1.本发明涉及车辆控制技术领域,特别涉及一种电动尾翼破冰控制方法。另外,本发明还涉及一种电动尾翼控制器及车辆。
背景技术:
2.随着汽车的电动尾翼系统应用越来越广泛,对于电动尾翼系统的各个子系统的性能要求也越来越高。其中,电动尾翼控制器的主要作用是实现尾翼的动作控制;在整车车速高于展开尾翼目标值时,进行尾翼展开;在整车车速低于尾翼关闭目标时,进行尾翼关闭;以及一些其它人机交互场景下对尾翼的动作控制。
3.然而,在气温较低的环境下,如遇到雨雪天气,尾翼被冰雪覆盖,可能会出现电动尾翼被冻住,无法正常驱动电机使尾翼展开的情况。这样,不利于汽车的稳定行驶。现有技术中,常规方法是人为通过各种加热方式使冰雪覆盖区域解冻,来使尾翼可以正常动作展开,但这种方法不便于操作,也会降低用户的车辆使用体验。
技术实现要素:
4.有鉴于此,本发明旨在提出一种电动尾翼破冰控制方法,以利于改善因电动尾翼被冻结而无法展开的问题。
5.为达到上述目的,本发明的技术方案是这样实现的:
6.一种电动尾翼破冰控制方法,
7.该方法包括:
8.在电动尾翼的驱动机构的起点极限位至终点极限位的驱动行程上依次设置尾翼关闭位、破冰位和尾翼展开位,所述驱动机构运行至所述尾翼关闭位时所述电动尾翼被驱动至关闭状态,所述驱动机构运行至所述尾翼展开位时所述电动尾翼被驱动至展开状态;
9.在所述驱动机构由所述尾翼关闭位向所述破冰位运行过程中,判断所述驱动机构是否出现卡滞状态;当所述驱动机构出现所述卡滞状态且外界温度在0℃以下时,执行破冰动作;
10.所述破冰动作包括:
11.使所述驱动机构返回所述起点极限位,之后控制所述驱动机构由所述起点极限位向着所述破冰位运行。
12.进一步的,该方法还包括:
13.在所述破冰动作过程中,判断所述驱动机构是否出现所述卡滞状态;当出现所述卡滞状态时,重复所述破冰动作。
14.进一步的,对重复的所述破冰动作进行累加计数,当计数到达预设次数的所述破冰动作中仍出现所述卡滞状态时,停止继续重复,并反馈破冰失败的信息。
15.进一步的,所述尾翼关闭位至所述破冰位的行程距离为所述起点极限位至所述尾翼关闭位的行程距离的0.8~1.2倍。
16.进一步的,所述驱动机构采用电机驱动,且所述电机配置有霍尔传感器;在所述驱动机构运行过程中,当所述霍尔传感器检测的霍尔数量在设定时间内的增加量低于设定增加量时,则判定所述驱动机构出现所述卡滞状态。
17.进一步的,为所述电机设置第一驱动模式和第二驱动模式,且所述第二驱动模式下所述电机的空占比大于所述第一驱动模式下所述电机的空占比;在正常驱动所述电动尾翼时,所述电机采用第一驱动模式,在进行所述破冰动作时,所述电机采用第二驱动模式。
18.进一步的,在所述第二驱动模式下,以100%占空比驱动所述电机。
19.相对于现有技术,本发明具有以下优势:
20.本发明的电动尾翼破冰控制方法,通过为电动尾翼设置起点极限位、尾翼关闭位、破冰位等多个行程位置,可以确定因结冰造成卡滞的行程区间,结合外界温度的情况,可以判断出因结冰造成的电动尾翼被冻而使驱动机构卡滞的情况,进而通过控制驱动机构在起点极限位和破冰位之间的运动冲击,来达到破除冰冻的目的,有利于改善因电动尾翼被冻结而无法展开的问题。
21.此外,通过设置重复破冰动作的程序,可以解决部分电动尾翼冻结较为牢固情况下的破冰问题,从而提升该方法的破冰能力。对于电动尾翼冻结过于牢固,无法通过驱动机构的驱动冲击破解的情况,及时反馈破冰失败的信息,便于驾驶人员了解情况,从而采取其它方法解决电动尾翼冻结的问题。
22.本发明的另一目的在于提出一种电动尾翼控制器,该电动尾翼控制器基于本发明所述的电动尾翼破冰控制方法设置;包括控制模块、测温模块和判断模块;所述测温模块用于检测外界的温度,所述判断模块用于判断运行中的所述驱动机构是否出现所述卡滞状态、以及外界温度是否下降至0℃以下;所述控制模块用于根据所述判断模块的判断结构控制所述驱动机构执行所述破冰动作。
