技术特征:
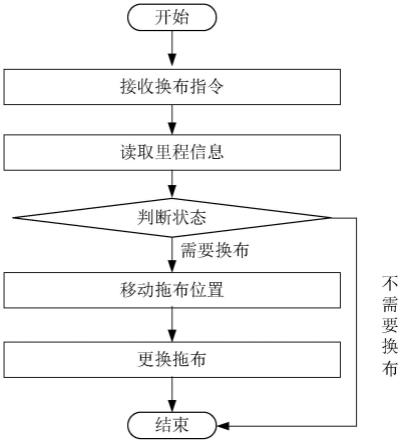
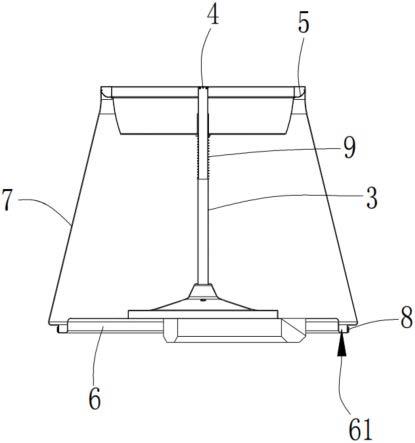
1.一种清洁机器人的换布方法,其特征在于,包括:接收输入的换布指令,进入换布程序;读取拖布的里程信息,多块所述拖布可移动地设置于所述清洁机器人;基于所述拖布的里程信息,判断所述拖布的状态信息;基于所述拖布的状态信息,驱动所述拖布移动至换布位置;更换所述拖布并重置所述拖布的里程信息。2.根据权利要求1所述的清洁机器人的换布方法,其特征在于,所述基于所述拖布的里程信息,判断所述拖布的状态信息的步骤,具体包括:显示所述拖布的里程信息;基于所述拖布的里程信息,设置所述拖布的里程阈值;基于所述拖布的里程阈值,判断所述拖布是否处于待更换的状态。3.根据权利要求2所述的清洁机器人的换布方法,其特征在于,所述里程阈值包括多个,分别用于区分所述拖布的不同状态。4.根据权利要求1所述的清洁机器人的换布方法,其特征在于,在所述重置所述拖布的里程信息之后,还包括:显示剩余所述拖布的状态信息;基于剩余所述拖布的状态信息,判断是否继续移动并更换剩余所述拖布。5.根据权利要求1至4任意一项所述的清洁机器人的换布方法,其特征在于,所述驱动所述拖布移动至换布位置的步骤,具体包括:显示待更换的所述拖布的位置信息;基于待更换的所述拖布的位置信息,排列所述拖布的更换顺序;基于所述拖布的更换顺序,移动所述待更换的拖布至换布位置。6.根据权利要求5所述的清洁机器人的换布方法,其特征在于,在所述计算所述拖布的更换顺序的步骤中,若存在无需更换的所述拖布,则继续移动以将下一块待更换的所述拖布移动至所述换布位置。7.一种清洁机器人的控制方法,其特征在于,包括:系统初始化;初始定位匹配,使用slam算法定位所述清洁机器人在环境中的位置;选择任务,等待输入指令,当收到换布指令时,执行如权利要求1至6任意一项所述的清洁机器人的换布方法;当收到清洁指令时,执行清洁方法;当所述清洁方法执行完毕后,等待新的输入指令。8.根据权利要求7所述的清洁机器人的控制方法,其特征在于,所述清洁方法包括干拖模式、湿拖模式以及扫地模式,每一模式下的所述拖布(10a)具有相应的判断状态的标准。9.一种具有自动换布功能的清洁机器人,其特征在于,包括:第一清洁机构(10),包括拖布(10a)、传送基带(10b)以及升降推杆(10c),所述拖布(10a)可拆卸地设置于所述传送基带(10b)上,所述传送基带(10b)能够转动以带动所述拖布(10a)更换位置;第二清洁机构(20),包括边刷(20a)、中刷(20b)以及垃圾箱(20c),所述边刷(20a)用于
聚拢垃圾到所述中刷(20b)附近,所述中刷(20b)用于将垃圾扫入所述垃圾箱(20c)中;行走机构(30),用于承载并驱动所述清洁机构及所述换布机构移动;以及控制机构(40),通信连接所述第一清洁机构(10)、所述第二清洁机构(20)以及所述行走机构(30),所述控制机构(40)控制所述第一清洁机构(10)执行如权利要求7或8中所述的清洁机器人的控制方法。10.根据权利要求9所述的清洁机器人,其特征在于,所述控制机构(40)包括电源模块、通信模块、执行模块,所述电源模块用于转换电压并给所述通信模块供给电力,所述通信模块用于接收输入指令并根据所述输入指令指示所述执行模块驱动所述第一清洁机构(10)、所述第二清洁机构(20)以及所述行走机构(30)执行。
技术总结
本申请涉及一种清洁机器人的换布方法,包括:接收输入的换布指令,进入换布程序;读取拖布的里程信息,多块所述拖布可移动地设置于所述清洁机器人;基于所述拖布的里程信息,判断所述拖布的状态信息;基于所述拖布的状态信息,驱动所述拖布移动至换布位置;更换所述拖布并重置所述拖布的里程信息。通过采用上述技术方案,拖布在工作地面上清洁的里程越长,则拖布越脏。通过比较拖布的里程信息,清洁机器人能够判断拖布的状态,从而确定更换拖布的时机,实现自动识别拖布状态,判断拖布是否需要更换的问题。更换的问题。更换的问题。
技术研发人员:赵斌 刘忠银 黄日兴
受保护的技术使用者:深圳市云洁科技有限公司
技术研发日:2022.11.07
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。