1.本发明涉及药品食品生产领域,尤其涉及一种桌面灌装系统的控制方法及桌面灌装系统。
背景技术:
2.现有技术中的制药装备通常采用固定式触摸屏操作,而桌面型灌装加塞轧盖机体积小,没有足够的空间安装固定式触摸屏,且在实际使用过程中,需要人工上瓶到瓶托上,然后操作触摸屏启动设备对西林瓶进行灌装、加塞、轧盖,这种模式存在多种技术问题:一、每次人工上瓶过程中均需要戴手套,而进行触屏操作时则需要摘下手套,导致频繁穿戴手套,影响了人工效率;二、在灌装含有对人体有害的药物时需要将灌装加塞轧盖机整体放置到隔离器中,操作非常不便;三、在触屏控制启动灌装加塞轧盖机时,设备可能正在对上一批西林瓶进行灌装、加塞、轧盖,存在不安全因素,易导致设备故障。
技术实现要素:
3.本发明要解决的技术问题是克服现有技术的不足,提供一种稳定可靠、能提高生产效率的桌面灌装系统的控制方法以及无须频繁穿戴手套、操作方便且人工效率高的桌面灌装系统。
4.为解决上述技术问题,本发明采用以下技术方案:
5.一种桌面灌装系统的控制方法,所述桌面灌装系统包括联动滑轨、瓶托、灌装加塞机、控制器和手持控制器,所述控制器上设有检测模块、执行模块和通讯模块,所述通讯模块与所述手持控制器通过无线局域网连接,所述瓶托驱动件以及灌装加塞机均与所述控制器的执行模块连接,所述桌面灌装系统连接有可控制桌面灌装系统的控制按钮,所述检测模块与所述控制按钮连接,所述桌面灌装系统的控制方法包括以下步骤:
6.s1、启动桌面灌装系统;
7.s2、点击手持控制器上“自动模式”;
8.s3、在手持控制器上设定需要进行生产动作的瓶子数量和位置;
9.s4、将步骤s3中设定数量的瓶子放置至瓶托上的设定位置;
10.s5、按下控制按钮,瓶托带动瓶子依次经过灌装工位、加塞工位完成灌装、加塞;
11.s6、瓶托运行至下瓶位置,将完成灌装操作的瓶子取下后,按下控制按钮,瓶托回到上瓶位置;
12.s7、重复上述步骤s4至s6,直至完成全部瓶子的灌装操作。
13.作为上述技术方案的进一步改进:
14.所述手持控制器为无线手持控制器,所述瓶托与联动滑轨对接,并可沿所述联动滑轨往复移动,所述控制按钮包括设置在联动滑轨两侧的启动按钮和返程按钮,在步骤s5中,按下启动按钮,在步骤s6中,按下返程按钮。
15.在进行所述步骤s2之前,先判断所有伺服是否处于原点位置,若是,进入步骤s2;
若不是,先通过在无线手持控制器上点击“维护模式”将所有伺服返回原点,再进入步骤s2。
16.一种桌面灌装系统,包括联动滑轨、瓶托、灌装加塞机、控制器和手持控制器,所述瓶托可与所述灌装加塞机对接并沿所述联动滑轨往复移动,所述控制器上设有检测模块、执行模块和网络通讯模块,所述网络通讯模块与所述手持控制器通过无线局域网连接,所述瓶托驱动件以及灌装加塞机均与所述控制器的执行模块连接,所述桌面灌装系统连接有可控制桌面灌装系统的控制按钮,所述检测模块与所述控制按钮连接。
17.作为上述技术方案的进一步改进:
18.所述手持控制器为无线手持控制器,所述控制按钮包括启动按钮和返程按钮,所述启动按钮和返程按钮均为物理按钮且分别设置在所述联动滑轨的两侧。
19.所述桌面灌装系统还包括隔离器,所述联动滑轨、瓶托、灌装加塞机均置于所述隔离器内,所述隔离器上设有操作手套。
20.所述瓶托的驱动件为伺服电机并安装于所述联动滑轨处。
21.所述检测模块与伺服原点位置检测传感器连接。
22.所述无线手持控制器上设有显示模块、数据传输模块、网络通讯模块和数据备份模块,所述网络通讯模块与所述控制器的网络通讯模块连接。
