技术特征:
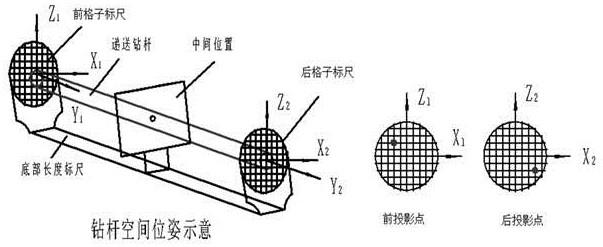
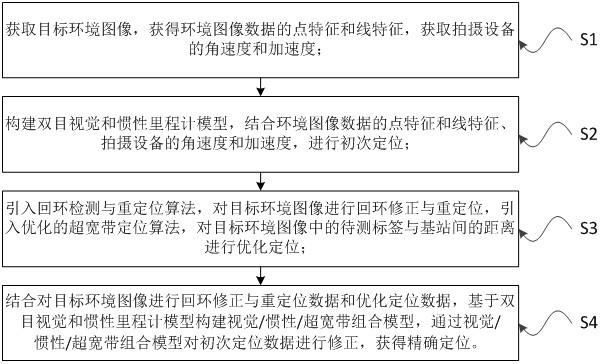
1.一种煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,该方法能测试出煤矿井下钻杆装卸机器人送杆识别系统送杆空间位姿的精度;所述煤矿井下钻杆装卸机器人送杆识别系统包括设在钻杆装卸车体上的杆箱、机械臂、机械臂末端的柔性手爪、单目相机和钻杆辅助定位装置,以及设在钻进车体上的自对中的夹持器以及设在夹持器前方两侧的双合作靶标;所述钻杆辅助定位装置位于机械臂前方,钻杆辅助定位装置能对机械臂抓取的钻杆进行定位以消除钻杆长度方向的误差,然后机械臂能再将定位后的钻杆送至夹持器;该精度测试方法包括以下步骤:步骤一,在钻杆两端安装高精度点状激光发射模组:先将激光发射模组安装至过渡接头内,再将过渡接头螺接在钻杆两端,将固定吊锤的钢丝线绕钻杆中间的沟槽固定;步骤二,安装格子标尺和底部长度标尺:将两个格子标尺分别安装在夹持器前端和动力头前端,两个格子标尺平行相对且正对齐,格子标尺中心与夹持器、动力头中心同心,两个格子标尺能用于计算递送钻杆径向误差以及俯仰角和偏航角误差;将底部长度标尺水平安装在夹持器和动力头之间的导轨上,两个格子标尺中心连线的中点是钻杆理论递送中心位置,底部长度标尺能测量递送钻杆轴向误差;步骤三,机械臂及柔性手爪将钻杆递送至夹持器和动力头之间以进行夹持交接的空间位置;步骤四,激光发射模组光点投射在两端的格子标尺上,两个格子标尺上分别建立空间直角坐标系,均以格子标尺的中心为坐标原点,水平方向为x轴方向,竖向为z轴方向,两个格子标尺中心连线方向为y轴方向,记录光点在两端格子标尺x、z方向的投影偏移量,记录钻杆在底部长度标尺上吊锤位置的轴向值;利用oxyz坐标系与中心轴关系计算出钻杆径向和轴向误差,俯仰角和偏航角误差,从而精确测试出煤矿井下钻杆装卸机器人送杆空间位姿的精度;所述俯仰角α为:α=arctan(a b)/d;其中,a和b为两个格子标尺上z轴方向的读数,d为两个格子标尺之间的距离;由上述俯仰角α可得a0=(d/2)*tanα,a0为理论钻杆递送位置中心线在z轴方向的读数,则在zoy坐标系中径向误差
△
z=a-a0;所述偏航角β为:β=arctan(e f)/d;其中,e和f为两个格子标尺上x轴方向的读数,d为两个格子标尺之间的距离;由上述偏航角β可得e0=(d/2)*tanβ,e0为理论钻杆递送位置中心线在x轴方向的读数,则在xoy坐标系中径向误差
△
x=e-e0;轴向距离y通过吊锤中心与底部长度标尺在y方向的距离得到,即可得到轴向误差
△
y。2.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述步骤一中,激光发射模组激光发射中心严格与钻杆中心同轴;测试前将投射在两个格子标尺上的激光发射模组光斑圆点直径调节至0.5mm以下,以保证投影到格子靶标上的光斑满足测试精度要求。3.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述步骤二中,格子标尺采用不锈钢材料且为圆形,格子标尺上的正方形格子是以格子标尺圆心为基准,采用激光雕刻方式光刻而成,光刻线条粗细为0.2mm,正方形格子边长为1mm;两个格子标尺下端都设有底座,以钻进车体机身导轨为安装基准,将格子标尺螺