23.进一步的,还包括存储模块、计时模块和计数模块;所述驱动机构采用电机驱动,且所述电机配置有霍尔传感器;所述计数模块用于对所述破冰动作的重复次数进行计数,以及对所述霍尔传感器检测的霍尔数量的增加量进行计数;所述计时模块对所述电机的运行时间进行计时;所述判断模块通过判断在设定时间内的所述增加量是否低于设定增加量,来判定所述驱动机构是否出现所述卡滞状态,并通过判断所述破冰动作的重复次数是否到达预设次数,来判定是否破冰失败;所述存储模块用于存储所述设定增加量和所述预设次数。
24.相对于现有技术,本发明的电动尾翼控制器具有上述的电动尾翼破冰控制方法所具备的技术优势。通过设置控制模块和测温模块,可以及时获取外界温度的情况以及驱动机构出现卡滞状态的情况,从而及时控制驱动机构进行破冰动作,在不增加执行部件的情况下,有效改善因电动尾翼被冻结而无法展开的问题。
25.另外,通过设置存储模块、计时模块和计数模块,可存储设定增加量、预设次数等设定值,以及所需要的计数、计时功能,可很好地实现上述电动尾翼破冰控制方法中卡滞状态判定、破冰失败情况判断等方法策略。
26.本发明的另一目的在于提出一种车辆,所述车辆上配置有电动尾翼;所述电动尾翼采用本发明所述的电动尾翼控制器进行控制。本发明的车辆具有上述的电动尾翼控制器所具备的技术优势。
附图说明
27.构成本发明的一部分的附图,是用来提供对本发明的进一步理解,本发明的示意性实施例及其说明是用于解释本发明,其中涉及到的前后、上下等方位词语仅用于表示相对的位置关系,均不构成对本发明的不当限定。在附图中:
28.图1为本发明实施例一所述的电动尾翼破冰控制方法中驱动机构的驱动行程上各个位置的关系示意图;
29.图2为本发明实施例一所述的电动尾翼破冰控制方法的步骤流程示意图;
30.图3为本发明实施例一所述的电动尾翼破冰控制方法中破冰动作的控制步骤流程示意图;
31.图4为本发明实施例二所述的电动尾翼控制器的系统构成示意图;
32.附图标记说明:
33.1、控制模块;10、测温模块;
34.2、判断模块;20、存储模块;
35.3、计时模块;30、计数模块;
36.5、驱动机构;50、驱动行程;50a、展开行程;50b、破冰行程;
37.500、起点极限位;501、终点极限位;502、尾翼关闭位;503、尾翼展开位;504、破冰位;505、机构关闭硬止点;506、机构展开硬止点;
38.51、电机;52、霍尔传感器。
具体实施方式
39.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
40.在本发明的描述中,除非另有明确的限定,术语“安装”、“相连”、“连接”、“连接件”应做广义理解。例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,亦或是两个元件内部的连通。对于本领域的普通技术人员而言,可以结合具体情况理解上述术语在本发明中的具体含义。
41.下面将参考附图并结合实施例来详细说明本发明。
42.实施例一
43.本实施例涉及一种电动尾翼破冰控制方法,有利于改善因电动尾翼被冻结而无法展开的问题;其一种示例性控制步骤流程如图1和图2所示。
44.整体而言,该电动尾翼破冰控制方法主要包括以下内容:
45.首先,结合电动尾翼的展开和关闭动作需要,为电动尾翼的驱动机构5设置如图1所示的驱动行程50,该驱动行程50完全涵盖电动尾翼从关闭到完全展开的整个的展开行程50a。驱动行程50的两端分别为起点极限位500和终点极限位501;展开行程50a的两端分别为尾翼关闭位502和尾翼展开位503。
