技术特征:
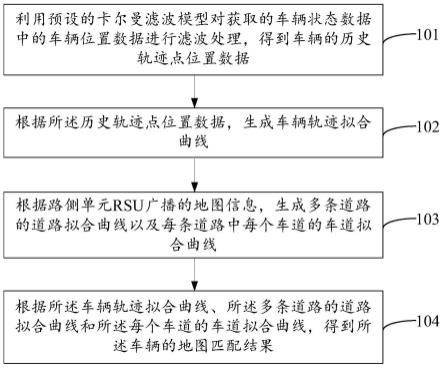
1.一种地图匹配方法,其特征在于,包括:利用预设的卡尔曼滤波模型对获取的车辆状态数据中的车辆位置数据进行滤波处理,得到车辆的历史轨迹点位置数据;根据所述历史轨迹点位置数据,生成车辆轨迹拟合曲线;根据路侧单元rsu广播的地图信息,生成多条道路的道路拟合曲线以及每条道路中每个车道的车道拟合曲线;根据所述车辆轨迹拟合曲线、所述多条道路的道路拟合曲线和所述每个车道的车道拟合曲线,得到所述车辆的地图匹配结果。2.根据权利要求1所述的地图匹配方法,其特征在于,所述利用预设的卡尔曼滤波模型对获取的车辆状态数据中的车辆位置数据进行滤波处理,得到车辆的历史轨迹点位置数据,包括:根据所述预设的卡尔曼滤波模型和所述车辆状态数据,得到与所述车辆位置数据对应的车辆最优估计位置数据;根据所述车辆最优估计位置数据和所述车辆位置数据,得到所述车辆位置数据中的跳变点位置数据和非跳变点位置数据;将所述非跳变点位置数据和所述跳变点位置数据对应的车辆最优估计位置数据作为所述车辆的历史轨迹点位置数据。3.根据权利要求2所述的地图匹配方法,其特征在于,所述根据所述预设的卡尔曼滤波模型和所述车辆状态数据,得到与所述车辆位置数据对应的车辆最优估计位置数据,包括:根据第一时刻的车辆状态数据和第二时刻的车辆状态数据,确定所述预设的卡尔曼滤波模型中所述第二时刻的状态转换矩阵、映射矩阵和所述第一时刻的状态观测矩阵;所述映射矩阵为所述预设的卡尔曼滤波模型中的控制输入矩阵将所述第二时刻的车辆状态数据映射到状态向量上的矩阵;根据所述第二时刻的车辆最优状态数据、所述第二时刻的状态转换矩阵和所述第二时刻的映射矩阵,得到所述第一时刻的车辆预测状态数据;根据所述第二时刻的协方差矩阵、所述第二时刻的状态转换矩阵和所述预设的卡尔曼滤波模型中预设的预测过程噪声向量,得到所述第一时刻的预测估计协方差矩阵;根据所述第一时刻的车辆状态数据、所述第一时刻的车辆预测状态数据、所述第一时刻的状态观测矩阵和所述第一时刻的预测估计协方差矩阵,确定所述第一时刻的车辆最优状态数据,所述第一时刻的车辆最优状态数据包括所述第一时刻的车辆位置数据对应的所述第一时刻的车辆最优估计位置数据;其中,所述第一时刻的车辆状态数据为除首个时刻的车辆状态数据之外的任一时刻的车辆状态数据;所述第二时刻的车辆最优状态数据为所述第二时刻的车辆状态数据,或,所述第二时刻的车辆最优状态数据是根据所述第二时刻的车辆状态数据、所述第二时刻的车辆预测状态数据、所述第二时刻的状态观测矩阵和所述第二时刻的预测估计协方差矩阵确定的;所述第二时刻为所述第一时刻之前一个时刻;所述第一时刻的车辆位置数据为所述车辆位置数据中,除首个时刻的车辆位置数据之外的任一时刻的车辆位置数据;