接在导轨上。4.如权利要求3所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,两个格子标尺分别为前格子标尺和后格子标尺,前格子标尺安装在夹持器前端,后格子标尺安装在动力头前。5.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述钻杆辅助定位装置包括底座、设在底座上的斜坡、安装在斜坡上的v形支撑架、设在斜坡下端的挡板以及接近开关;钻杆放置在v形支撑架上,斜坡的倾斜设置能使钻杆滑至挡板以对钻杆长度方向进行定位,接近开关能用于检测钻杆是否滑至挡板处。6.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述机械臂和柔性手爪用以完成递送钻杆动作;柔性手爪包括手爪、手爪接近开关和永磁铁;利用永磁铁吸合以吸取和松开钻杆,取钻杆时,当钻杆远离钻杆辅助定位装置后,手爪夹紧钻杆防止碰到障碍物掉落,放钻杆时,当机械臂将钻杆递送至夹持交接的空间位置时,夹持器夹紧钻杆,手爪松开钻杆,永磁铁消磁,松开钻杆;机械臂和柔性手爪离开送杆位置,接近开关判断钻杆是否已脱离柔性手爪,确保整个递送钻杆流程和后续流程顺利进行。7.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述夹持器包括夹持器座、卡瓦连接板、卡瓦、夹持器油缸、平动齿条和齿轮;两个卡瓦连接板设在夹持器座两侧,卡瓦装在卡瓦连接板上,卡瓦连接板两侧分别设置所述夹持器油缸和平动齿条且平动齿条位于卡瓦下方,两个卡瓦连接板所连平动齿条相互平行,在两个平动齿条之间设置所述齿轮且齿轮与两个平动齿条均啮合;当一侧的夹持器油缸缸杆运动,能通过卡瓦连接板带动平动齿条产生平动,平动齿条与齿轮啮合能将平动转换为旋转,齿轮再与另一端平动齿条啮合带动和另一端卡瓦连接板,进而使连接在卡瓦连接板上的两个卡瓦同步夹紧和松开,实现自对中功能。8.如权利要求1所述的煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,其特征在于,所述双合作靶标为两个白底黑格的棋盘格靶标,包括大棋盘格靶标和小棋盘格靶标,大棋盘格靶标为9行12列棋盘格,小棋盘格靶标为7行6列棋盘格,且表面不易发生镜面反射。
技术总结
本发明公开了一种煤矿井下钻杆装卸机器人送杆识别系统的精度测试方法,该系统包括设在钻杆装卸车体上的杆箱、机械臂、柔性手爪、单目相机和钻杆辅助定位装置,以及设在钻进车体上的自对中的夹持器以及双合作靶标;机械臂能将钻杆递送至识别的位置,使用具有柔性补偿功能的手爪与夹持器协同完成钻杆递送和夹紧交接动作;该方法是对送杆系统递送完成后,钻杆空间位姿精度的测试,当送杆至需要夹持交接的空间位置时,钻杆两端激光发射模组将光点投射在两端的格子标尺上,根据激光点在两端格子标尺投影的偏移量能计算出钻杆径向、轴向误差,俯仰和偏航角度误差。本发明能在煤矿井下钻杆装卸机器人通过视觉递送钻杆时,精确测试出送杆空间位姿的精度。杆空间位姿的精度。杆空间位姿的精度。
技术研发人员:梁春苗 姚宁平 姚亚峰 宋海涛 王小波 彭涛 潘欢欢 刘柏根
受保护的技术使用者:中煤科工西安研究院(集团)有限公司
技术研发日:2022.12.01
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。