46.起点极限位500位于尾翼关闭位502的外侧,即在驱动机构5驱使电动尾翼关闭时,当电动尾翼到达关闭状态后,驱动机构5到达尾翼关闭位502,此后驱动机构5可以继续行进到达起点极限位500;在驱使电动尾翼展开时,驱动机构5自起点极限位500出发,到达尾翼
关闭位502后才带动电动尾翼开始展开动作。上述的设置要求,可以通过电动尾翼和驱动机构5之间的弹性连接、以及电动尾翼和车身之间设置的硬性限位等方式来实现。例如,可以在车身上设置一个软性限位结构,当电动尾翼到达关闭状态时电动尾翼被该软性限位阻挡;同时,还可以在起点极限位500和尾翼关闭位502之间设置一个机构关闭硬止点505,当驱动机构5带动电动尾翼继续向着关闭方向摆动,电动尾翼可以软性限位的阻挡继续小幅度微摆,通过在车身上设置硬性限位结构,当硬性限位限制电动尾翼进一步动作时,驱动机构5到达机构关闭硬止点505;此刻,即使驱动机构5继续运转,电动尾翼也将不再摆动;由于电动尾翼和驱动机构5之间或者驱动机构5内传动部件中的弹性连接设置,驱动机构5可以继续运转到达自身极限位置的起点极限位500。
47.同样的,终点极限位501位于尾翼展开位503的外侧,还可以在终点极限位501和尾翼展开位503之间设置机构展开硬止点506。在正常控制电动尾翼展开和关闭时,控制驱动机构5仅在机构关闭硬止点505和机构展开硬止点506之间动作即可,这样可给予位于关闭状态和完全展开状态的电动尾翼一个约束力,避免由于驱动机构5和电动尾翼之间传动结构的装配间隙造成的电动尾翼出现旷动的问题。
48.重要的是,在尾翼关闭位502和尾翼展开位503之间还设有破冰位504,起点极限位500至破冰位504之间形成破冰行程50b。结合图2所示,本实施例的电动尾翼破冰控制方法执行如下步骤:
49.s1、驱动机构5由尾翼关闭位502向破冰位504运行(当然,也可以是驱动机构5从机构关闭硬止点505出发,到达尾翼关闭位502后继续前进,带动电动尾翼开始展开动作;由尾翼关闭位502向破冰位504的运行过程正好对应电动尾翼开始展开的过程)。
50.s2、判断驱动机构5是否出现卡滞状态;如未出现,则转移至步骤s5;如出现,则进行后续的s3。
51.s3、判定外界温度是否在0℃以下;如是,可以基本判定电动尾翼被冻结,则执行步骤s4的破冰动作;否则,可转移至步骤s6。
52.s4、执行破冰动作。
53.s5、驱动机构5继续向着尾翼展开位503方向运行(说明电动尾翼未被冻结,执行正常的展开即可)。
54.s6、反馈故障信息(说明可能出现了非冻结情况的驱动异常,提醒检修处理即可)。
55.对于上述的步骤s4,即破冰动作的主要内容为控制驱动机构5返回起点极限位500,之后控制驱动机构5由起点极限位500向着破冰位504运行。这样,可以利用起点极限位500和尾翼关闭位502之间的空载加速行程区间,给予电动尾翼一个冲击力,以达到冲破电动尾翼和车身之间结冰的目的。
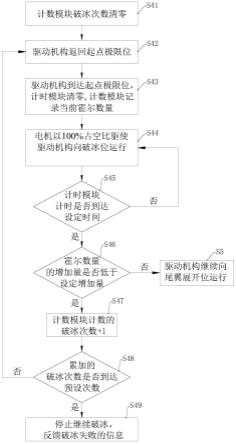
56.具体来说,如图3并结合实施例二中的图4所示,破冰动作优选采用如下的控制步骤:
57.s41、利用计数模块30对破冰次数计数,首先对破冰次数清零。
58.s42、控制驱动机构5返回起点极限位500。
59.s43、驱动机构5到达起点极限位500,利用计时模块3计时,首先计时清零,并利用计数模块30记录驱动机构5的电机51的霍尔数量。
60.s44、电机51以100%占空比驱使驱动机构5向破冰位504运行。
61.s45、判断计时模块3计时是否到达设定时间;如是则执行后续的步骤s46,如否则返回步骤s44。