23.所述无线手持控制器通过无线模块、交换机与所述控制器连接,所述控制器连接执行元件。
24.与现有技术相比,本发明的优点在于:
25.(1)本发明的桌面灌装系统的控制方法,生产时,先通过无线手持控制器设置需要进行生产的瓶子和数量和在瓶托上的位置,人工上瓶,按下联动滑轨处设置的控制按钮,产生启动信号,控制器接收到启动信号后,控制瓶托的驱动件和灌装加塞机动作,瓶托带动瓶子依次经过灌装加塞机的灌装工位、加塞工位完成灌装、加塞,随后,人工下瓶,再按压联动滑轨处设置的控制按钮,产生返程信号,控制器接收到返程信号后,控制瓶托的驱动件动作,带动瓶托返回原点上瓶位置,准备进行下一次动作,整个过程中,不需要频繁穿戴手套,且实现了无线控制,调试好后不需要频繁操作无线手持控制器,提高了生产效率。
26.(2)本发明的桌面灌装系统,包括联动滑轨、瓶托、灌装加塞机、控制器和无线手持控制器,瓶托可与灌装加塞机对接并沿联动滑轨往复移动,控制器上设有检测模块、执行模块和网络通讯模块,网络通讯模块与无线手持控制器通过无线局域网连接,瓶托驱动件以及灌装加塞机均与控制器的执行模块连接,联动滑轨处设有可控制桌面灌装系统的控制按钮,检测模块与控制按钮连接,生产时,先通过无线手持控制器设置需要进行生产的瓶子和数量和在瓶托上的位置,人工上瓶,按下联动滑轨处设置的控制按钮,产生启动信号,控制器接收到启动信号后,控制瓶托的驱动件和灌装加塞机动作,瓶托带动瓶子依次经过灌装加塞机的灌装工位、加塞工位完成灌装、加塞,随后,人工下瓶,再按压联动滑轨处设置的控制按钮,产生返程信号,控制器接收到返程信号后,控制瓶托的驱动件动作,带动瓶托返回原点上瓶位置,准备进行下一次动作,整个过程中,不需要频繁穿戴手套,且实现了无线控制,调试好后不需要频繁操作无线手持控制器,不仅提高了生产效率,还可以将无线手持控制器收纳起来,节省空间、便于整理。
附图说明
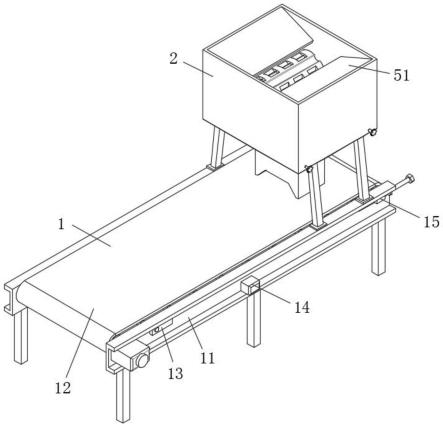
27.图1是本发明桌面灌装系统第一种实施例的俯视图。
28.图2是本发明桌面灌装系统第一种实施例的侧视图。
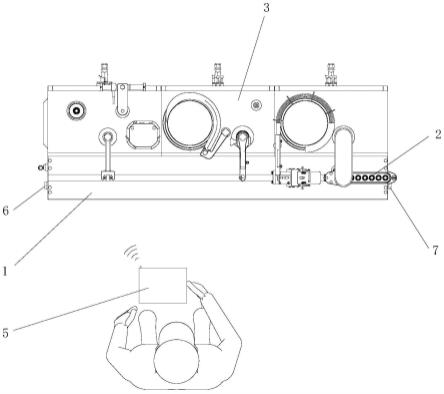
29.图3是本发明桌面灌装系统的控制器与无线手持控制器连接示意图。
30.图4是本发明桌面灌装系统第二种实施例的俯视图。
31.图5是本发明桌面灌装系统的控制方法的流程图。
32.图中各标号表示:
33.1、联动滑轨;2、瓶托;3、灌装加塞机;4、控制器;5、无线手持控制器;6、启动按钮;7、返程按钮;8、隔离器;9、无线模块;10、交换机;11、执行元件。
具体实施方式
34.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
35.图1至图3示出了本发明桌面灌装系统的一种实施例,该桌面灌装系统包括联动滑轨1、瓶托2、灌装加塞机3、控制器4和无线手持控制器5,瓶托2可与灌装加塞机3对接并沿联动滑轨1往复移动,控制器4为plc(可编程逻辑控制器),控制器4上设有检测模块,检测模块为plc的输入端,用于接收传感器、控制按钮的电信号,执行模块和通讯模块、通讯模块与无线手持控制器5通过无线局域网连接,瓶托2驱动件以及灌装加塞机3均与控制器4的执行模块连接,联动滑轨1处设有控制按钮,检测模块与控制按钮连接,生产时,先通过无线手持控制器5设置需要进行生产的瓶子和数量和在瓶托2上的位置,人工上瓶,按下联动滑轨1处设置的控制按钮,产生启动信号,控制器4接收到启动信号后,控制瓶托3的驱动件和灌装加塞机动作,瓶托2带动瓶子依次经过灌装加塞机的灌装工位、加塞工位完成灌装、加塞,随后,人工下瓶,再按压联动滑轨1处设置的控制按钮,产生返程信号,控制器4接收到返程信号后,控制瓶托2的驱动件动作,带动瓶托2返回原点上瓶位置,准备进行下一次动作,整个过程中,不需要频繁穿戴手套,且实现了无线控制,调试好后不需要频繁操作无线手持控制器5,不仅提高了生产效率,还可以将无线手持控制器5收纳起来,节省空间、便于整理。