所述第二时刻的协方差矩阵为预先设定的协方差矩阵,或,所述第二时刻的协方差矩阵是根据第三时刻的协方差矩阵、所述第三时刻的状态转换矩阵和所述预设的卡尔曼滤波模型中预设的预测过程噪声向量得到的;所述第三时刻为所述第二时刻之前的一个时刻。4.根据权利要求3所述的地图匹配方法,其特征在于,所述车辆状态数据包括车辆速度、车辆航向角、车辆横摆角速度和所述车辆位置点的数据;所述根据第一时刻的车辆状态数据和第二时刻的车辆状态数据,确定所述预设的卡尔曼滤波模型中所述第二时刻的状态转换矩阵、映射矩阵和第一时刻的状态观测矩阵,包括:在所述第二时刻的车辆横摆角速度不等于0的情况下,根据所述第一时刻的车辆位置数据、所述第一时刻的车辆航向角、所述第二时刻的车辆位置数据、所述第二时刻的车辆航向角、所述第二时刻的车辆速度和所述第二时刻的车辆横摆角速度,得到所述预设的卡尔曼滤波模型中所述第二时刻的状态转换矩阵、映射矩阵和第一时刻的状态观测矩阵;在所述第二时刻的车辆横摆角速度等于0的情况下,根据所述第一时刻的车辆位置数据、所述第一时刻的车辆航向角、所述第二时刻的车辆位置数据、所述第二时刻的车辆航向角和所述第二时刻的车辆速度,得到所述预设的卡尔曼滤波模型中所述第二时刻的状态转换矩阵、映射矩阵和第一时刻的状态观测矩阵。5.根据权利要求3所述的地图匹配方法,其特征在于,所述根据所述第一时刻的车辆状态数据、所述第一时刻的车辆预测状态数据、所述第一时刻的状态观测矩阵和所述第一时刻的预测估计协方差矩阵,确定所述第一时刻的车辆最优状态数据,包括:根据所述第一时刻的车辆状态数据、所述第一时刻的车辆预测状态数据和所述第一时刻的状态观测矩阵,得到所述第一时刻的测量余量;根据所述第一时刻的预测估计协方差矩、所述第一时刻的状态观测矩阵和所述预设的卡尔曼滤波模型中预设的观测噪声向量,得到所述第一时刻的最优卡尔曼增量;根据所述第一时刻的车辆预测状态数据、所述第一时刻的测量余量和所述第一时刻的最优卡尔曼增量,得到所述第一时刻的车辆最优状态数据。6.根据权利要求4所述的地图匹配方法,其特征在于,所述根据所述第一时刻的车辆预测状态数据、所述第一时刻的测量余量和所述第一时刻的最优卡尔曼增量,得到所述第一时刻的车辆最优状态数据之后,所述方法还包括:根据所述预设的卡尔曼滤波模型中预设的单元矩阵、所述第一时刻的最优卡尔曼增量、所述第一时刻的状态观测矩阵和所述第一时刻的预测估计协方差矩阵,得到所述第一时刻的协方差矩阵。7.根据权利要求2所述的地图匹配方法,其特征在于,所述根据所述车辆最优估计位置数据和所述车辆位置数据,得到所述车辆位置数据中的跳变点位置数据和非跳变点位置数据,包括:根据所述车辆最优估计位置数据和所述车辆位置数据,得到所述车辆最优估计位置与所述车辆位置数据之间的距离;在所述车辆最优估计位置与所述车辆位置数据之间的距离大于预设距离的情况下,确定所述车辆位置数据为所述跳变点位置数据;在所述车辆最优估计位置与所述车辆位置数据之间的距离小于或等于预设距离的情
况下,确定所述车辆位置数据为所述跳变点位置数据。8.根据权利要求1所述的地图匹配方法,其特征在于,所述根据所述历史轨迹点位置数据,生成车辆轨迹拟合曲线,包括:根据所述历史轨迹点位置数据,生成车辆轨迹初始拟合曲线和所述历史轨迹点位置数据的误差平方和;根据所述车辆轨迹初始拟合曲线和所述历史轨迹点位置数据的误差平方和,得到所述车辆轨迹拟合曲线。9.