使用场景。
44.以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本发明的范畴,应由各权利要求所限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。