62.s46、判断霍尔数量的增加量是否低于设定增加量;如是则执行后续的步骤s47,如否则转至上述的步骤s5。
63.s47、计数模块计数的破冰次数 1。
64.s48、判断累加的破冰次数是否到达预设次数;如是则执行后续的步骤s9,如否则返回步骤s42。
65.s49、停止继续破冰,并反馈破冰失败的信息。
66.在上述的步骤s44至步骤s46中,可以判断驱动机构5是否出现卡滞状态。该判断卡滞状态的方法也适用于步骤s2中是否出现卡滞状态的判断。在步骤s46中可以判断处是否出现了卡滞状态,当出现卡滞状态且破冰次数累计还未到达预设次数是,则返回步骤s42,重复破冰动作。通过设置重复破冰动作的程序,可以解决部分电动尾翼冻结较为牢固情况下的破冰问题,从而提升该方法的破冰能力。
67.在步骤步骤s47至s49中,对重复的破冰动作进行累加计数,当计数到达预设次数的破冰动作中仍出现卡滞状态时,停止继续重复,并反馈破冰失败的信息。这样的设置,对于电动尾翼冻结过于牢固,无法通过驱动机构5的驱动冲击破解的情况,可及时反馈破冰失败的信息,便于驾驶人员了解情况,从而采取其它方法解决电动尾翼冻结的问题。
68.上述的预设次数、设定时间和设定增加量可根据驱动机构5以及电机51的配置情况合理设置。例如,预设次数可设置为3次;设定时间应为正常情况下驱动机构5完成破冰行程50b所需要的时间(本实施例的驱动机构5所需为起点极限位500ms),设定增加量应为正常情况下驱动机构5完成破冰行程50b过程中电机51的霍尔数量的增加量(本实施例的电机51所需为100)。
69.如图1所示,本实施例中,破冰位504设置在靠近尾翼关闭位502的位置,优选地,尾翼关闭位502至破冰位504的行程距离为起点极限位500至尾翼关闭位502的行程距离的0.8~1.2倍。将尾翼关闭位502至破冰位504的行程设置的和起点极限位500至尾翼关闭位502的行程大致相当,使整个破冰行程50b被划分为位于起点极限位500至尾翼关闭位502之间的加速蓄力行程区间、以及位于尾翼关闭位502至破冰位504之间的实际破冰行程区间,可以提升破冰的能力,并确保破冰真正成功(当驱动机构5可以到达破冰位504时,电动尾翼已经离开关闭状态的位置一定距离,此时冻结的冰必然被破坏)。
70.如步骤s43、步骤s46中提到的,本实施例的驱动机构5采用电机51驱动,而且电机51配置有霍尔传感器52。在驱动机构5运行过程中,当霍尔传感器52检测的霍尔数量在设定时间内的增加量低于设定增加量时,则判定驱动机构5出现卡滞状态。采用电机51驱动驱动机构5,具有技术成熟可靠,且便于控制的特点;通过霍尔传感器52实时检测电机51的运行旋转角度,可以及时获知驱动机构5的运行行程变化情况。将起点极限位500至破冰位504的行程区间对应的电机51的霍尔数量作为设定增加量,当检测到霍尔传感器52的霍尔数量增加量到达设定增加量时,即可确定驱动机构5到达破冰位504。通过上述的设置,可以准确地获知破冰成功与否、亦或在破冰行程50b过程中出现了卡滞状态的情况。
71.此外,本实施例的电机51设置有第一驱动模式和第二驱动模式两种模式,而且第二驱动模式下电机51的空占比大于第一驱动模式下电机51的空占比。在正常驱动电动尾翼
复位的循环破冰策略,当第一次破冰失败后,则会再以最大占空比驱动电机51进行第二次破冰,直到破冰成功或者达到破冰次数的预设次数则退出破冰,能有效提高电动尾翼的破冰成功率。
83.这样就解决了气温较低的环境下电动尾翼被冻住而无法展开的问题,不需要人为去进行加热等操作去解冻冰层,可提升车辆用户的使用体验。
84.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。