36.本实施例中,手持控制器5为无线手持控制器,控制按钮包括启动按钮6和返程按钮7,启动按钮6和返程按钮7均为物理按钮且分别设置在联动滑轨1的两侧,操作方便,且安全性高。
37.本实施例中,瓶托2的驱动件为伺服电机并安装于联动滑轨1处。
38.本实施例中,检测模块与伺服原点位置检测传感器连接。
39.本实施例中,无线手持控制器5上设有显示模块、数据传输模块、网络通讯模块和数据备份模块,网络通讯模块与控制器4的网络通讯模块连接。
40.本实施例中,无线手持控制器5通过无线模块9、交换机10与控制器4连接,控制器4连接执行元件11。
41.图4示出了本发明桌面灌装系统的另一种实施例,本实施例与上述实施例基本相同,区别仅在于:桌面灌装系统还包括隔离器8,联动滑轨1、瓶托2、灌装加塞机3均置于隔离器8内,隔离器8上设有操作手套,便于生产对人体有害的药物,洁净度高。
42.图5是本发明桌面灌装系统的控制方法的流程图,桌面灌装系统包括联动滑轨1、瓶托2、灌装加塞机3、控制器4和手持控制器5,控制器4上设有检测模块、执行模块和通讯模
块,通讯模块与手持控制器5通过无线局域网连接,瓶托2驱动件以及灌装加塞机3均与控制器4的执行模块连接,桌面灌装系统连接有可控制桌面灌装系统的控制按钮,检测模块与控制按钮连接,桌面灌装系统的控制方法包括以下步骤:
43.s1、启动桌面灌装系统;
44.s2、点击手持控制器5上“自动模式”;
45.s3、在手持控制器5上设定需要进行生产动作的瓶子数量和位置;
46.s4、将步骤s3中设定数量的瓶子放置至瓶托2上的设定位置;
47.s5、按下控制按钮,瓶托2带动瓶子依次经过灌装工位、加塞工位完成灌装、加塞;
48.s6、瓶托2运行至下瓶位置,将完成灌装操作的瓶子取下后,按下控制按钮,瓶托2回到上瓶位置;
49.s7、重复上述步骤s4至s6,直至完成全部瓶子的灌装操作。
50.生产时,先通过手持控制器5设置需要进行生产的瓶子和数量和在瓶托2上的位置,人工上瓶,按下联动滑轨1处设置的控制按钮,产生启动信号,控制器4的检测模块接收到启动信号后,控制瓶托2的驱动件和灌装加塞机3动作,瓶托2带动瓶子依次经过灌装加塞机3的灌装工位、加塞工位完成灌装、加塞,随后,人工下瓶,再按压联动滑轨1处设置的控制按钮,产生返程信号,控制器4接收到返程信号后,控制瓶托2的驱动件动作,带动瓶托2返回原点上瓶位置,准备进行下一次动作,整个过程中,不需要频繁穿戴手套,且实现了无线控制,调试好后不需要频繁操作无线手持控制器5,提高了生产效率。
51.本实施例中,手持控制器5为无线手持控制器,瓶托2与联动滑轨1对接,并可沿联动滑轨1往复移动,控制按钮包括设置在联动滑轨两侧的启动按钮6和返程按钮7,在步骤s5中,按下启动按钮6,在步骤s6中,按下返程按钮7。
52.本实施例中,在进行步骤s2之前,先判断所有伺服是否处于原点位置,若是,进入步骤s2;若不是,先通过在无线手持控制器5上点击“维护模式”将所有伺服返回原点,再进入步骤s2。
53.虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。