技术特征:
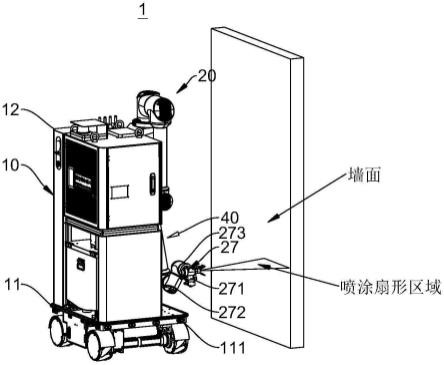
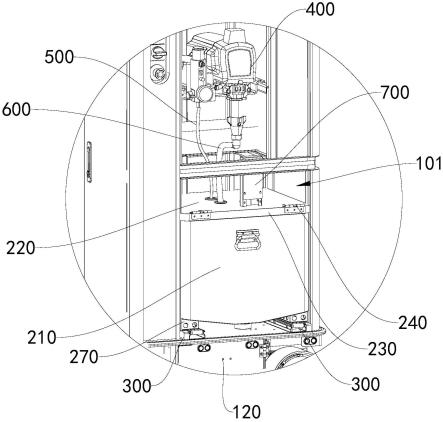
1.一种机器人,其特征在于,包括;机器人本体,所述机器人本体具有收纳空间;机械手,所述机械手包括基座、第一旋转关节、第一机械臂、第二旋转关节及第二机械臂,所述基座与机器人本体连接,所述第一旋转关节与所述基座转动连接,所述第一机械臂一端与所述第一旋转关节连接,另一端与所述第二旋转关节连接,所述第二机械臂与所述第二旋转关节连接,所述第一旋转关节与第二旋转关节均能够绕自身轴线转动,所述第一旋转关节的轴线与所述第二旋转关节的轴线平行,且所述机械手能够完全收纳于所述收纳空间,当所述机械手处于收纳状态时,所述第一旋转关节与所述第二旋转关节的轴线处于预设平面上。2.根据权利要求1所述的机器人,其特征在于:所述机械手还包括第三旋转关节,所述第二机械臂远离所述第二旋转关节的一端与所述第三旋转关节连接且所述第三旋转关节能够绕自身轴线转动,所述第三旋转关节的轴线与所述第一旋转关节的轴线平行,所述第三旋转关节用于连接作业机构。3.根据权利要求2所述的机器人,其特征在于:当所述机械手处于收纳状态时,所述第一旋转关节、所述第二旋转关节及所述第三旋转关节的轴线均处于所述预设平面上。4.根据权利要求2所述的机器人,其特征在于:所述机械手还包括涂料机构,所述涂料机构与所述第三旋转关节连接。5.根据权利要求4所述的机器人,其特征在于:所述涂料机构包括涂料件、第四旋转关节及第五旋转关节,所述第三旋转关节与所述第四旋转关节连接且所述第四旋转关节能绕自身轴线转动,所述第三旋转关节的轴线与所述第四旋转关节的轴线相互垂直,所述第五旋转关节与所述第四旋转关节连接,且所述第五旋转关节能够绕自身轴线转动,所述第五旋转关节的轴线与所述第四旋转关节的轴线垂直且与所述第三旋转关节的轴线平行,所述第五旋转关节与所述涂料件连接。6.根据权利要求1所述的机器人,其特征在于:所述机器人本体包括行走装置及机架,所述行走装置具有一安装面,所述机架设置于安装面,所述安装面与机架共同限定出所述收纳空间,所述基座设置于所述安装面或设置于所述机架远离所述安装面的一侧。7.根据权利要求6所述的机器人,其特征在于:所述基座设置于所述机架远离所述安装面的一侧。8.根据权利要求6所述的机器人,其特征在于:所述基座包括底板及立柱,所述底板设置于所述机架远离所述安装面的一侧,且所述底板至少部分位于所述收纳空间,且所述立柱与位于所述收纳空间部分的所述底板连接,所述第一旋转关节与所述立柱呈夹角连接且与所述立柱可转动连接。9.根据权利要求8所述的机器人,其特征在于:所述立柱可转动的设置于所述底板,且所述立柱能绕自身轴线转动。10.根据权利要求1所述的机器人,其特征在于:所述第一机械臂的长度大于所述第二机械臂的长度。
技术总结
本实用新型提供的一种机器人,涉及机器人设计领域。机器人包括机器人本体及器械手,机器人本体具有收纳空间,机械手包括基座、第一旋转关节、第一机械臂、第二旋转关节及第二机械臂,基座与机器人本体连接述第一旋转关节与基座转动连接,第一机械臂一端与第一旋转关节连接,另一端与第二旋转关节连接,第二机械臂与第二旋转关节连接,第一旋转关节与第二旋转关节均能够绕自身轴线转动,第一旋转关节的轴线与第二旋转关节的轴线平行,且机械手能够完全收纳于收纳空间。当第一机械臂与第二机械臂在收纳时,第一旋转关节的轴线与第二旋转关节的轴线处于预设平面上,能够将第一机械臂及第二机械臂处于一条直线上,保证在空间中占用的空间最小。空间最小。空间最小。
技术研发人员:赵国增 季瑞南 王焕捷
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:2022.08.01
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。