根据权利要求1所述的地图匹配方法,其特征在于,所述地图信息包括多条道路的中心点坐标数据和每条道路中每个车道的中心点坐标数据;所述根据路侧单元rsu广播的地图信息,生成多条道路的道路拟合曲线以及每条道路中每个车道的车道拟合曲线,包括:根据多条道路中每条道路的中心点坐标数据,生成每条道路的道路初始拟合曲线和每条道路的中心点坐标数据的误差平方和;根据所述每条道路的道路初始拟合曲线和对应的所述每条道路的中心点坐标数据的误差平方和,得到多条道路的道路拟合曲线中的每条道路的道路拟合曲线;根据每条道路中每个车道的中心点坐标数据,生成每个车道的车道初始拟合曲线和每个车道的中心点坐标数据的误差平方和;根据所述每个车道的车道初始拟合曲线和对应的所述每个车道的中心点坐标数据的误差平方和,得到每个车道的车道拟合曲线。10.根据权利要求1所述的地图匹配方法,其特征在于,所述根据所述车辆轨迹拟合曲线、所述多条道路的道路拟合曲线和所述每个车道的车道拟合曲线,得到所述车辆的地图匹配结果,包括:利用预设的弗朗明歇距离算法,得到所述车辆拟合曲线与所述每条道路的道路拟合曲线之间的第一相似度;选取所述第一相似度最大的道路拟合曲线对应的道路为目标道路;利用所述预设的弗朗明歇距离算法,得到所述车辆拟合曲线与所述目标道路中每条车道的车道拟合曲线之间的第二相似度;选取所述第二相似度最大的车道拟合曲线对应的车道为目标车道;将所述目标道路和所述目标车道作为所述车辆的地图匹配结果。11.一种地图匹配装置,其特征在于,包括:第一处理模块,用于利用预设的卡尔曼滤波模型对获取的车辆状态数据中的车辆位置数据进行滤波处理,得到车辆的历史轨迹点位置数据;第一曲线生成模块,用于根据所述历史轨迹点位置数据,生成车辆轨迹拟合曲线;第二曲线生成模块,用于根据路侧单元rsu广播的地图信息,生成多条道路的道路拟合曲线以及每条道路中每个车道的车道拟合曲线;第二处理模块,用于根据所述车辆轨迹拟合曲线、所述多条道路的道路拟合曲线和所述每个车道的车道拟合曲线,得到所述车辆的地图匹配结果。12.一种地图匹配设备,其特征在于,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如权利要求1至10中任一
项所述的地图匹配方法。13.一种可读存储介质,其特征在于,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如权利要求1至10中任一项所述的地图匹配方法中的步骤。
技术总结
本发明提供了一种地图匹配方法、装置和设备,涉及车联网技术领域,该方法包括:利用预设的卡尔曼滤波模型对获取的车辆状态数据中的车辆位置数据进行滤波处理,得到车辆的历史轨迹点位置数据;根据所述历史轨迹点位置数据,生成车辆轨迹拟合曲线;根据路侧单元RSU广播的地图信息,生成多条道路的道路拟合曲线以及每条道路中每个车道的车道拟合曲线;根据所述车辆轨迹拟合曲线、所述多条道路的道路拟合曲线和所述每个车道的车道拟合曲线,得到所述车辆的地图匹配结果。本发明方案,即通过卡尔曼滤波算法对车辆位置数据进行滤波处理,增加车辆位置数据的稳定性和可靠性,减少车辆位置误差,提高地图匹配的准确性。提高地图匹配的准确性。提高地图匹配的准确性。
技术研发人员:徐波 赵铮 于艳超 董书霞
受保护的技术使用者:中信科智联科技有限公司
技术研发日:2022.11.07
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。